






1.原理剖析
原地掉头,洋名:Vehicle Origin Turn,依赖于四电机架构和强大的四驱矢量控制算法,车辆能够在原地并且高附着路面完成360度大掉头。原地掉头起源于新能源一哥BYD,发扬光大于后起之秀Xiaomi。由于车辆原地掉头工作时,轮胎受到纵向力、侧向力以及回正力矩,且处在非线性区,在加上车身存在较大质心侧偏角且不可忽略,所以乍一看表现出了积极复杂的控制难度。
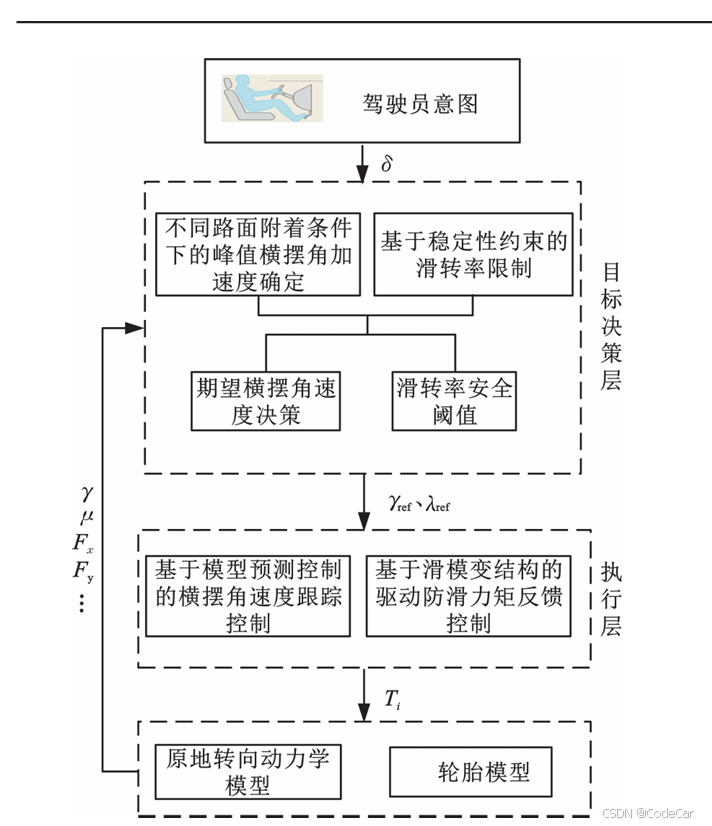
学术界严谨求实,通过咔咔一顿推导,基于车辆动力学模型,利用MPC等高级算法,将整车横摆角速度作为控制目标,得到整车的横摆力矩,并均分给四个电机,从而实现原地掉头。
工程界简单粗暴,通过咔咔一顿标定,基于运动学理论控制四个电机转速,从而实现原地掉头。
2.算法实现
2.1 基于动力学的横摆角速度控制
开发进行中。。。。。。
感兴趣的自己推导实现,论文如下:

2.2 基于运动学的电机转速控制
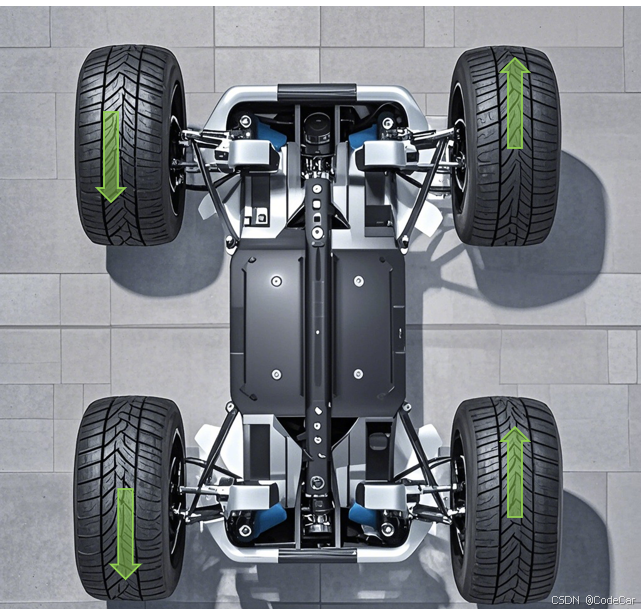
由于四电机可以独立驱动,只需要控制一侧轮子按照同一个速度和方向旋转,另一侧轮子按照同样的转速但相反的方向旋转即可,按照运动学关系,车辆必能实现原地掉头。
当然目标速度最好是跟油门开度做一个对应关系,另外,速度闭环控制算法也多种多样,比如PID、SMC。PID一定要考虑好积分饱和现象,否则车辆在掉头的时候,因为路面附着系数的变大突然卡住,当再次恢复运动的时候会发生失稳风险;而滑模控制也要处理好扭矩抖震。具体的细节不在这里展开,后期会专门出控制算法篇,详细介绍每一种算法的设计以及应用。
3.整活展示
感兴趣的请移步破站观看:
https://www.bilibili.com/video/BV1y2B2YrE6f/?spm_id_from=333.999.0.0
插一个说明:
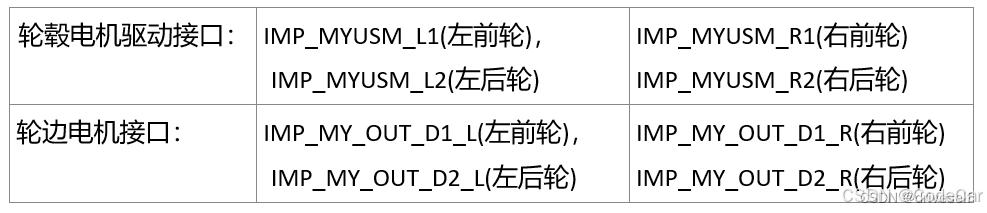
Carsim没有现成的电动四驱架构,想要做四驱控制可以选择以下接口,轮毂电机或者轮边电机。另外,Carsim有的版本中,轮边电机可能只有两个接口,这个无妨,那就使用轮毂电机即可。
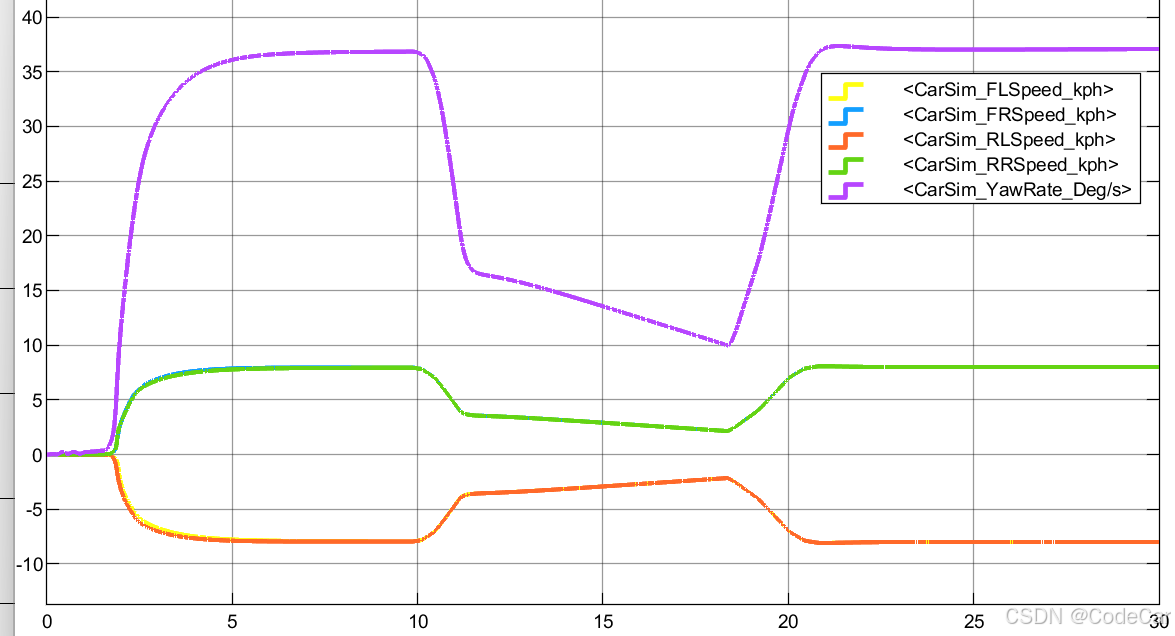
简单分析一下:可以看出轮速在精准的控制下,呈现正负的对称关系,横摆角速度跟轮速呈现出正相关关系,目标轮速越大,横摆角速度越大。
4.进一步拓展
以上只是原地掉头的最简单的一种模式,像是最近小米演示的“圆规掉头”,其难度相对较大,这不光需要控制电机扭矩,还要控制IPB的制动力。其控制目标大概可以猜一下:需要先保证圆心点轮子抱死,再控制另一个前轮的制动力和后轮的电机扭矩,从而让车辆完成摆动。各位如果感兴趣可以自己试一试,如果你有好的想法,欢迎评论区交流!

















 6681
6681

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









