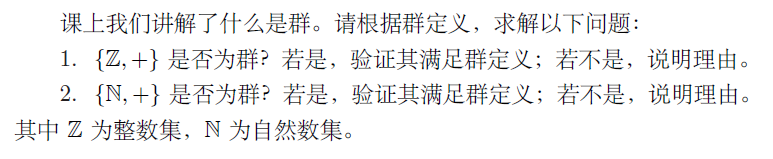
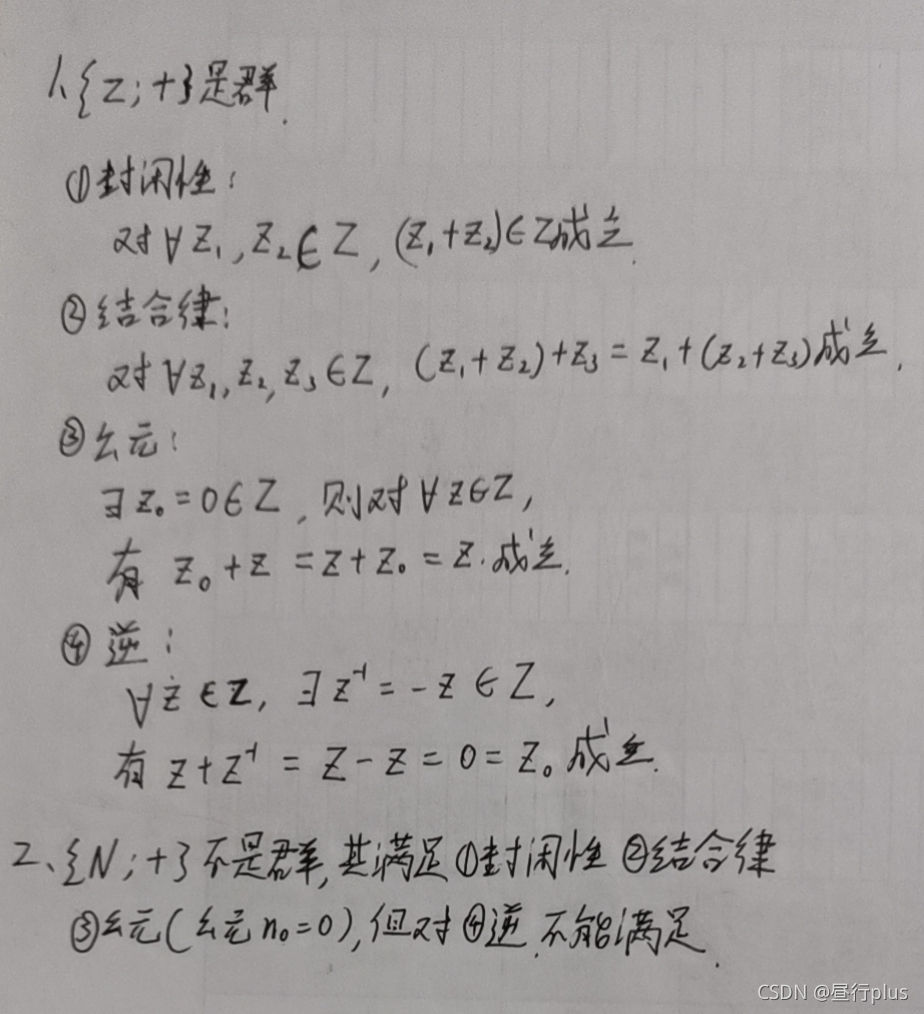
2 群的性质 先看群的定义: 补充: 3. 解释什么是阿贝尔群。并说明矩阵及乘法构成的群是否为阿贝尔群。 阿贝尔群(Abel Group)又称交换群或可交换群, 它由自身的集合 G 和二元运算 * 构成。它除了满足一般的群公理,即运算的结合律、G 有单位元、所有 G 的元素都有逆元之外,还满足交换律公理。因为阿贝尔群的群运算满足交换律和结合律,群元素乘积的值与乘法运算时的次序无关。 plus: 矩阵即使是可逆矩阵,一般不形成在乘法下的阿贝尔群&#x








 超级会员免费看
超级会员免费看


 订阅专栏 解锁全文
订阅专栏 解锁全文
















 726
726











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








