







一、系统设计
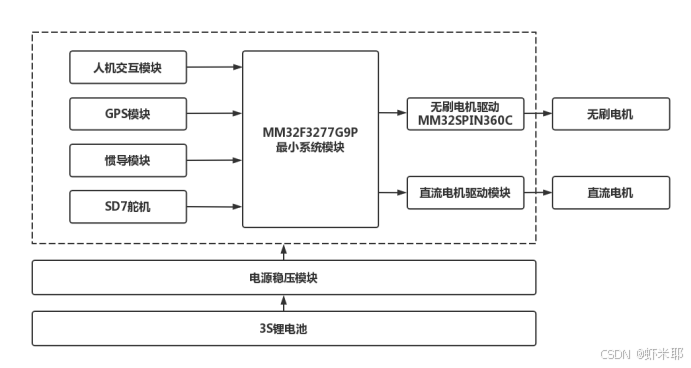
1、微控制器: MindMotion 微控制器
2、整个系统主要包含以下几个模块:
(1)单片机最小系统板;
(2)双频GPS模块;
(3)惯导模块;
(4)电机驱动模块;
(5)无刷电机;
(6)稳压电源模块;
(7)人机交互与调试模块。
3、任务要求:使用室外操场跑道,通过GPS获取经纬度数据,实现小车在全球范围内的亚米级定位,并进行路径规划,实现点与点之间的自由移动,完成小车沿操场赛道,或者封闭环形街道运行一周。
二、机械设计
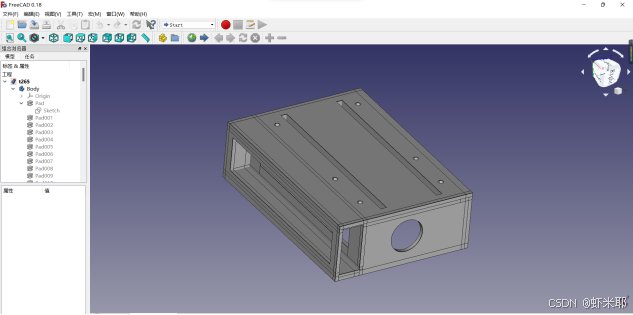
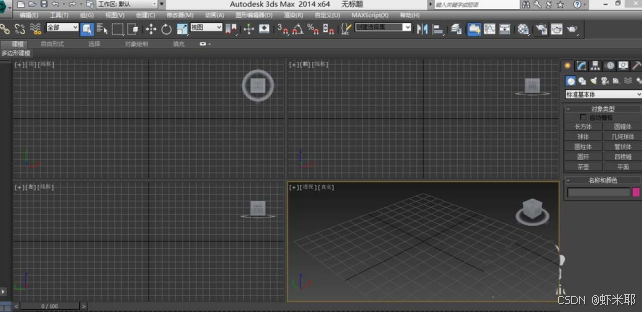
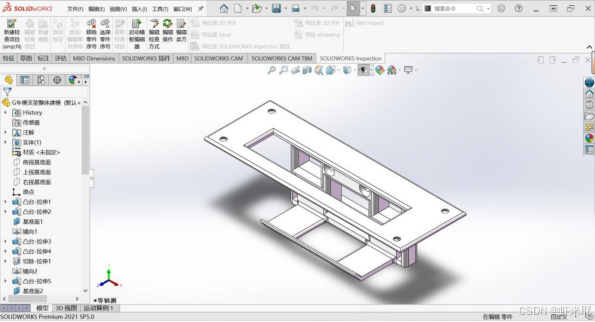
在进行车模机械结构设计的时候,我们不仅考虑了市面上能购置的碳纤维、亚克力板等,综合实际测试,车模整体更多的是3D打印的架构,这种架构可自主建模设计,更具创新性,实用性。我们在开发的时候考虑了三款软件,分别是SolidWorks、3DMAX和FreeCAD。三款软件各有千秋,操作非常简单易用,各种操作符合大部分人的操作习惯,功能满足绝大部分工业设计需要,普及程度很高,包容性好,和其他软件的互相导入导出协作都做得很好,并且简单的渲染、仿真、模具设计等都很容易上手,应用比较多的模块有三维模块和二维模块,也有像运动仿真等外挂模块。我们采用的设计多基于FreeCAD,更好上手。
(1)Free CAD软件
(2)3DMAX软件
(3)SolidWorks软件
三、防撞设计
任务要求小车在操场运行一周,且可更换基于MindMotion的MCU的无刷驱动方案,无刷电机的速度比起有刷直流电机速度是直接提了个挡,轻松达到10m/s,且这种速度对于L车模来说更提不上极限,但如若发生碰撞,对车身的损坏是非常严重的,考虑到车模的昂贵和维修的成本,我们必须做好完全的防撞准备。
最终方案选择铝板和防撞海绵来设计防撞结构,海绵可以给到一定的缓冲作用,铝板材质足够坚硬,可以抵抗较强的碰撞,且在交流中发现L车模的质量问题,车底板在发生碰撞后会出现断裂情况,但规定是不允许更改原厂车模配置,为了避免这种断裂情况,我们对车底板进行加固,我们购置一块铝板自行打孔,将其加固在车模底部,与前面防撞结构相连,此时,车模的防撞设计基本完成, 且铝板的重量降低车身重心,在高速转弯的时候不容易侧倾。


















 194
194

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











