







案例效果
WeChat_20220603201218
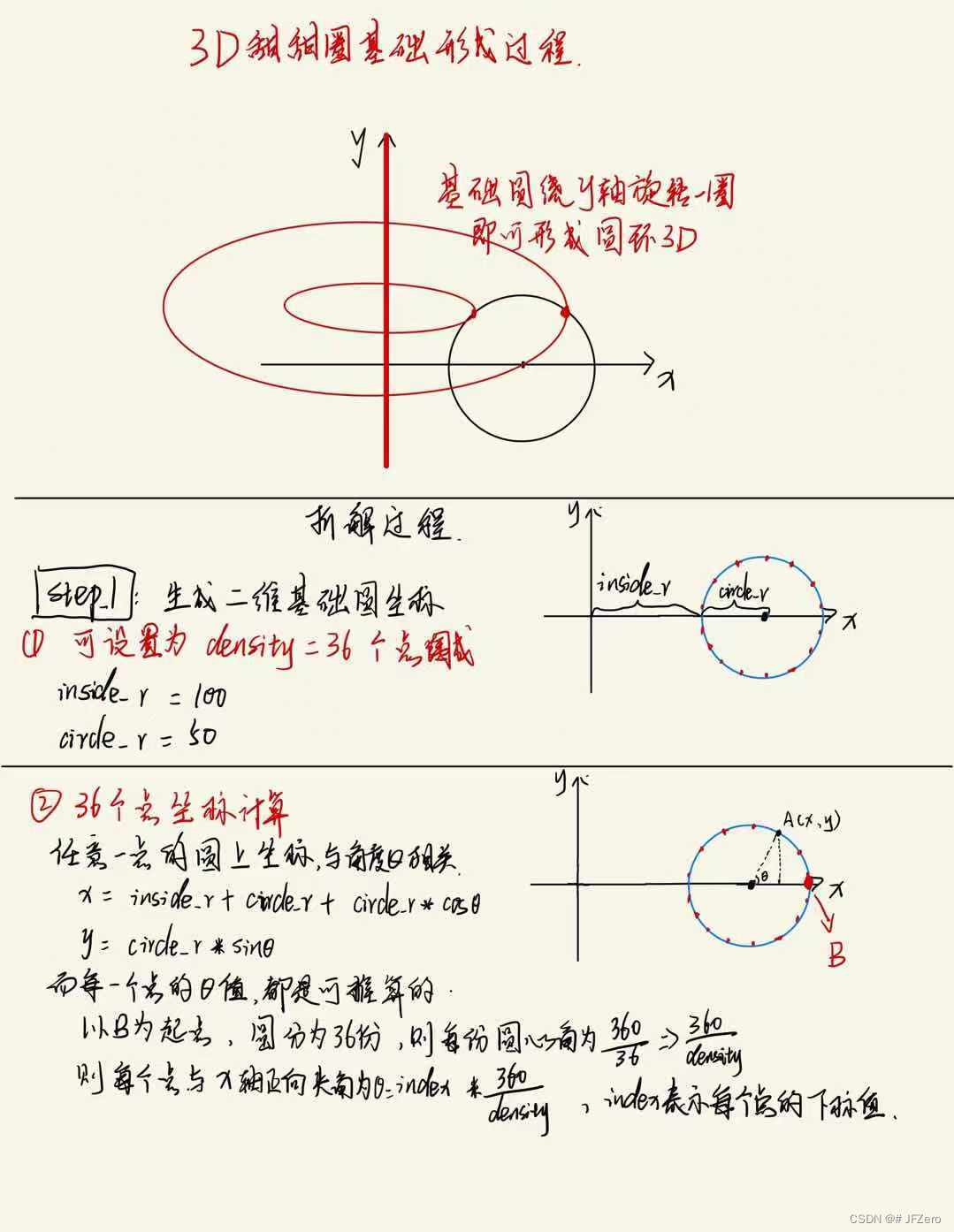
拆解过程
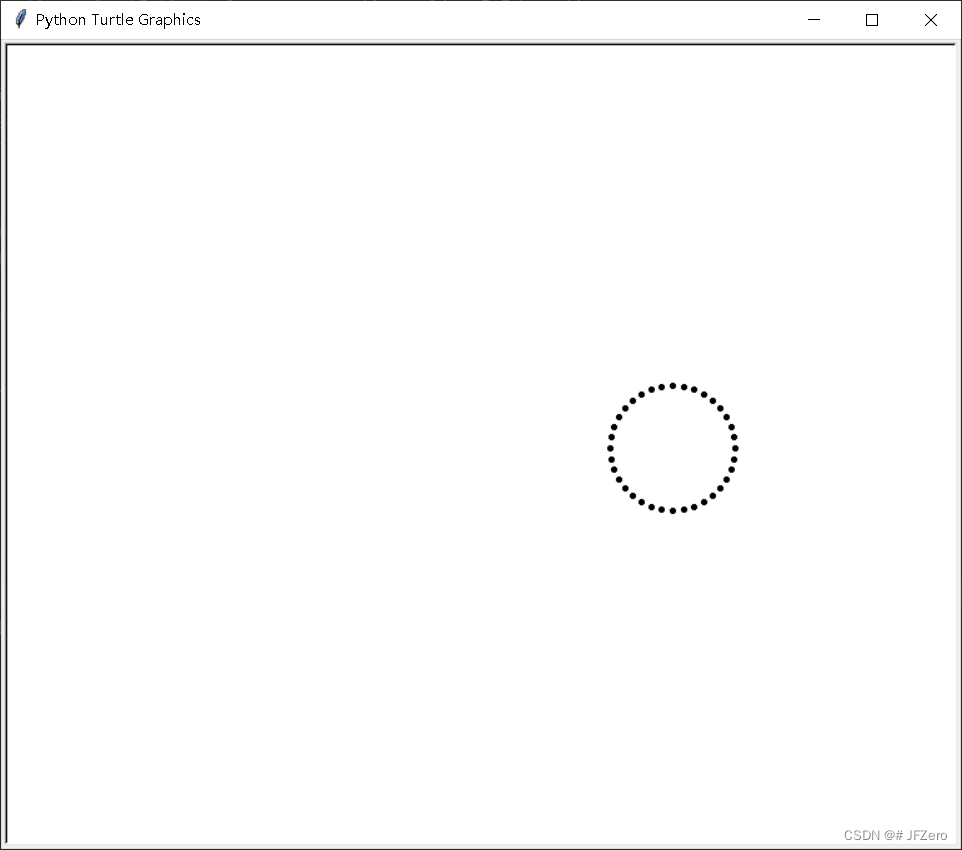
- 二维基础圆雏形
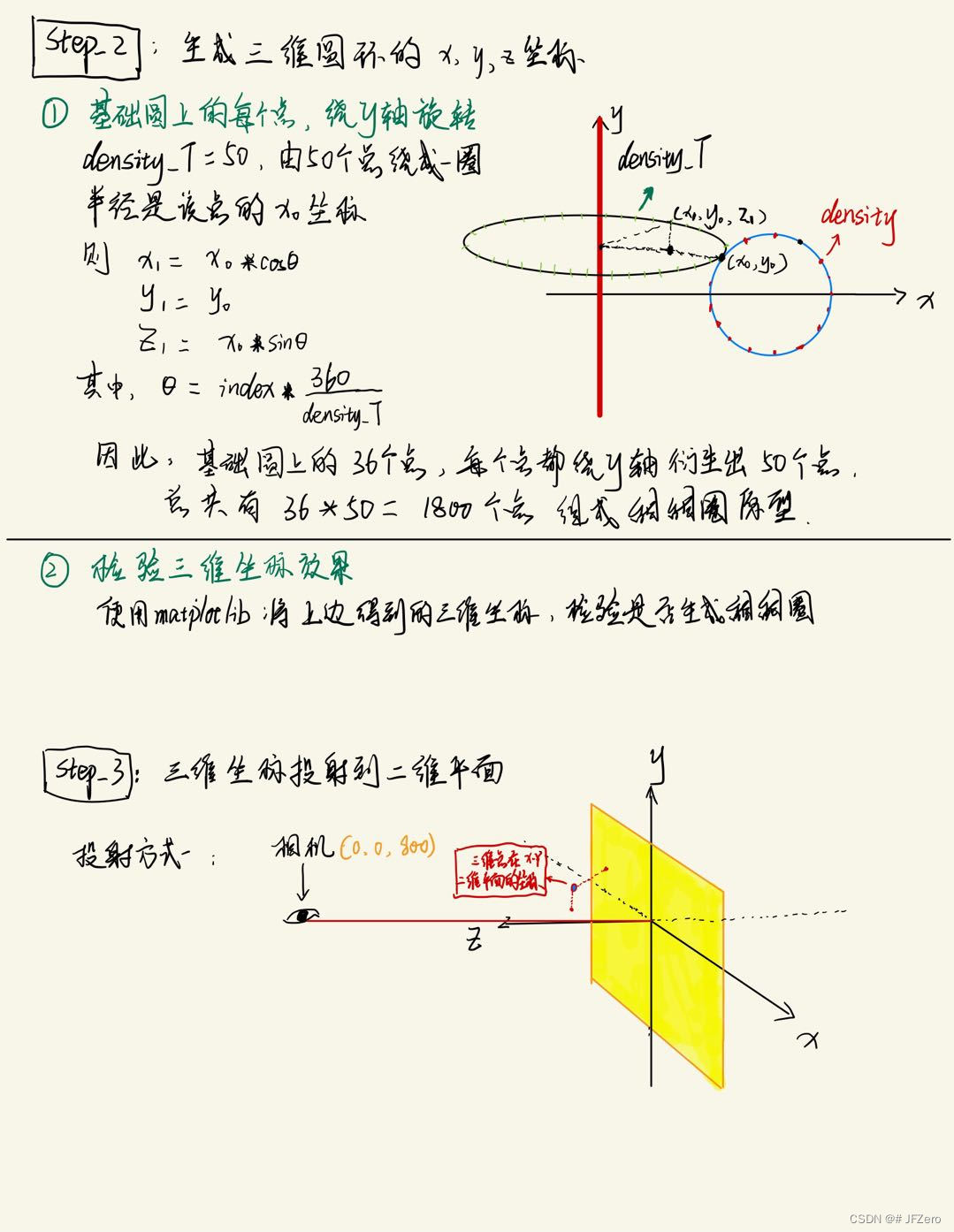
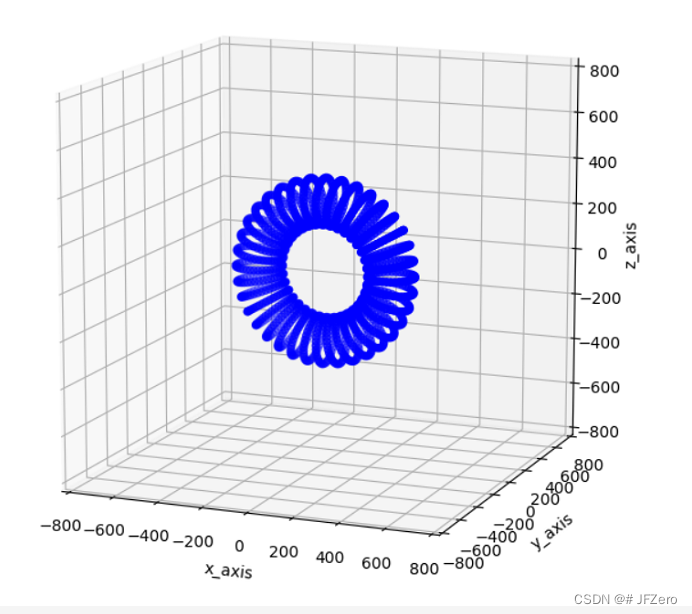
- 演变为三维坐标,并检验三维坐标效果
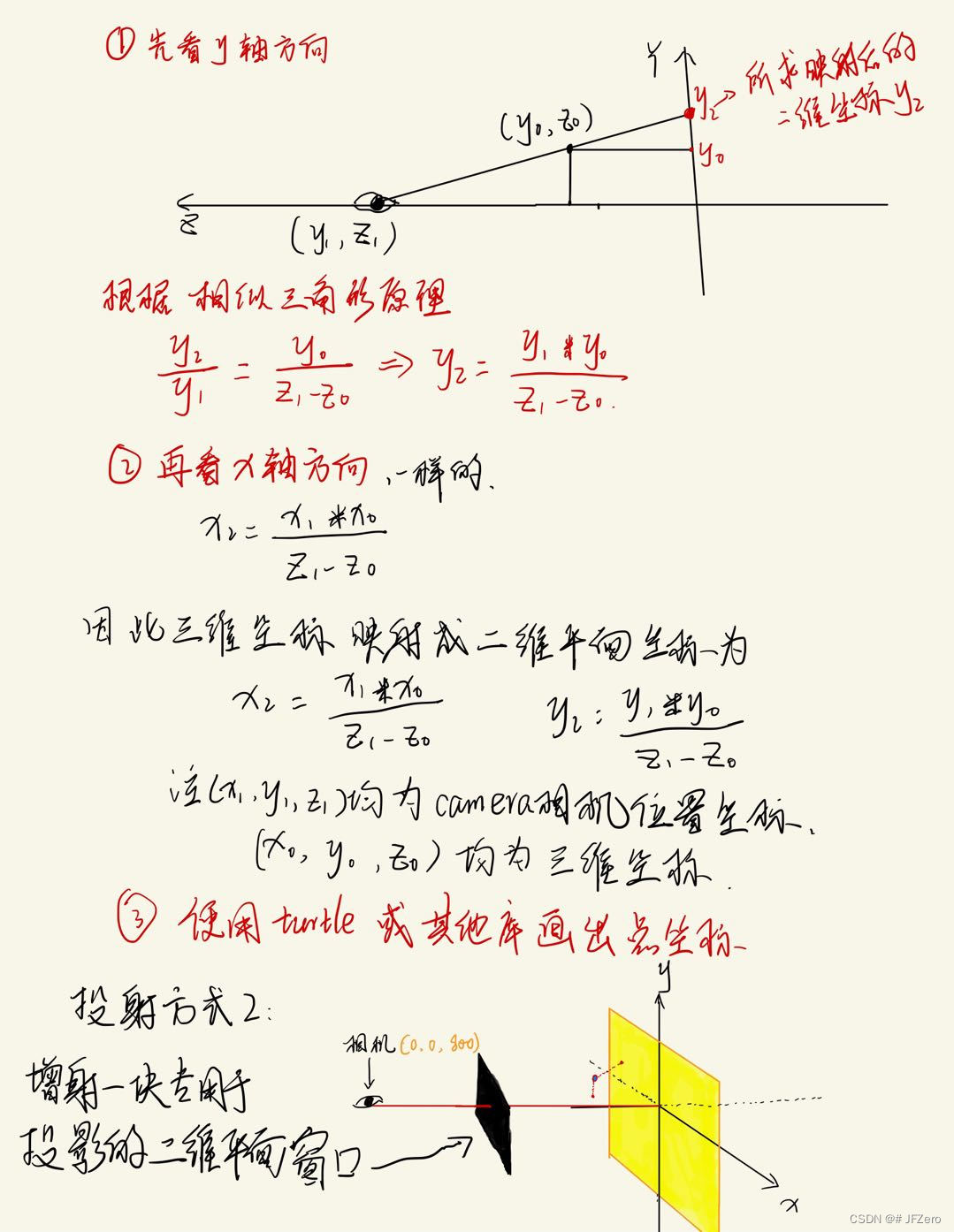
- 三维坐标投射到二维平面
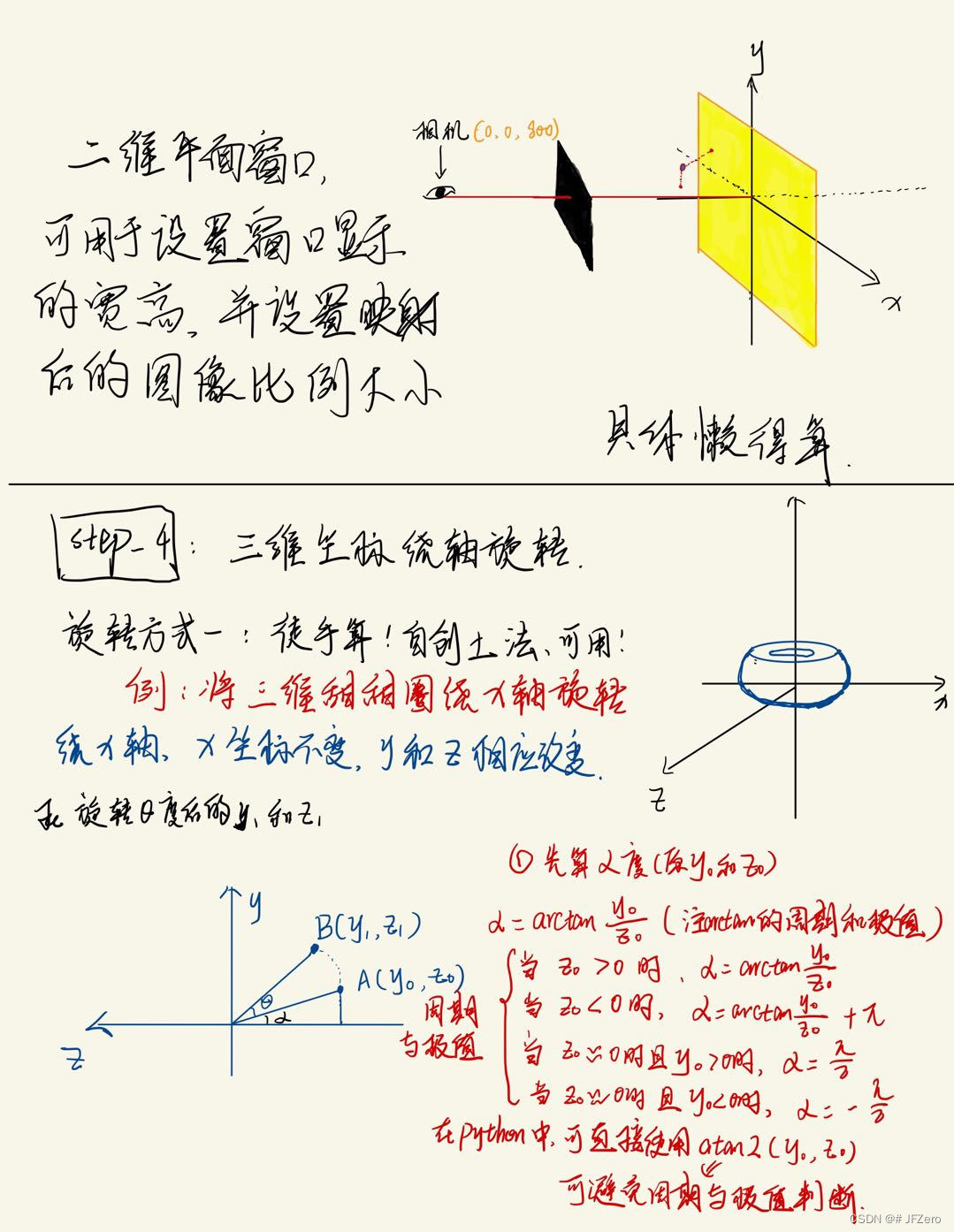
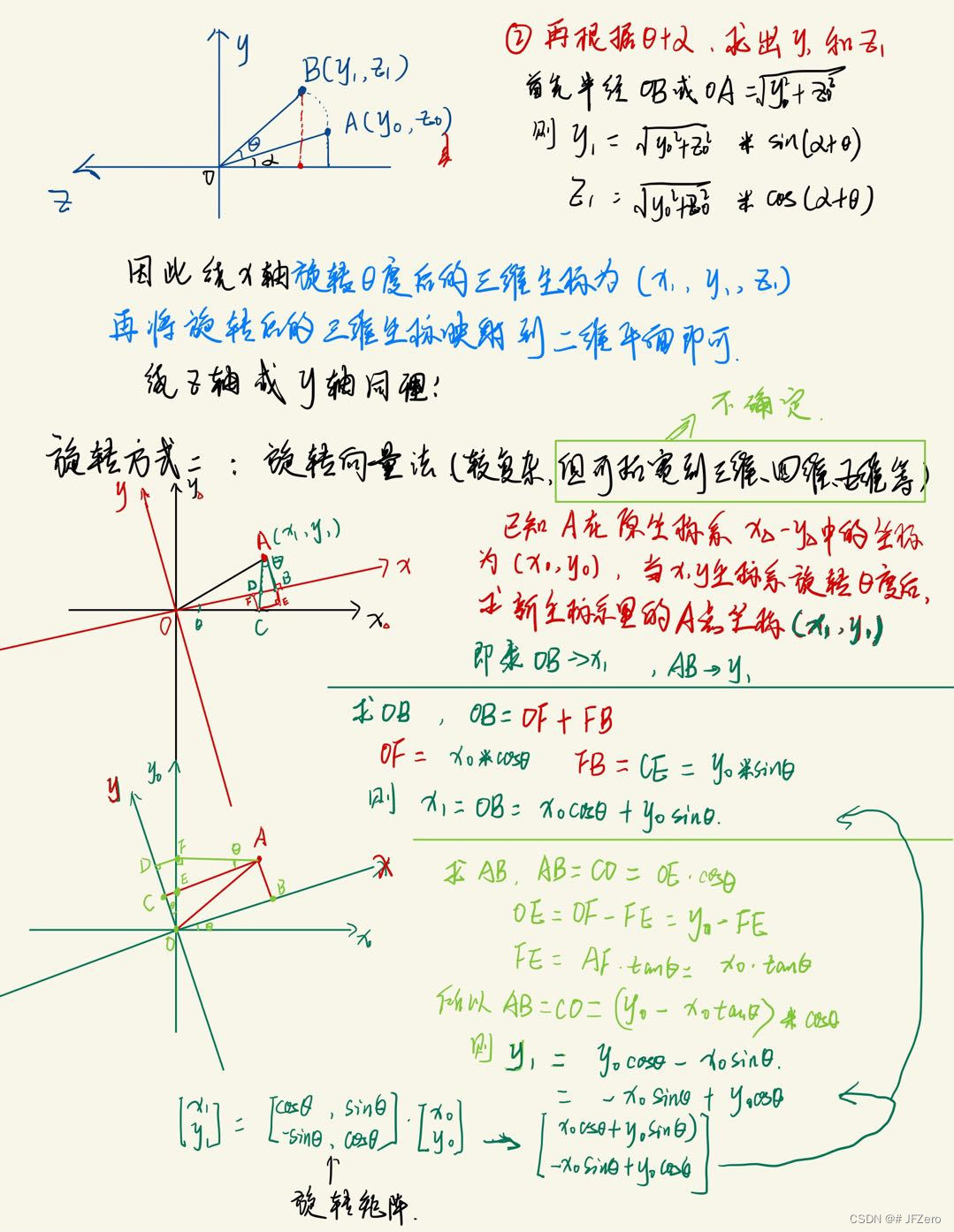
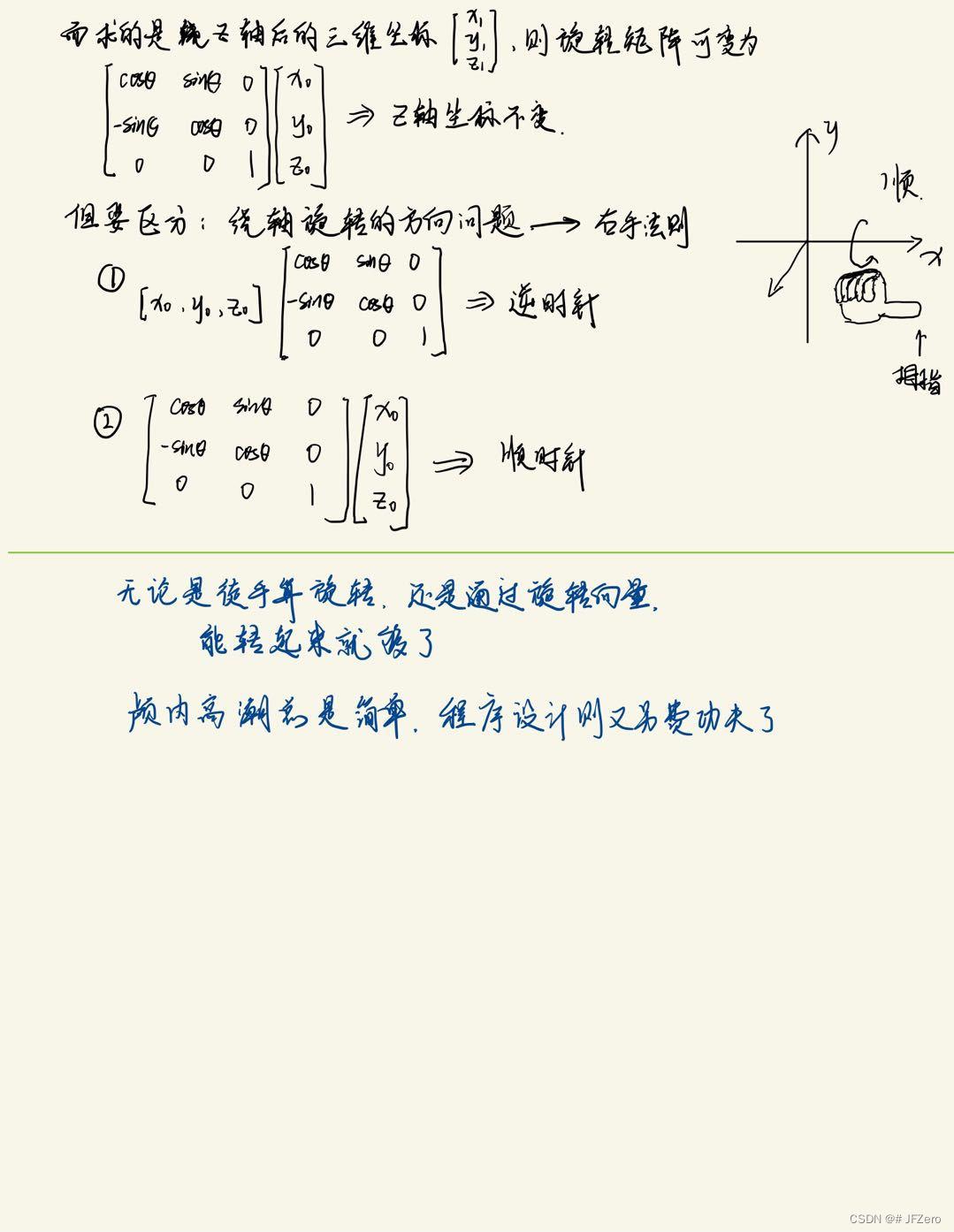
- 三维坐标的旋转关系计算
全流程解析笔记
关键代码实现
- 形成基础圆
# turtle画图的基础框架
import turtle,math
turtle.tracer(0) # 取消绘画过程,一次性显示全部
pen = turtle.Pen()
pen.hideturtle()
pen.penup()
# 甜甜圈参数设置
density = 36 # 基础圆由36个点围城
circle_r = 50 # 基础圆
inside_r = 100 # 内环半径
# 生成二维圆坐标
for i in range(density):
angle = i*math.pi*2/density
circle_x = inside_r+circle_r+circle_r*math.cos(angle)
circle_y = circle_r*math.sin(angle)
# 绘制二维原坐标
pen.goto(circle_x,circle_y)
pen.dot(5)
turtle.update()
turtle.done()
- 二维基础圆推出三维坐标,并用matplotlib验证三维形状
for i in range(density):
angle = i*math.pi*2/density
circle_x = inside_r+circle_r+circle_r*math.cos(angle)
circle_y = circle_r*math.sin(angle)
# 获取该点绕y轴的三维坐标
for T in range(density_T):
angle_T = T * math.pi * 2 / density_T
T_x = circle_x * math.cos(angle_T)
T_z = circle_x * math.sin(angle_T)
T_y = circle_y
T_point_pos.append([T_x, T_y, T_z])
- 三维坐标映射到二维平面(最简单的相机+xy平面,没窗口)
# 三维转二维——正视图
for point in R_point_pos:
x1 = camera_pos[2]*point[0]/(camera_pos[2]-point[2])
y1 = camera_pos[2]*point[1]/(camera_pos[2]-point[2])
z1 = point[2]
pen.goto(x1,y1)
dot_size = 5
pen.dot(dot_size,"white")
- 三维坐标绕轴旋转,然后再映射为二维
徒手算角度,且没使用atan2(),直接用条件判断周期和极值
# 三维绕x轴旋转
angle_r = 2
while True:
R_point_pos = []
angle_r += 5
for T in T_point_pos:
try:
if T[2]>0:
beta = math.atan(T[1]/T[2])
else:
beta = math.atan(T[1]/T[2])+math.pi
except:
if T[1]>0:
beta = math.pi/2
else:
beta = -math.pi/2
r = math.sqrt(T[1]**2+T[2]**2)
x = T[0]
y = r*math.sin(beta-math.radians(angle_r))
z = r*math.cos(beta-math.radians(angle_r))
R_point_pos.append((x,y,z))
# 三维转二维——正视图
for point in R_point_pos:
x1 = camera_pos[2]*point[0]/(camera_pos[2]-point[2])
y1 = camera_pos[2]*point[1]/(camera_pos[2]-point[2])
z1 = point[2]
pen.goto(x1,y1)
dot_size = 5
pen.dot(dot_size,"white")
turtle.update()
# time.sleep(0.05)
pen.clear()
del R_point_pos
turtle.clear()
完整的代码
import turtle
import math
turtle.tracer(0)
turtle.bgcolor("black")
pen = turtle.Pen()
pen.hideturtle()
pen.penup()
camera_pos = [0,0,800]
inside_r = 100
circle_r = 50
density = 15
density_T = 36
rotate_R = 36
T_point_pos = []
for i in range(density):
angle = i*math.pi*2/density
circle_x = inside_r+circle_r+circle_r*math.cos(angle)
circle_y = circle_r*math.sin(angle)
# 获取该点绕y轴的三维坐标
for T in range(density_T):
angle_T = T * math.pi * 2 / density_T
T_x = circle_x * math.cos(angle_T)
T_z = circle_x * math.sin(angle_T)
T_y = circle_y
T_point_pos.append([T_x, T_y, T_z])
# 三维绕x轴旋转
angle_r = 2
while True:
R_point_pos = []
angle_r += 5
for T in T_point_pos:
try:
if T[2]>0:
beta = math.atan(T[1]/T[2])
else:
beta = math.atan(T[1]/T[2])+math.pi
except:
if T[1]>0:
beta = math.pi/2
else:
beta = -math.pi/2
r = math.sqrt(T[1]**2+T[2]**2)
x = T[0]
y = r*math.sin(beta-math.radians(angle_r))
z = r*math.cos(beta-math.radians(angle_r))
R_point_pos.append((x,y,z))
# 三维转二维——正视图
for point in R_point_pos:
x1 = camera_pos[2]*point[0]/(camera_pos[2]-point[2])
y1 = camera_pos[2]*point[1]/(camera_pos[2]-point[2])
z1 = point[2]
pen.goto(x1,y1)
dot_size = 5
pen.dot(dot_size,"white")
turtle.update()
# time.sleep(0.05)
pen.clear()
del R_point_pos
turtle.clear()
turtle.done()

















 408
408

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









