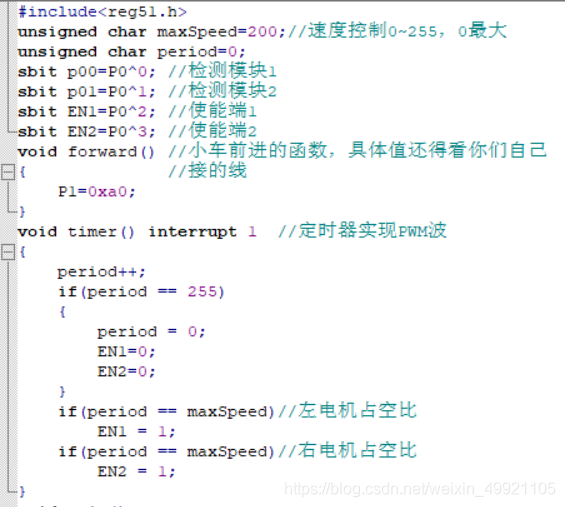
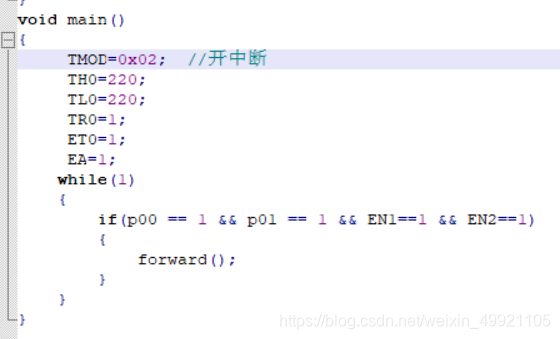
太君关于PWM波的见解 提到PWM波就让人联想到占空比,不错我认为占空比确实是PWM波的核心,看到这可别跑了。。。 我就讲讲我自己的理解: 原理:PWM是为了使某些原件的输出功率乘上某个系数从而调整原件的输出功率,但实际上好像只能缩小。 实现方法 因为我也初学现在只用过51单片机的定时器功能实现。。。 代码如图: 如果你采用我的代码请保证线要接的和我一样。 如果代码和接线无误,但是实现不了调速,检测使能端是否有问题。。。

























 465
465











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






