






一、realsense-viewer
首先从源码处下载对应压缩包并解压
mirrors / intelrealsense / librealsense · GitCode
进入解压后的空间下,执行如下代码:
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg
其实完成这一段,即使提示无法定位软件包dkms,也可以打开realsense-viewer了,如果打不开再进行后续的步骤。
sudo apt-get install libudev-dev pkg-config libgtk-3-dev
sudo apt-get install libusb-1.0-0-dev pkg-config
sudo apt-get install libglfw3-dev
sudo apt-get install libssl-dev
sudo cp config/99-realsense-libusb.rules /etc/udev/rules.d/
sudo udevadm control --reload-rules && udevadm trigger
mkdir build
cd build
cmake ../ -DBUILD_EXAMPLES=true
make
sudo make install完成后即可启动realsense-viewer。
二、realsense-ros-development
安装realsense-ros-development的源码网址如下:
mirrors / intelrealsense / realsense-ros · GitCode
编译命令如下:
cd ~/realsense_ws
catkin_make clean
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
echo "source ~/realsense_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
编译过程中可能会出现报错如下:

只需要将该功能包git下来以后放在realsense_ws/src下,重新进行编译工作即可。该功能包的调用命令如下:
git clone https://github.com/pal-robotics/ddynamic_reconfigure.git
编译安装完成后,运行launch文件会出现如下错误:
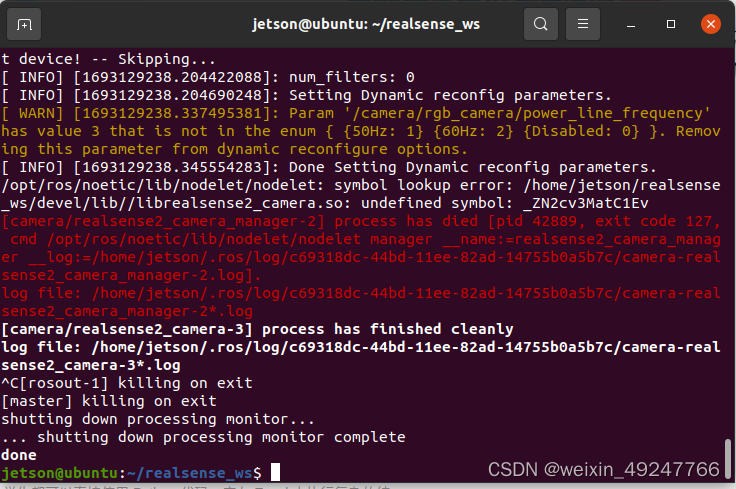
只需要修改以下realsense2_camera功能包下的Cmakelist文件即可。
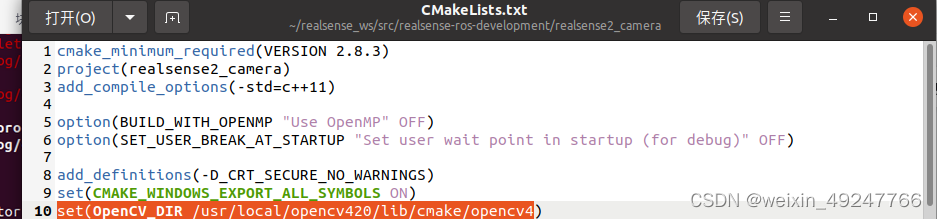
还需要修改CMakelist文件中如下两个地方,这两个地方是与路径无关的。
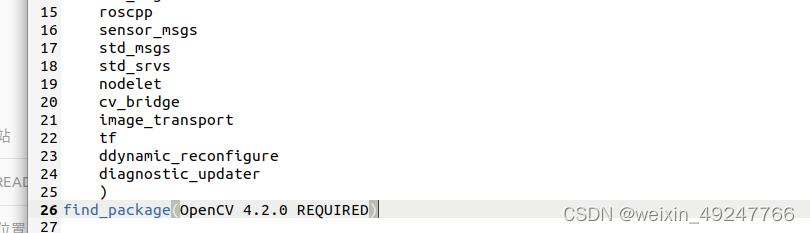

修改这三个地方后,重新编译运行即可。
可以使用locate命令对部分的文件所在位置进行定位。
如果没有locate命令,可以进行如下操作:
首先
sudo apt-get install locate
其次
sudo updatedb最后,使用locate
locate OpenCVConfig-version













 740
740











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









