






 本文介绍了多目标优化算法中的四种常用分解方法:加权和WS、切比雪夫TCH、基于惩罚边界交叉口PBI以及张青富团队提出的网格约束分解CDG。这些方法分别通过不同的策略处理多目标问题,如加权和通过权重调整目标重要性,切比雪夫利用最优点和最差点,PBI引入惩罚项,而CDG则采用网格划分策略。
本文介绍了多目标优化算法中的四种常用分解方法:加权和WS、切比雪夫TCH、基于惩罚边界交叉口PBI以及张青富团队提出的网格约束分解CDG。这些方法分别通过不同的策略处理多目标问题,如加权和通过权重调整目标重要性,切比雪夫利用最优点和最差点,PBI引入惩罚项,而CDG则采用网格划分策略。
在基于分解的MOEA中最常用的分解方法为:
加权和WS(weighted sum)
切比雪夫TCH(tchebycheff)
基于惩罚边界交叉口PBI(penalty-based boundary interesection)
2018年,张青富团队提出了一种新的划分方法:
网格约束分解CDG(a constrained decomposition with grids)。
下面对以上四种分解方法从原理及两目标空间上进行举例介绍。
第i个子问题上的方向向量为
λ
i
=
(
λ
1
.
.
.
.
.
.
λ
m
)
\lambda^{i}=(\lambda_{1}......\lambda_{m})
λi=(λ1......λm)
∑
j
=
1
m
λ
j
=
1
\sum_{j=1}^{m}{\lambda_{j}}=1
∑j=1mλj=1
WS
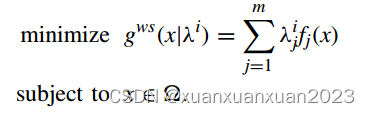
从上述公式中可以看出对每个目标进行简单的函数加权,通过权重大小不同的设置来体现不同问题的重要性。
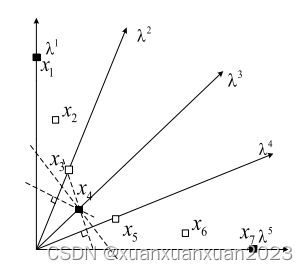
射线为不同的权重,虚线为对应得等高线。
WS的等高线为权重向量上的垂线
TCH

Z
i
∗
Z_{i}^{*}
Zi∗为理想点,在极小化目标中认为是最低点
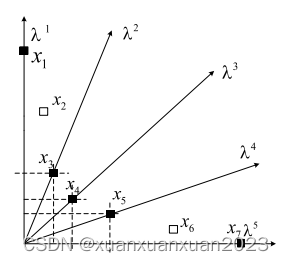
切比雪夫的原理从公式上来看较为复杂,但若从两目标为例的等高线上理解较为容易。
切比雪夫的等高线为权重向量上水平与迁直的两条虚线。从上图中可以看到
x
4
x_{4}
x4是所有点中的最优化点。
PBI
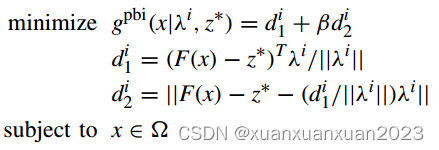
PBI的思想简单来说是指在对个体相对于权重方向上增加惩罚项,即为公式中
β
\beta
β。
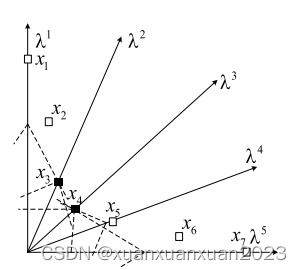
从图中可以看出,若个体距离权重向量越远则其增加的惩罚距离也就越大。
CDG
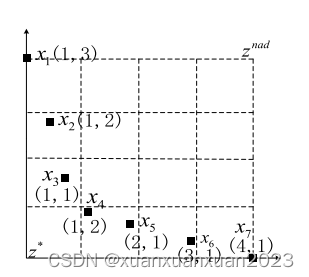
为了能够更好地理解CDG,先附上两目标示例图。可以看到基于最优点与最差点划分出了一块大区域,再基于后续计算将整块区域分为等面积的网格。
CDG的等高线就是于X轴、Y轴平行的直线。
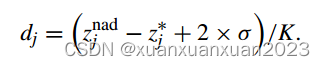
上述公式求解的是网格间隔宽度,其中K为预设定的划分数。

上述公式求解的是对于每个个体x所对应再网格中的位置,其中
σ
\sigma
σ为一个极小的正数,目的是为了保证个体落在网格内

上述公式为关于目标L的第K个子问题
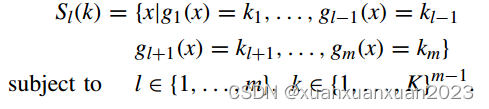
上述公式为关于目标L的第K个子问题的解集

















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









