







【机器人运动学】——刚体转动的拆解
一、转动
- 物体转动的注意事项:
(1)多次转动需要确定先后顺序,转动顺序不能互换。
(2)旋转的转轴需要确定清楚。
- 物体转动R的两种拆解方式
(1)对方向固定不动的转轴:FIxed angles (XYZ)→ 左乘基
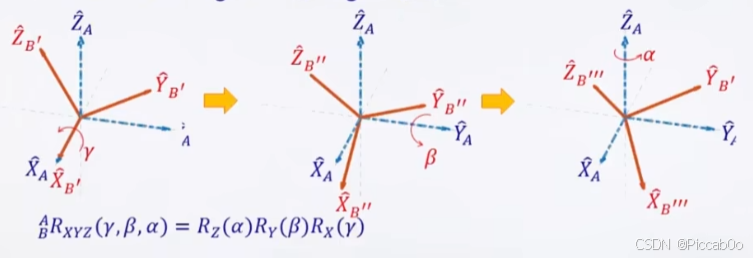
- 注意1:由旋转矩阵R也可以推算出旋转角度。
- 注意2:式子乘个P,就更直观了。先操作x,之后结果再操作y,结果再操作z。
(2)对转动的frame当下的转轴:Euler angles (ZYX)→ 右乘联体
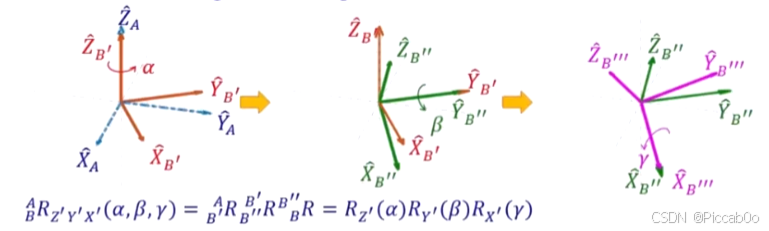
- 注意1:这里可以这么想,把一个向量先mapping(转换)到第一个frame,再到第二个,再到第三个。那么相当于,整体是从最后一个mapping回来的,只有这样才能保证两种拆解方式得到的结果一致。
- 注意2:这也就说明Fixed angle的正转和Euler angle的反转可以得到一样的解。
(3)对转动的frame当下的转轴,也可以利用ZYZ的方式进行拆解。
二、刚体运动状态的表达
- 齐次变换矩阵T:将姿态和位置统一起来。
B A T = [ − B A R − A P B o r g 0 0 0 1 ] {}_B^AT= \begin{bmatrix} -& {}_B^AR&-& {}^AP_{Borg} \\ 0 & 0 & 0 & 1 \end{bmatrix} BAT=[−0BAR0−0APBorg1]
- 对于齐次变换矩阵T而言,其也可以用于描述frame间的变换mapping情况(相对空间状态),也可以用于向量/点的移动转动操作operate。
- 注意1:这里的齐次变换,应该是先转动再移动。
- 注意2:很容易想,点和向量的移动和转动,相当于基frame的反动和反转。
- 齐次变换矩阵的运算:
(1)连续运算:ABC系联乘
(2)反矩阵:由
B
A
T
A
B
T
=
I
4
×
4
{}^A_BT{}^B_AT=I_{4\times4}
BATABT=I4×4可得,

(3)B对A的转轴旋转:premultiply,左乘
(4)B对B的转轴旋转:postmultiply,右乘


















 2500
2500

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









