







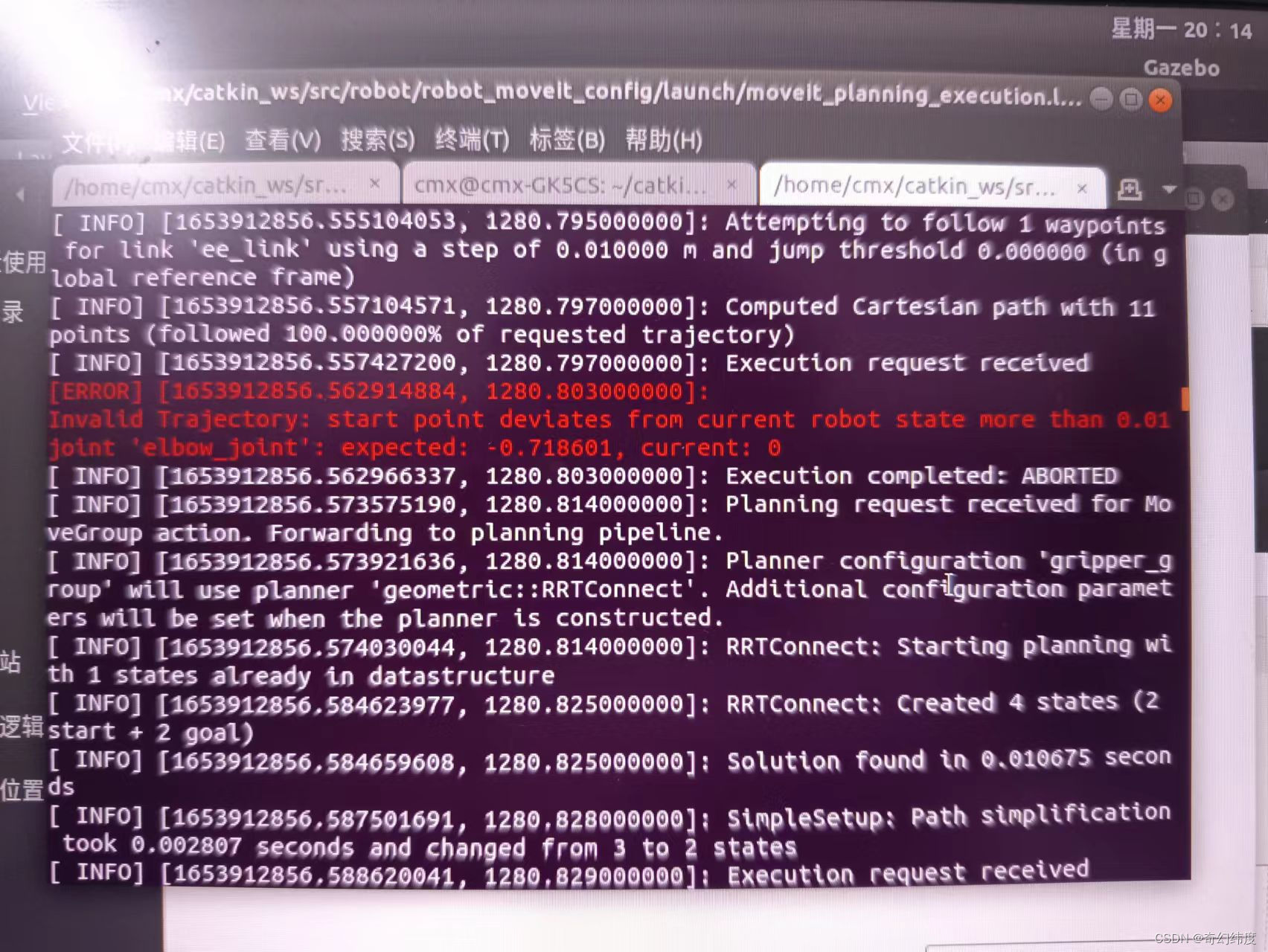
笛卡尔直线规划报错:Invalid Trajectory: start point deviates from current robot state more than 0.011
问题分析
1、机械臂抖动大,导致起始位姿改变
2、move_group获取的机械臂状态不对
解决措施
1、针对第一种原因,可以采用以下解决措施
设置机械臂当前的状态作为运动初始状态
group.setStartStateToCurrentState();
放大误差允许范围
group.setGoalPositionTolerance(0.001);//单位是米
group.setGoalOrientationTolerance(0.02);//单位是弧度
2、针对第二种原因,可以采用以下解决措施
检查下发布节点
rqt_graph
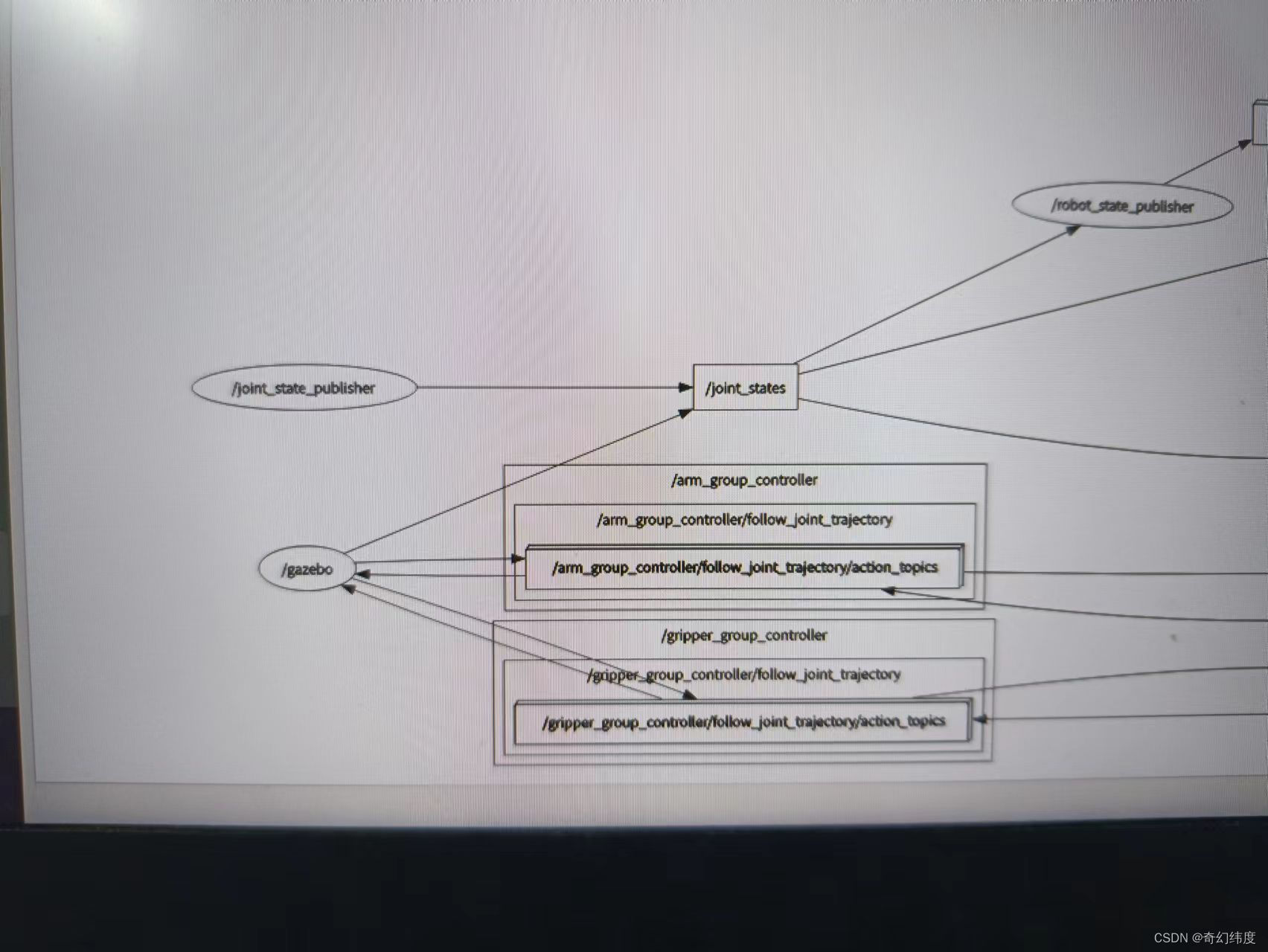 如果发现除了gazebo发布机械臂状态外,还有另一个节点/joint_state_publisher发布机械臂状态,则具体原因是出现在move_group接收了多个节点发布的机械臂状态
如果发现除了gazebo发布机械臂状态外,还有另一个节点/joint_state_publisher发布机械臂状态,则具体原因是出现在move_group接收了多个节点发布的机械臂状态
很明显,解决措施就是找到启动/joint_state_publisher节点的luanch文件,将该启动节点命令注释掉
最后附上一些无关但有用的知识:
机器人总是处于驱动所认为的相同位置。或者几乎是,机器人以125hz的频率向驱动发送它的位置,所以驱动对机器人位置的感知可能会有多达8毫秒的延迟,这取决于你向驱动询问信息的时间。当驱动程序从机器人接收到该信息时,它将该信息发布到/joint_states
计算轨迹时遵循的步骤:
①计算目标的IK
②构建轨迹等待/joint_states
③等待/joint_states的消息
④根据/joint_state的新值更新起始位置
⑤将轨迹发送给驱动程序














 2196
2196











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









