





对于点云分割来说,最重要解决的问题基本上有两个,一个是点云的无序性问题,另一个是点云的不规则和稀疏问题。对于前者的问题,其实2017年的PointNet提出的对称函数(max pooling)就已经解决了,但是目前有很多取代之的方法。后者,很多网络利用学习邻域局部特征,编码相对位置特征解决,KPConv提出了一种可变形的Kernel,但是它的核点是固定的,针对不同的场景可能还需要进行改变,PAConv中的Kernel的灵活性要更高一点,而且PAConv的网络结构具有很大的灵活,可以利用其他先进网络的backbone。

PAConv的新颖点就是首先储存一个M数量的权重矩阵,按理来说,如果M的值越大,说明权重矩阵的多样性比较丰富,但是比较多的权重矩阵会导致计算量变大,产生冗余,降低效率。储存好权重矩阵后,需要将权重矩阵映射到三维点云空间中,PAConv设计的是一种ScoreNet,俗称打分网络,其实可以理解为通过搜索邻域后的一个相对位置关系学习到。
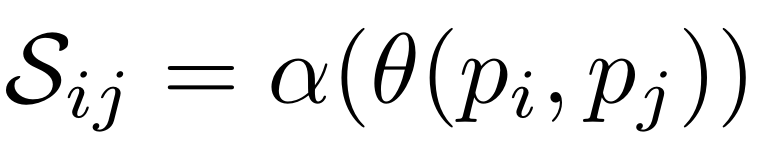
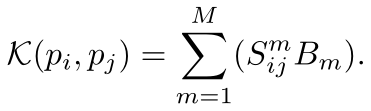
上面的公式中,θ是多层感知器实现的非线性函数,α是归一化函数,我们假设邻域搜索到了K个点,每个点和中心点都会学习到M个打分,一共就有K×M个打分系数。假设第一个邻域点的M个打分系数和储存的M个权重矩阵进行逐个相乘最后Sum求和,得到第一个Kernel,一共就有K个Kernel,再用这K个Kernel去卷积输入特征,最后利用SOP(对称运算)进行下采样,完成特征聚合。

对于分类和部分分割网络,PAConv是在DGCNN的Backbone上进行修改的,它将DGCNN网络中的EdgeConv替换为PAConv,用于提取特征。

对于大场景级别的语义分割任务,它是用PointNet++作为主干网络,将下采样中的PointNet提取特征部分换为PAConv提取特征,上采样中的其他部分都是PointNet++原有的网络,没有改动。
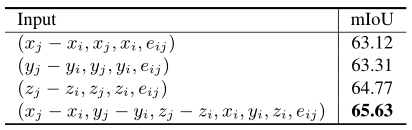
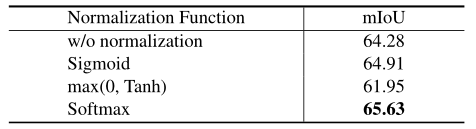
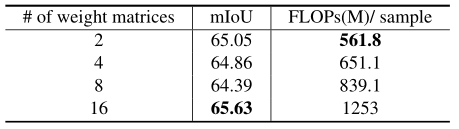
PAConv在比较先进的ModelNet、ShapePart、S3DIS数据集上达到了比较好的效果,消融实验证明ScoreNet在以三个方向(x,y,z)都提取特征时的效果是最好的,并且拼接了点之间的欧式距离。针对归一化函数,softmax优于其他方法。针对储存的权重矩阵数量M,在作者实验中,发现M为16时的结果最好,但是小劣势就是参数比较大,导致计算时间比较长。
【计算机视觉】简述对PAConv(对点云分割的动态核卷积)的理解
最新推荐文章于 2024-06-08 09:55:04 发布

















 2288
2288











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











