







ROS的Subscriber订阅者
什么是订阅者
接收信息,通过ROS Topic接收来自其它Node的信息,并通过回调函数处理
通常用于监测系统状态,如当机器人关节到达限位位置时触发运动中断
ROS Topic示例
Topic通信过程为:
- Publisher节点和Subscriber节点分别在Master进行注册
- Publisher发布Topic
- Subscriber在Master指挥下订阅Topic,从而建立起Pub-Sub之间的通信
Publisher Node Demo
#!/usr/bin/env python
#-- coding:UTF-8 --
import rospy
from std_msgs.msg import String
def push_msgs():
rospy.init_node("push_node", anonymous=False)
push_pub = rospy.Publisher("push", String, queue_size=10)
rate = rospy.Rate(100)
while not rospy.is_shutdown():
msg = "hello world"
push_pub.publish(msg)
rospy.loginfo("send message %s", msg)
rate.sleep()
if __name__ == "__main__":
push_msgs()
Subscriber Node Demo
#!/usr/bin/env python
#-- coding:UTF-8 --
import rospy
from std_msgs.msg import String
def stringSubscriberCallback(data): #data的数据类型与Subscriber接收的Topic对应的消息类型一致
rospy.loginfo('The contents of simple_topic: %s', data.data)
def stringSubscriber():
rospy.init_node('sub_node', anonymous = False) #初始化ROS节点
rospy.Subscriber('push', String, stringSubscriberCallback) #定义Subscriber对象
rospy.spin()
if __name__ == "__main__":
stringSubscriber()
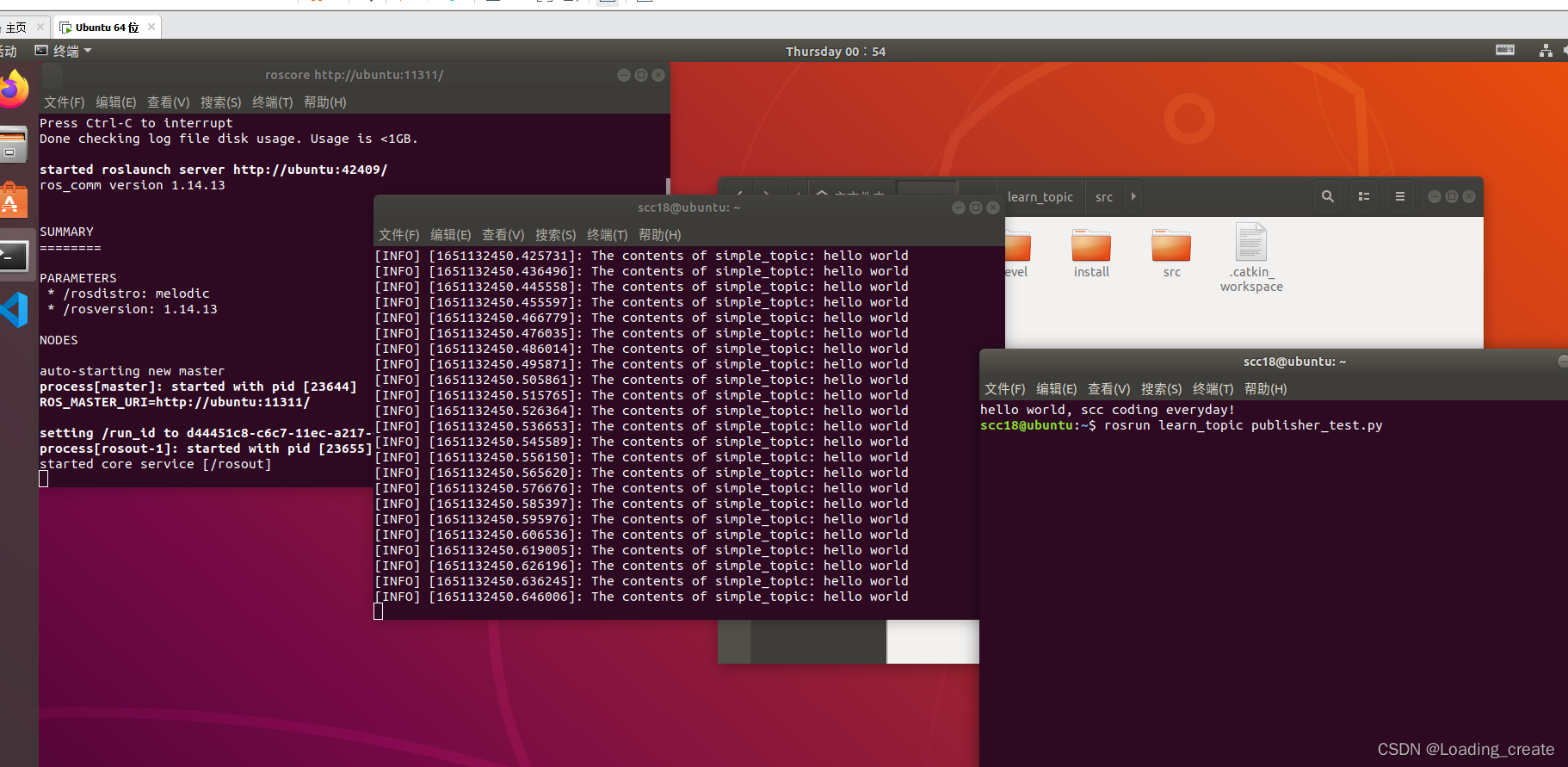
运行一下就是下面的效果
















 6938
6938











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











