







三维仿射变换矩阵可以用来描述三维空间中的平移、旋转和缩放操作。如果有一个三维坐标向量 P=(x,y,z,1)T,其中 T 表示转置,这个向量中的最后一项 1 是齐次坐标中的齐次项。
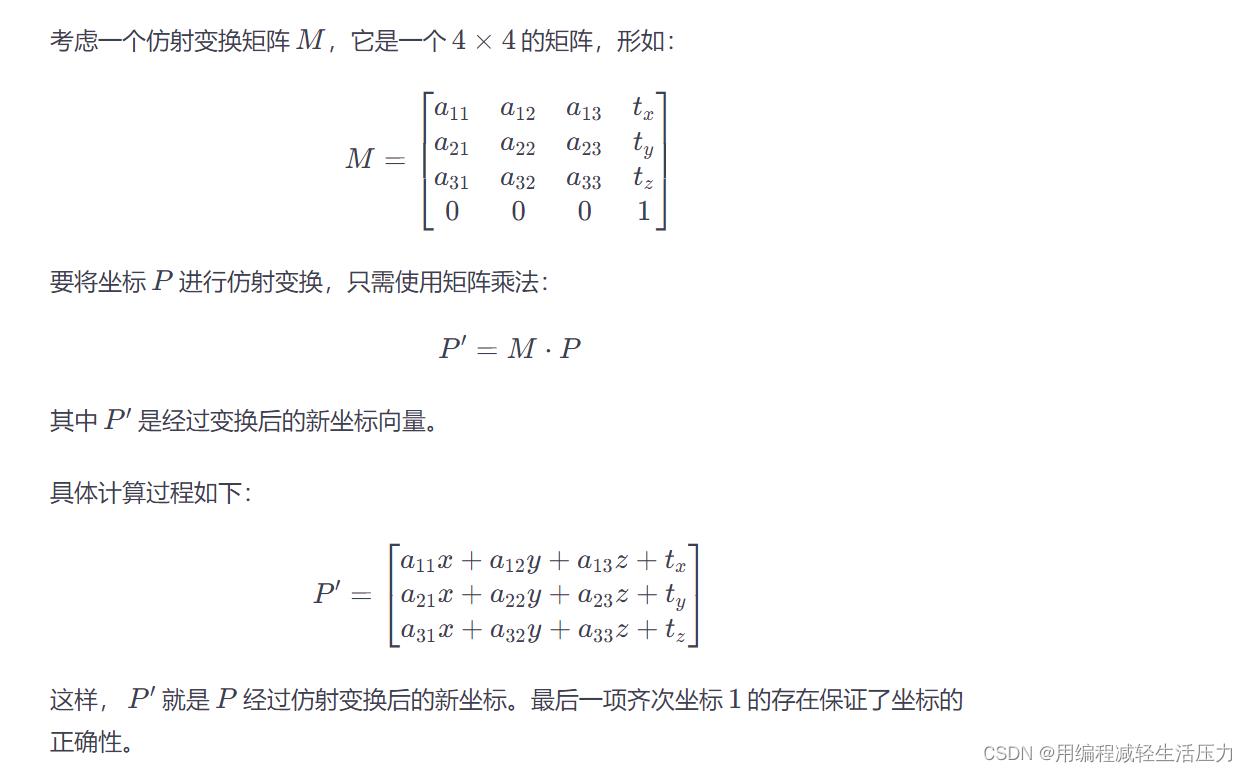
三维仿射变换矩阵是一个4x4的矩阵,通常表示为:
| a11 a12 a13 tx | | a21 a22 a23 ty | | a31 a32 a33 tz | | 0 0 0 1 |
其中,a11, a12, a13, a21, a22, a23, a31, a32, a33 表示旋转和缩放部分,(tx, ty, tz) 表示平移部分。最后一行 (0, 0, 0, 1) 是一个辅助行,用于表示齐次坐标。
这个矩阵描述了从一个坐标系到另一个坐标系的仿射变换,包括平移、旋转和缩放。在这个表示中,前三列(a11, a21, a31)、(a12, a22, a32)、(a13, a23, a33)表示旋转和缩放的部分,最后一列(tx, ty, tz)表示平移。最后一行表示齐次坐标的一部分,确保在矩阵乘法中的正确性。
这个矩阵的使用可以通过矩阵乘法将其应用于一个三维坐标,以执行仿射变换。
在三维仿射变换矩阵中,旋转和缩放是通过一个3x3的矩阵表示的,主要原因是在三维空间中,旋转和缩放是围绕坐标原点进行的线性变换。线性变换可以通过一个矩阵来表示,这个矩阵就是3x3的旋转矩阵。
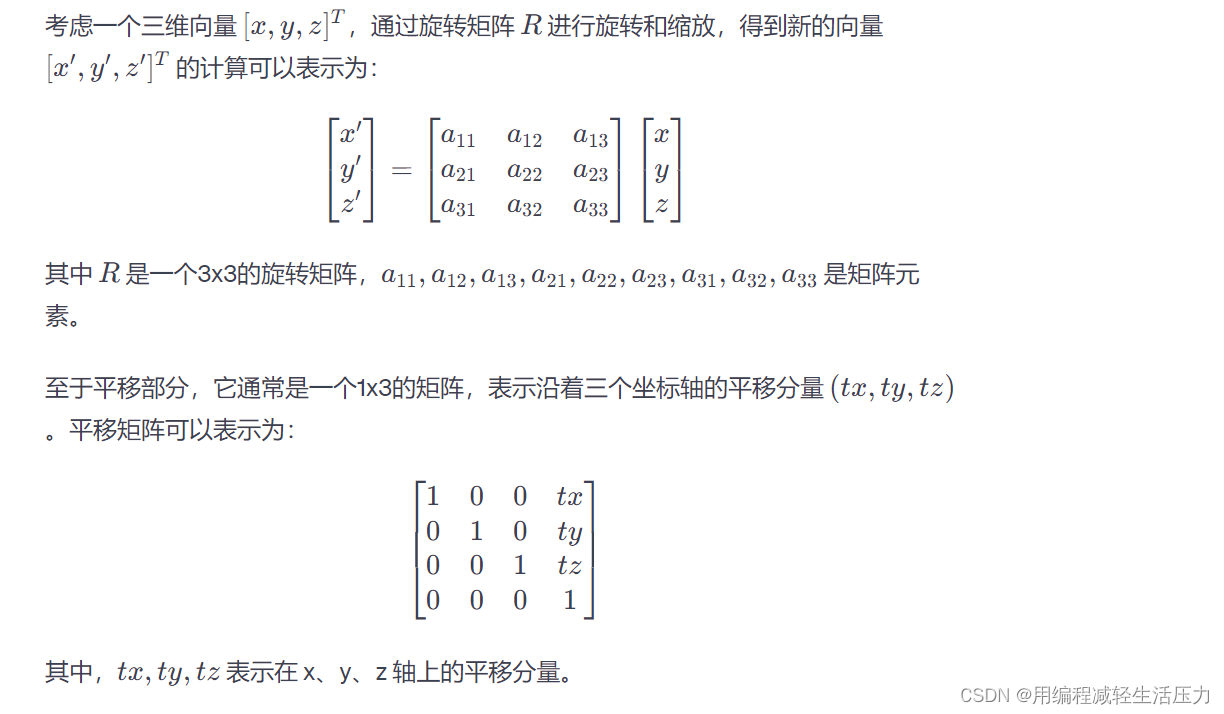
这样组合起来,我们得到了一个4x4的仿射变换矩阵,其中前三列是旋转和缩放矩阵,最后一列是平移矩阵。最后一行是辅助行,保证了齐次坐标的正确性。

















 2117
2117

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









