






1.状态空间模型建立
一个系统的描述通常有两种,第一种就是我们经典控制理论中所说的,基于输入,输出模型的外部描述,它相当于把我们的整个系统看作一个黑箱子,反映的只是我们输出和输入之间的关系,像传递函数和高阶微分方程。第二种就是现代控制理论的基础,状态空间模型,它由状态方程和输出方程组成,状态空间模型能够反映系统的内部结构和内部变量。其中状态方程反映的是系统内部变量和输入变量之间的一个动态关系,而输出方程反映的是输出和系统内部变量,输入变量之间的关系。这样说起来,肯定特别抽象,下面举个例子就好理解了。
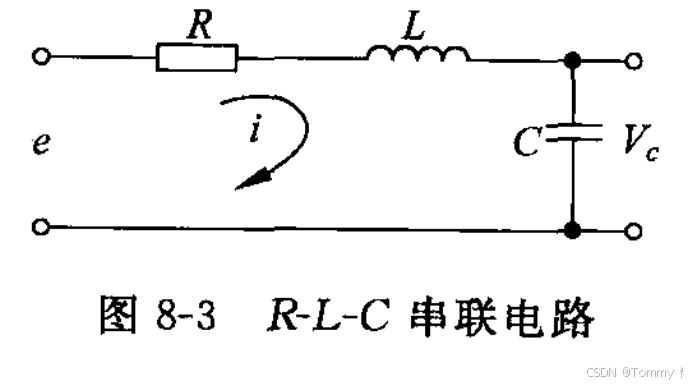
上图是一个简单的RLC串联电路,电路的输入是e,输出是Vc,根据回路电压定律,容易得出
(1)
电路输出量为,转换一下得到
,代入第一个式子,就可以得到输入-输出模型
(2)
设为电感器电流
,
为电容器电压
。
那么可以得到状态空间模型
(3)
(4)
(5)
将模型化简写成矩阵-向量形式就是
其中为
,
为
,
为
,至此状态空间模型就算建立完成了,如果我们知道输入电压
,电容初始电压
,电感初始电压
,可以很快求出输出
。上面第一个式子就是状态方程,第二个就叫作输出方程。
2.基于状态空间模型的系统分析
2.1 稳定性
1892年,俄国学者李雅普诺夫建立了基于状态空间描述的稳定性理论。其所提出的稳定性是关于系统在某一点的平衡状态的稳定分析,可以反映出系统在平衡状态附近的动态行为。
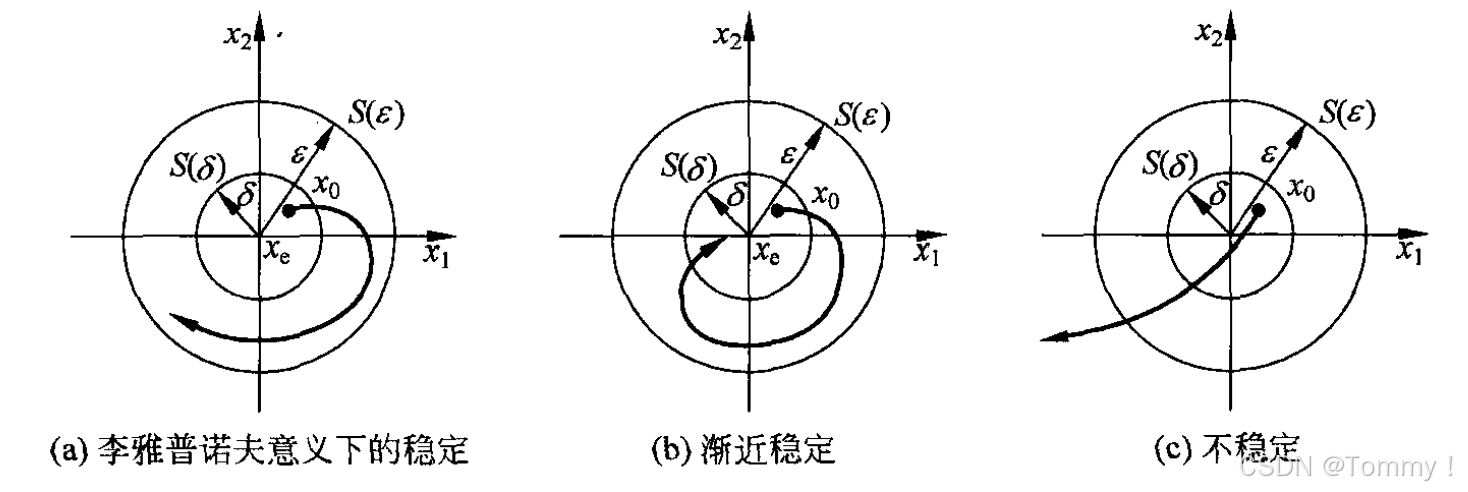
李雅普诺夫意义下的稳定。如上图(a),意思是对于任意小的,都存在一个
,满足当
s,随着时间的推移,
始终小于等于
(也就是说始终不会超出外围那个大圆)。
渐进稳定。如上图(b),意思是对于任意小的,都存在一个
,满足当
s,随着时间的推移,
不仅是一直小于等于
,并且渐渐的
。
不稳定。如上图(c),意思是对于不论多小,只要
内有一条从
出发的轨迹,随着时间的推移,
会跨出
,就可以说系统在该平衡点是不稳定的。
李雅普诺夫第一法:一般适用于线性系统或者能够被线性化的非线性系统。线性系统渐进稳定的充分必要条件是:系统矩阵A的所有特征值全部位于复平面左半部。证明的话,很多书上都有,这里就不赘叙了。
李雅普诺夫第二法:从物理学角度来看,如果一个系统储存的能量随着时间的推移而衰减,系统肯定会达到稳定的状态。但由于一些复杂系统的能量函数并不好表示,因此李雅普诺夫引入了广义能量函数。
下面就是李雅普诺夫第二法稳定性的相关定理,先将系统的状态方程设为,其平衡状态满足
,把状态空间原点作为平衡状态,并假设系统在原点附近存在
对
的连续的一阶偏导数。
定理一:如果正定,
负半定,并且在非零状态恒为0,则原点是在李雅普诺夫意义下稳定的。
定理二:如果正定,
负定,则原点是渐进稳定的。
定理三:如果正定,
正定,则原点是不稳定的。
正定的意思在其定义域S内满足
,且
,其英文简称叫做PD。
负定的意思在其定义域S内满足
,且
,其英文简称叫做ND。
正半定的意思就是虽然满足
,但是在S域内某些状态处也能使得
,而其它状态满足
,其英文叫做PSD。
负半定的意思就是虽然满足
,但是在S域内某些状态处也能使得
,而其它状态满足
,其英文叫做NSD。
这种方法的适用范围比较广,对于非线性系统都能应用,并且不需要去求解系统状态方程的解。但是缺点在于,如何选择一个合适的是一个很大的问题,且没有固定的方法来帮助我们找到合适的
。
2.2 可控性
现代控制理论用状态方程和输出方程描述系统,输出和输入构成系统的外部变量,而状态为系统的内部变量,这就好比是一块集成电路芯片,内部结构可能十分复杂,但外部引脚就十几个或者几十个,对内部电路中的物理量的测量和控制都只能通过外部的这些引脚来进行,那么能否实现测量和控制就是我们要判断系统是否具有可空性和可观测性的前提。
如果一个系统所有状态变量的运动都可以通过有限的控制点的输入来使其由初始状态达到任意设定的最终状态,那么就可以说这个系统是状态可控的,否则系统就是不完全可控的,简称系统不可控。
可控性也分为状态可控性和输出可控性,一般来说系统的可控性指的都是状态可控性,而状态可控性只与状态方程有关,与输出方程无关。
判断依据:假设一个系统的状态方程为,它的能控矩阵是
它的状态能控充分必要条件是或者是
。
2.3 可观性
如果系统的所有状态变量的任意形式的运动均能够通过有限的测量点的输出完全确定下来,那么就可以说系统可观测。如果一个系统中的某个状态变量能够直接用仪器测量出来,那么它必然是可观测的。
判断依据:假设一个系统的状态方程为,输出方程为
,它的能观矩阵是
它的系统可观测的充分必要条件是。
3.实例
实例中我准备使用以前上自控课看过的一本书中为例子,展示状态空间模型在实际系统中的应用。

















 3734
3734

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









