







 RM 电机 GM6020使用
RM 电机 GM6020使用
简介
Robomaster夏令营笔记 个人记录自用
CAN+PID控制GM6020
CAN总线 差分信号传输
CubeMX
基础配置,记得开RX0和TX的中断 还有引脚复用(看个人连线)
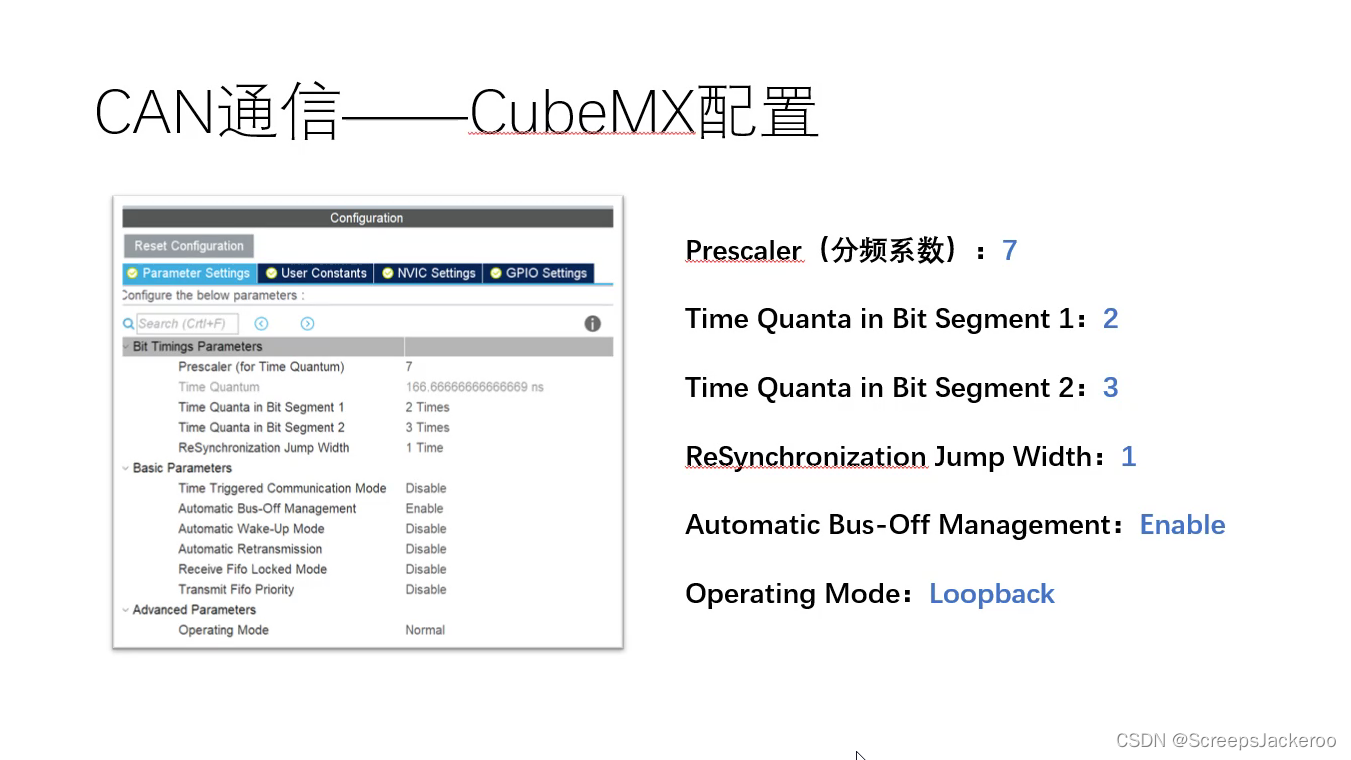
(修正 那个模式不用回环用normal 亲测在接收的时候进不到Callback里)
代码
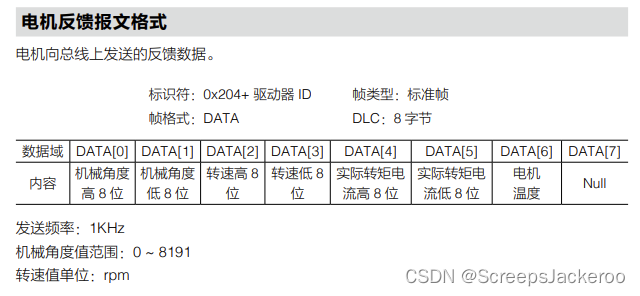
接收电机数据
接收电机向CAN总线上发的反馈数据 具体操作就是自己手动扭转电机 然后debug有数据变化即可
这里要参照GM6020的手册 接线等 以及CAN收发对应的ID 试验用电机ID为2 拨码开关控制 可以看闪灯 也详见手册
写一套过滤器 CAN1 errCnt统计有无初始化错误 对电机没有所谓主从 都设0即可
uint8_t errCnt = 0;
void can_user_init(CAN_HandleTypeDef* hcan )
{
CAN_FilterTypeDef Can1_Filter;
Can1_Filter.FilterActivation = ENABLE;
Can1_Filter.FilterMode = CAN_FILTERMODE_IDMASK;
Can1_Filter.FilterScale = CAN_FILTERSCALE_32BIT;
Can1_Filter.FilterIdHigh = 0x0000;
Can1_Filter.FilterIdLow = 0x0000;
Can1_Filter.FilterMaskIdHigh = 0x0000;
Can1_Filter.FilterMaskIdLow = 0x0000;
Can1_Filter.FilterBank = 0;
Can1_Filter.FilterFIFOAssignment = CAN_RX_FIFO0;
errCnt+=HAL_CAN_ConfigFilter(&hcan1, &Can1_Filter);
errCnt+=HAL_CAN_Start(&hcan1);
errCnt+=HAL_CAN_ActivateNotification(&hcan1, CAN_IT_RX_FIFO0_MSG_PENDING);
}
之后是Rx的回调函数 位运算对应寄存器的位解算
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{
CAN_RxHeaderTypeDef rx_header;
uint8_t rx_data[8];
if(hcan->Instance == CAN1)
{
HAL_CAN_GetRxMessage(hcan, CAN_RX_FIFO0, &rx_header, rx_data); //receive can data
switch(rx_header.StdId)
case < 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









