






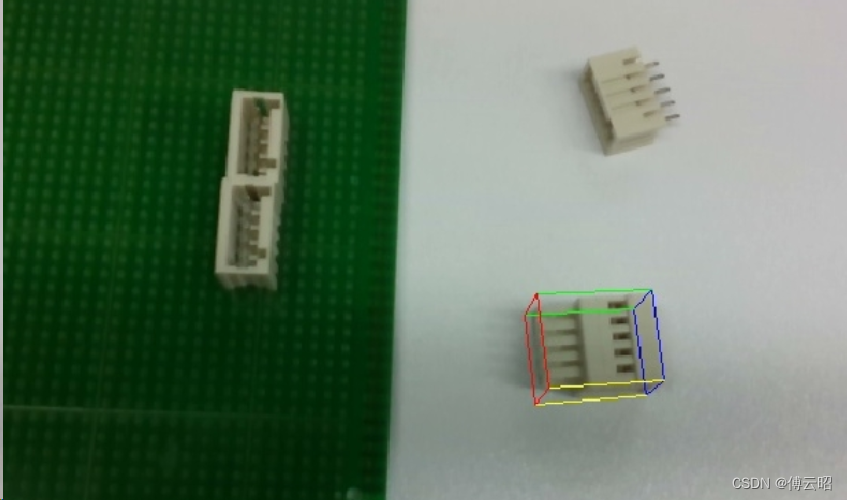
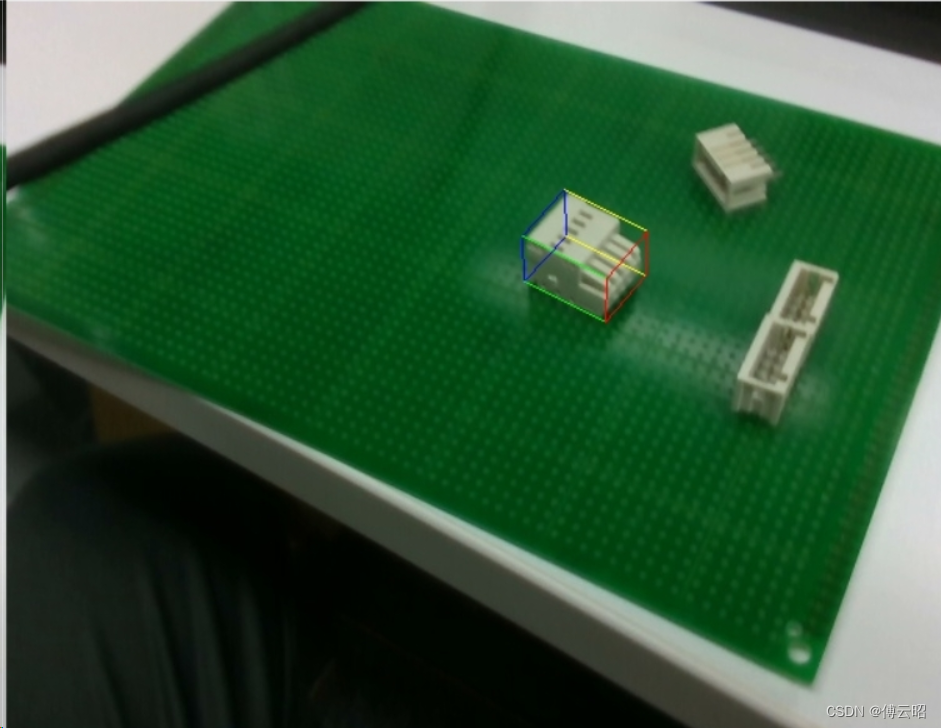
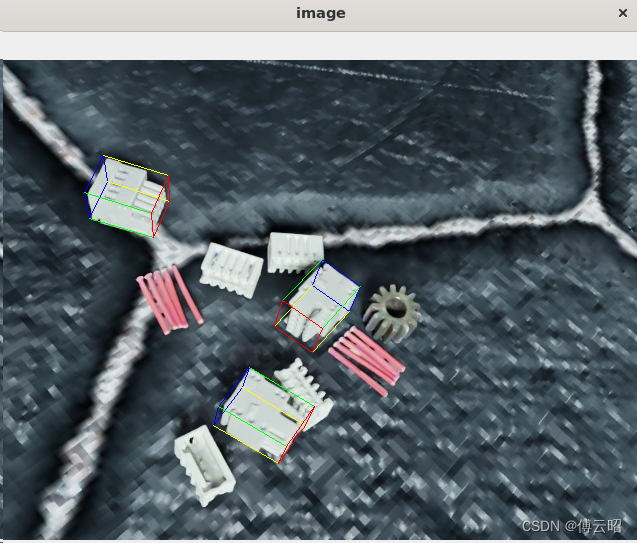
 本文介绍了如何使用Zebrapose和YOLO进行物体检测,从摄像头捕获的图像中获取目标(如齿轮)并进行姿态估计。通过计算和绘制目标在图像中的关键点,实现了对三维模型的可视化。
本文介绍了如何使用Zebrapose和YOLO进行物体检测,从摄像头捕获的图像中获取目标(如齿轮)并进行姿态估计。通过计算和绘制目标在图像中的关键点,实现了对三维模型的可视化。
 使用zebrapose
使用zebrapose
推理代码:
from zebrapose import zebra
from yolo import yolo
import cv2
import numpy as np
import pyrealsense2 as rs
import time
import json
import time
obj_dict = {
'in':(143, 54)#(model id, yolo id)
}
#symmetry_obj = ['gear']
symmetry_obj = [' ']
###
obj_name = 'in'
#K = [616.58,0,323.103, 0,616.778,238.464, 0.0, 0.0, 1.0]
K = [924.871,0,644.655, 0,925.167,357.695, 0.0, 0.0, 1.0]
###
def prj_marker2img(point,R,T,K):
point_cam = np.matmul(R, point) + T
point_pix = np.matmul(K, point_cam)
point_pix = point_pix/point_pix[2]
return point_pix[:2].astype(int)
def load_dims(model_id):
with open('./assets/models_info.json', 'r') as f:
model_info = json.load(f)
info = model_info[str(model_id)]
dims = [info['size_x'], info['size_y'], info['size_z']]
return dims
def get_bbox_masks_from_yolo(results, target_id):
bboxes = []
masks = []
for result in results:
if result[0].item() == target_id:
bboxes.append(result[1])
masks.append(result[2])
return bboxes, masks
if obj_name in symmetry_obj:
symmetry = True
point_list = []
num_point = 12
for i in range(num_point):
x = np.cos(i*2*np.pi/num_point)
y = np.sin(i*2*np.pi/num_point)
point_list.append((x,y))
else:
symmetry = False
dims = load_dims(obj_dict[obj_name][0])
zebra = zebra(obj_name, obj_dict[obj_name][0], K, 17)
yolo = yolo()
target_yolo_id = obj_dict[obj_name][1]
#color_image = cv2.imread('/home/fuzhao/poseEstimate/zebraPose_inference_gear2/data/rgb5/1702881914.jpg')
color_image = cv2.imread('/home/fuzhao/poseEstimate/zebraPose_inference_gear2/data/rgb5/32.jpg')
t0 = time.time()
yolo_results = yolo.predict(color_image, conf=0.5)
bboxes, masks = get_bbox_masks_from_yolo(yolo_results, target_yolo_id)
print("bboxes.shape",len(bboxes))
#bboxes, masks = bboxes[40:], masks[40:]
#bboxes, masks =[bboxes[1]], [masks[1]]
##for i in range(len(bboxes0)):
## center_x, center_y, w, h = bboxes0[i]
## if center_x > 188 and center_x < 215 and center_y >330 and center_y < 360:
## bboxes = [bboxes0[i]]
## masks = [masks0[i]]
## break
##bbox = [(188.0+215.0)/2,(330.0+360.0)/2,27.0,30.0]
##fake_mask = cv2.imread('./images/masks/000019_000019.png',0)
##fake_mask = fake_mask.astype(np.float32)/255.0
##bboxes, masks = [bbox], [fake_mask]
#cv2.imwrite('yolo_mask.jpg', (masks[0]*255).astype(np.uint8))
##for bbox in bboxes:
## bbox = bbox.astype(int)
## x,y,w,h = bbox
## cv2.rectangle(color_image, (int(x-w/2), int(y-h/2)), (int(x+w/2), int(y+h/2)),(255,0,0),1)
##cv2.imshow('roi', color_image)
##cv2.waitKey(0)
r_list, t_list = zebra.predict(color_image, bboxes, masks, debug=True)
print("total infer time:",time.time() - t0 )
print("len(r_list):",len(r_list))
for i in range(len(r_list)):
r_predict = r_list[i]
t_predict = t_list[i]
rot_mat = r_predict
point_center = t_predict[:,0]
K = zebra.cam_K
if symmetry:
upper_circle_point = []
lower_circle_point = []
radius = max(dims[0], dims[1])/2.0
for point in point_list:
point_object = np.array([point[0]*radius, point[1]*radius, dims[2]/2.0])
point_img = prj_marker2img(point_object, rot_mat, point_center, K)
upper_circle_point.append(point_img)
for point in point_list:
point_object = np.array([point[0]*radius, point[1]*radius, -dims[2]/2.0])
point_img = prj_marker2img(point_object, rot_mat, point_center, K)
lower_circle_point.append(point_img)
for i in range(num_point):
cv2.line(color_image, upper_circle_point[i-1], upper_circle_point[i], (255,0,0),1)
cv2.line(color_image, lower_circle_point[i-1], lower_circle_point[i], (0,255,0),1)
#cv2.line(color_image, upper_circle_point[i], lower_circle_point[i], (0,0,255),1)
else:
point_object = np.array([dims[0]/2, dims[1]/2, dims[2]/2])
point_img1 = prj_marker2img(point_object,rot_mat,point_center,K)
point_object = np.array([-dims[0]/2, dims[1]/2, dims[2]/2])
point_img2 = prj_marker2img(point_object,rot_mat,point_center,K)
point_object = np.array([dims[0]/2, -dims[1]/2, dims[2]/2])
point_img3 = prj_marker2img(point_object,rot_mat,point_center,K)
point_object = np.array([-dims[0]/2, -dims[1]/2, dims[2]/2])
point_img4 = prj_marker2img(point_object,rot_mat,point_center,K)
point_object = np.array([dims[0]/2, dims[1]/2, -dims[2]/2])
point_img5 = prj_marker2img(point_object,rot_mat,point_center,K)
point_object = np.array([-dims[0]/2, dims[1]/2, -dims[2]/2])
point_img6 = prj_marker2img(point_object,rot_mat,point_center,K)
point_object = np.array([dims[0]/2, -dims[1]/2, -dims[2]/2])
point_img7 = prj_marker2img(point_object,rot_mat,point_center,K)
point_object = np.array([-dims[0]/2, -dims[1]/2, -dims[2]/2])
point_img8 = prj_marker2img(point_object,rot_mat,point_center,K)
cv2.line(color_image, point_img5, point_img6, (255,0,0),1)
cv2.line(color_image, point_img6, point_img8, (255,0,0),1)
cv2.line(color_image, point_img8, point_img7, (255,0,0),1)
cv2.line(color_image, point_img5, point_img7, (255,0,0),1)
cv2.line(color_image, point_img1, point_img5, (0,255,0),1)
cv2.line(color_image, point_img2, point_img6, (0,255,0),1)
cv2.line(color_image, point_img3, point_img7, (0,255,255),1)
cv2.line(color_image, point_img4, point_img8, (0,255,255),1)
cv2.line(color_image, point_img1, point_img2, (0,0,255),1)
cv2.line(color_image, point_img2, point_img4, (0,0,255),1)
cv2.line(color_image, point_img4, point_img3, (0,0,255),1)
cv2.line(color_image, point_img1, point_img3, (0,0,255),1)
cv2.imshow('image', color_image)
cv2.waitKey(0)
















 5216
5216











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









