






 本文介绍了预设时间控制(PTC)的基本概念和发展历程。PTC由宋永端教授提出,旨在确保控制系统不仅稳定而且能在预定时间内达到稳定状态,适用于对控制精度要求高的场景如航天和导弹发射等。
本文介绍了预设时间控制(PTC)的基本概念和发展历程。PTC由宋永端教授提出,旨在确保控制系统不仅稳定而且能在预定时间内达到稳定状态,适用于对控制精度要求高的场景如航天和导弹发射等。
近期在看论文的时候看到PT控制相关的文献,整理了一下最新的研究成果,与大家共同学习。 预设时间控制的起源于重庆大学人工智能学院院长宋永端教授发表在Automatic上的"Time-varying feedback for regulation of normal-form nonlinear systems in prscribed finite time"文章,后续关于PT控制的研究大多都是据此展开。
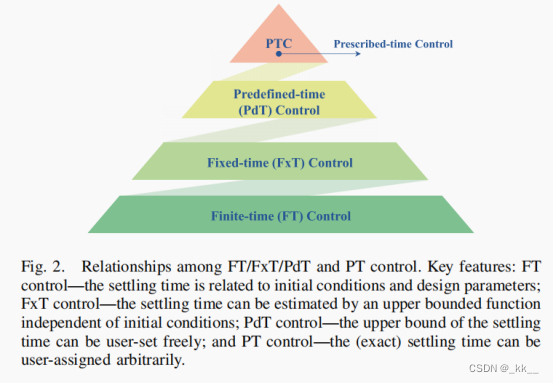
控制系统的前提是稳定,稳定的控制系统才能够进行工程上的运用。但是仅仅能够达到稳定并不意味着系统能够满足实际运用的需求,实际应用的系统往往还要求能够实现快速收敛以及高精度的特性。在一些控制精度较高的系统中,比如航空航天、导航制导以及导弹发射等领域,就要求控制系统能够在不依赖于系统初始状态和系统/控制参数的预定时间内快速收敛至平衡点,PT控制便由此产生。
下面是PT控制发展的几个阶段:
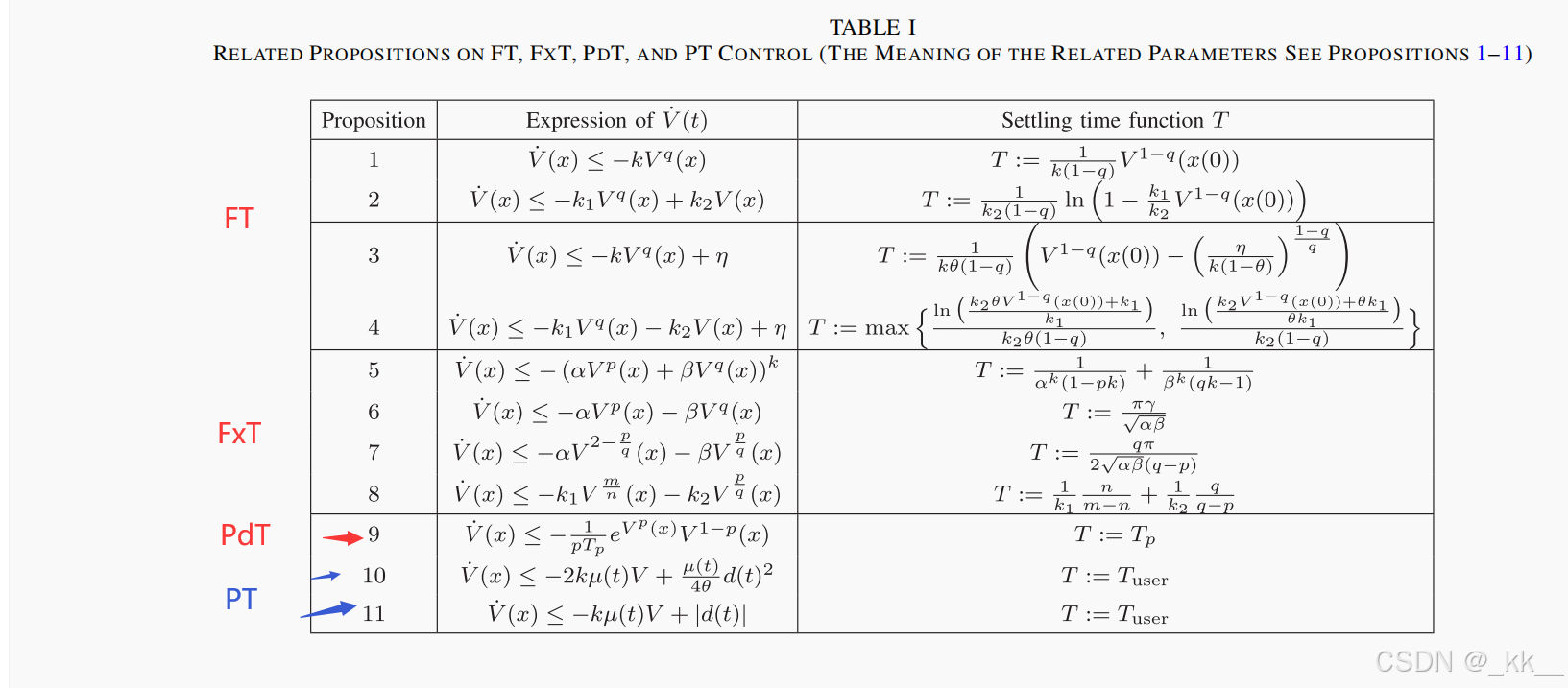
常见的Lyapunov函数形式以及相关收敛(稳定)时间的公式:
参考文献:Prescribed-Time Control and Its Latest Developments Y.D Song et.al.

















 495
495

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









