









本章在动力学建模完成的前提下进行
传送门:【CoppeliaSim】(原V-rep)模型文件导入及动力学建模_魚香肉丝盖饭的博客-CSDN博客_vrep导入stl
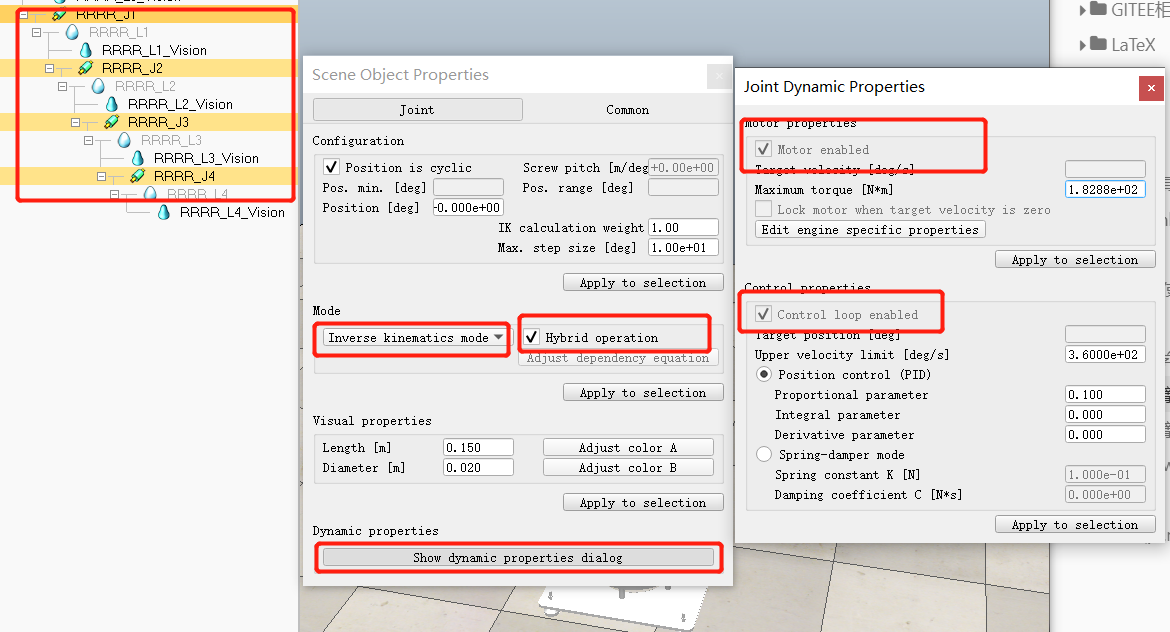
1) 将所有关节的运行模式改为逆运动学模式
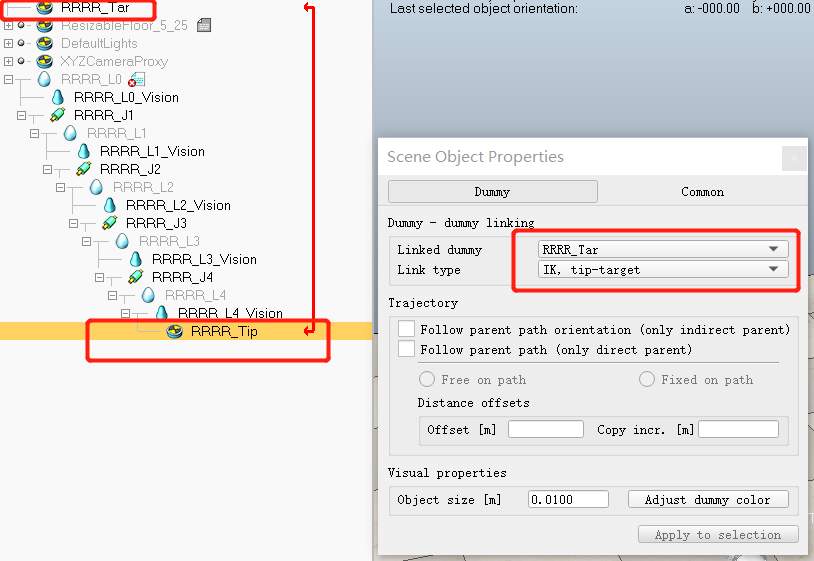
2)添加Tar&Tip
Add -> dummy -> rename "RRRR_Tar"&"RRRR_Tip" -> 将Tip挂在结构树末端下
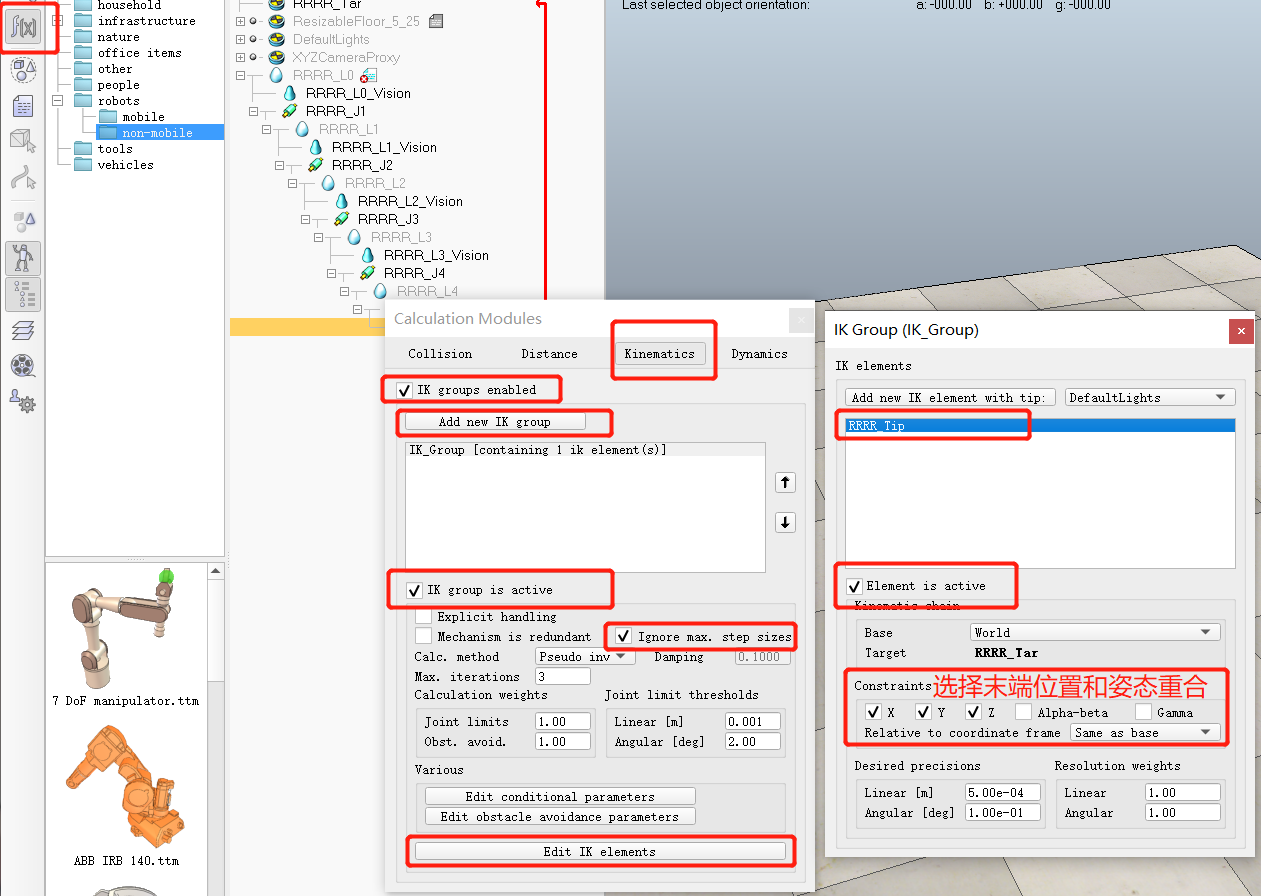
3)设置逆解计算模式
4)运行仿真后拖动Tar 可以看到Tip点的跟随
逆运动学(tar-tip)动画
本章在动力学建模完成的前提下进行传送门:【CoppeliaSim】(原V-rep)模型文件导入及动力学建模_魚香肉丝盖饭的博客-CSDN博客_vrep导入stl
Add -> dummy -> rename "RRRR_Tar"&"RRRR_Tip" -> 将Tip挂在结构树末端下
逆运动学(tar-tip)动画
 2287
3952
2287
3952











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言

























