







一、安装
1.添加源
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'

2.添加key
wget https://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
3.安装Gazebo
sudo apt-get update
sudo apt-get install gazebo9
sudo apt-get install libgazebo9-dev

出现以下错误,则重新输入命令sudo apt-get install gazebo9,直至下载成功(可能会多次出错)。
4.打开Gazebo
#输入命令
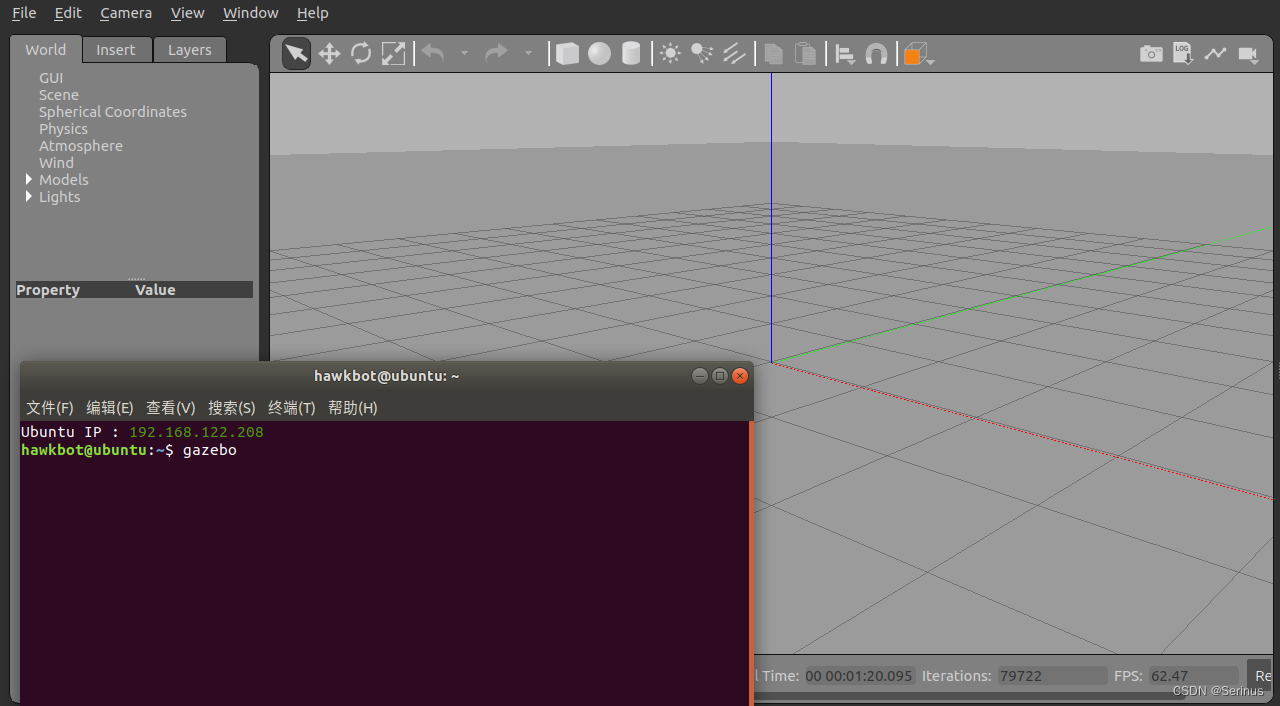
gazebo
出现以下界面则安装成功。
若报错:
VMware: vmw_ioctl_command error 无效的参数.
输入以下命令:
echo "export SVGA_VGPU10=0" >> ~/.bashrc
然后重启虚拟机。
二、与ROS连接
1.安装ROS-Gazebo接口
sudo apt install ros-melodic-gazebo-ros-pkgs ros-melodic-gazebo-msgs ros-melodic-gazebo-plugins ros-melodic-gazebo-ros-control
2.终端输入命令
roscore
#新开一个终端
rosrun gazebo_ros gazebo
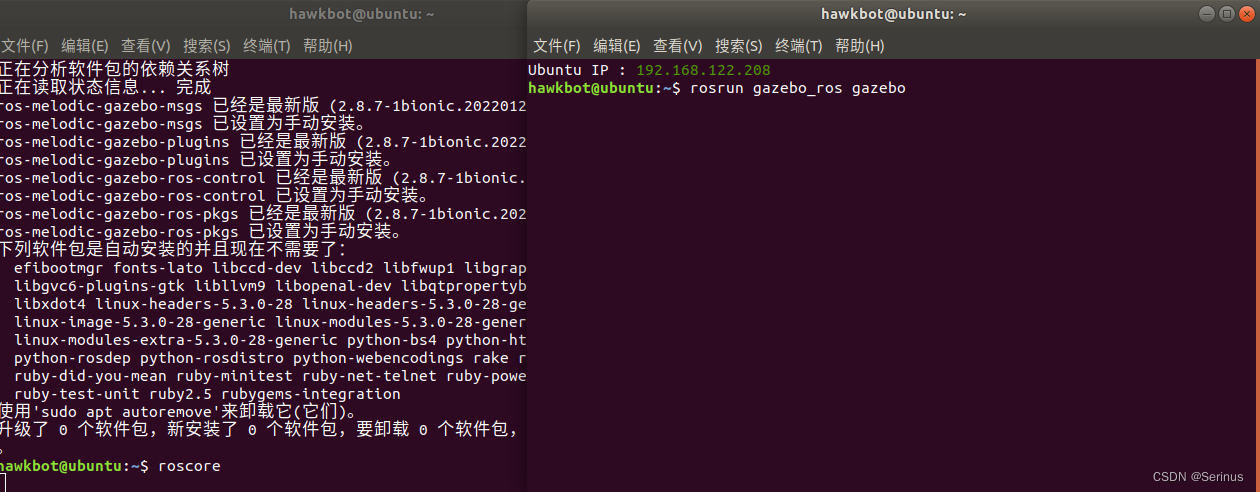
出现以下界面则说明与ROS连接成功。
反之,则输入以下命令:
cd ~/.gazebo/
mkdir -p models
cd ~/.gazebo/models/
wget http://file.ncnynl.com/ros/gazebo_models.txt
wget -i gazebo_models.txt
ls model.tar.g* | xargs -n1 tar xzvf
killall gzserver
killall gzclient
之后再输入:
roscore
#新开一个终端
rosrun gazebo_ros gazebo
出现Gazebo打开界面则连接成功。















 2462
2462











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









