






 本文介绍了如何在ROS中利用RoboSense雷达节点和libpcap处理原始数据,通过message_filters实现激光雷达和图像数据的时间同步,并使用rosbag进行数据录制和查看。
本文介绍了如何在ROS中利用RoboSense雷达节点和libpcap处理原始数据,通过message_filters实现激光雷达和图像数据的时间同步,并使用rosbag进行数据录制和查看。
点云在ROS中的应用
用RoboSense雷达节点,加载pcap发布原始数据
mkdir -p pointcloud_ws/src
cd src
git clone https://github.com/RoboSense-LiDAR/ros_rslidar
cd ..
catkin_make
下载并安装libpcap-dev
sudo apt install libpcap-dev
修改slidar_pointcloud\launch\rs_lidar_32.launch文件中的pacp文件目录
<param name="pcap" value="/media/ghigher/KINGIDISK/Datasets/CH1激光雷达/RS_32_data.pcap"/>
运行launch文件
roslaunch rslidar_pointcloud rs_lidar_32.launch
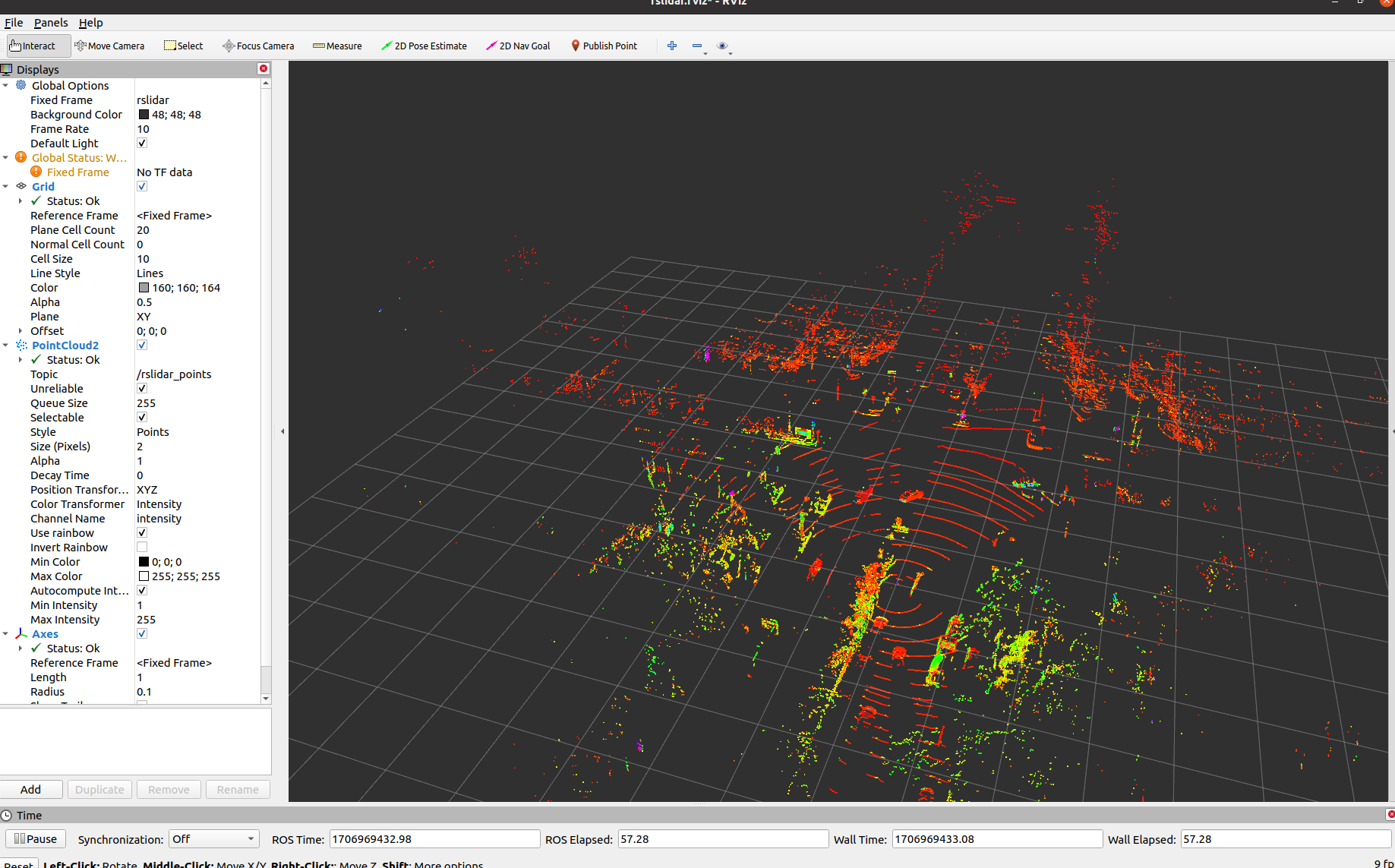
rosbag录制激光雷达数据
运行激光雷达数据
roslaunch rslidar_pointcloud rs_lidar_32.launch
查看话题rostopic list
/clicked_point
/cloud_node/parameter_descriptions
/cloud_node/parameter_updates
/diagnostics
/initialpose
/move_base_simple/goal
/rosout
/rosout_agg
/rslidar_node/parameter_descriptions
/rslidar_node/parameter_updates
/rslidar_packets
/rslidar_packets_difop
/rslidar_points
/temperature
/tf
/tf_static
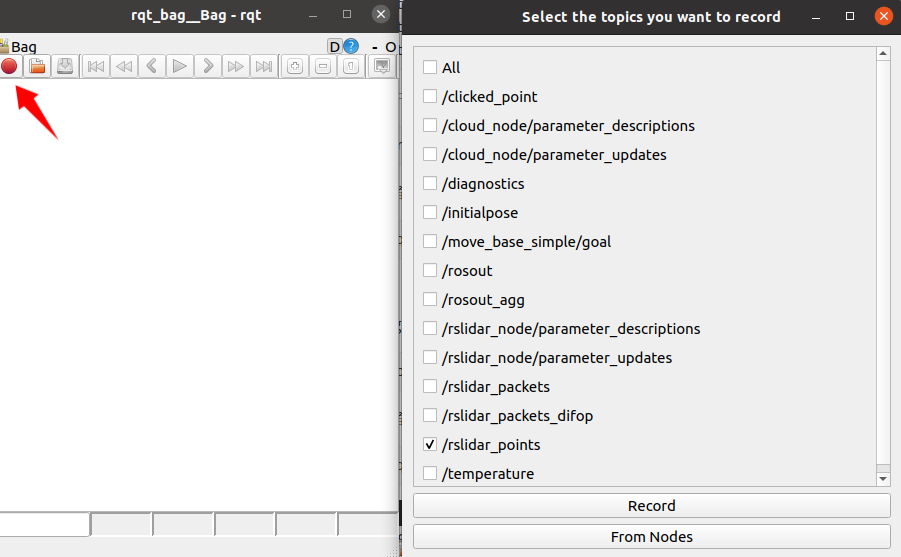
其中话题/rslidar_points就是需要录制的激光雷达数据
rosbag record -o lidar_point.bag /rslidar_points
或者通过可视化界面录制
rqt_bag
bag查看
rosbag play lidar_point_2024-02-03-22-19-29.bag
或者通过可视化界面查看
rqt_bag lidar_point_2024-02-03-22-19-29.bag

同步订阅雷达和图像话题
要求:
- 同步订阅激光雷达话题和图像话题
- 更改图像信息的header时间戳,与激光消息一致,并发布
- 录制发布的同步激光雷达和图像数据
ros官网提供了message_filters用于对齐多种传感信息的时间戳。
官方概述:http://wiki.ros.org/message_filters
message_filtersis a utility library for use with roscpp and rospy . It collects commonly used message “filtering” algorithms into a common space. A message filter is defined as something which a message arrives into and may or may not be spit back out of at a later point in time.
An example is the time synchronizer, which takes in messages of different types from multiple sources, and outputs them only if it has received a message on each of those sources with the same timestamp.
#include "ros/ros.h"
#include <rosbag/bag.h>
#include <sensor_msgs/PointCloud2.h>
#include <sensor_msgs/Image.h>
#include <message_filters/subscriber.h>
#include <message_filters/time_synchronizer.h>
#include <message_filters/sync_policies/approximate_time.h>
#include <iostream>
std::string img_topic = "/ccf_pc/_img";
std::string point_topic = "/ccf_pc/_points";
rosbag::Bag bag_record; // bag文件记录
ros::Publisher img_pub;
ros::Publisher pointcloud_pub;
typedef message_filters::sync_policies::ApproximateTime<sensor_msgs::Image, sensor_msgs::PointCloud2> testSyncPoicy;
// 回调函数
void callback(const sensor_msgs::ImageConstPtr &image, const sensor_msgs::PointCloud2ConstPtr &point)
{
sensor_msgs::Image img_temp;
img_temp = *image;
img_temp.header.stamp = point->header.stamp; // 复制时间戳
// 直接写入bag文件
bag_record.write(img_topic, image->header.stamp.now(), image);
bag_record.write(point_topic, point->header.stamp.now(), point);
std::cout << "encoding..." << image->encoding << std::endl;
// ROS_INFO("encoding: %s", image->encoding);
ROS_INFO("step: %d", image->step);
ROS_INFO("height: %d", image->height);
ROS_INFO("width: %d", image->width);
//实时发布
img_pub.publish(image);
pointcloud_pub.publish(point);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "time_sync");
ros::NodeHandle n;
bag_record.open("/home/ghigher/workplace/pointcloud_ws/src/time_sync_demo/bag/record.bag", rosbag::bagmode::Write); //写入路径
//发布的话题
img_pub = n.advertise<sensor_msgs::Image>(img_topic, 1000);
pointcloud_pub = n.advertise<sensor_msgs::PointCloud2>(point_topic, 1000);
message_filters::Subscriber<sensor_msgs::Image> img_sub(n, "/zed/zed_node/left/image_rect_color", 1); //topic1输入
message_filters::Subscriber<sensor_msgs::PointCloud2> pointcloud_sub(n, "/rslidar_points", 1); //topic2输入
message_filters::Synchronizer<testSyncPoicy> sync(testSyncPoicy(10), img_sub, pointcloud_sub); // 同步
sync.registerCallback(boost::bind(&callback, _1, _2));
ros::spin();
ros::shutdown();
}
roscore
rosrun time_sync_demo time_sync
运行bag文件
rosbag play seu.bag
查看bag
rqt_bag record.bag

可以看出图像与激光雷达时间戳大致对齐,小部分差异是由程序bag写入时的先后顺序导致的。

















 2140
2140

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









