







文章目录
1 简介
本文介绍了AUTOSAR BSW中PDUR模块的功能,API及配置。
PDUR模块的主要任务是从总线访问类型(接口层和TP层)和总线类型本身进行抽象。
由于PDUR模块必须在上下层间往复路由Tx和Rx PDU,并且使用PDUR的任意软件组件有自己的句柄空间,就需要配置多个路由表。PDUR把输入句柄作为相关路由表的索引。
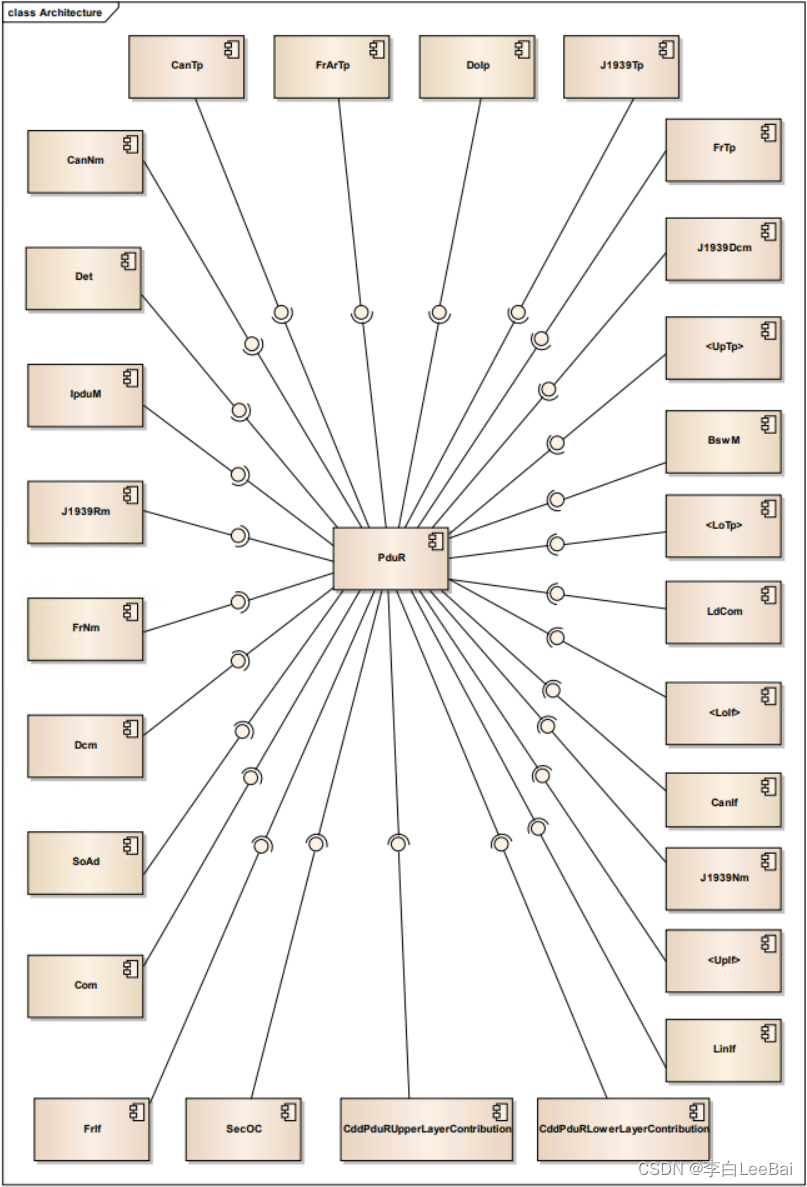
1.1 架构概览
PDUR在AUTOSAR架构中的位置如图所示:

PDUR模块与其相邻模块的接口:
应用层不能直接访问BSW模块的服务,它们必须通过RTE来使用BSW模块提供的服务端口。
2 功能描述
2.1 特性
下表所列的特性包含了PDUR的全部功能。达芬奇对标准AUTOSAR的实现包含了三部分:
- 已实现的AUTOSAR特性
| 支持的遵循AUTOSAR标准特性 |
|---|
| 预编译和编译后配置变型 |
| I-PDU的收发 |
| 取消接收/发送 |

 订阅专栏 解锁全文
订阅专栏 解锁全文















 1641
1641











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









