









文章目录
前言
本博客依据nupan官方教程文件(./nuplan-devkit/tutorials/nuplan_framework.ipynb)介绍planner的训练和仿真评价。希望可以帮助到大家,欢迎大家交流学习!
一、训练与仿真框架
下面是nuplan官网给出的框架:
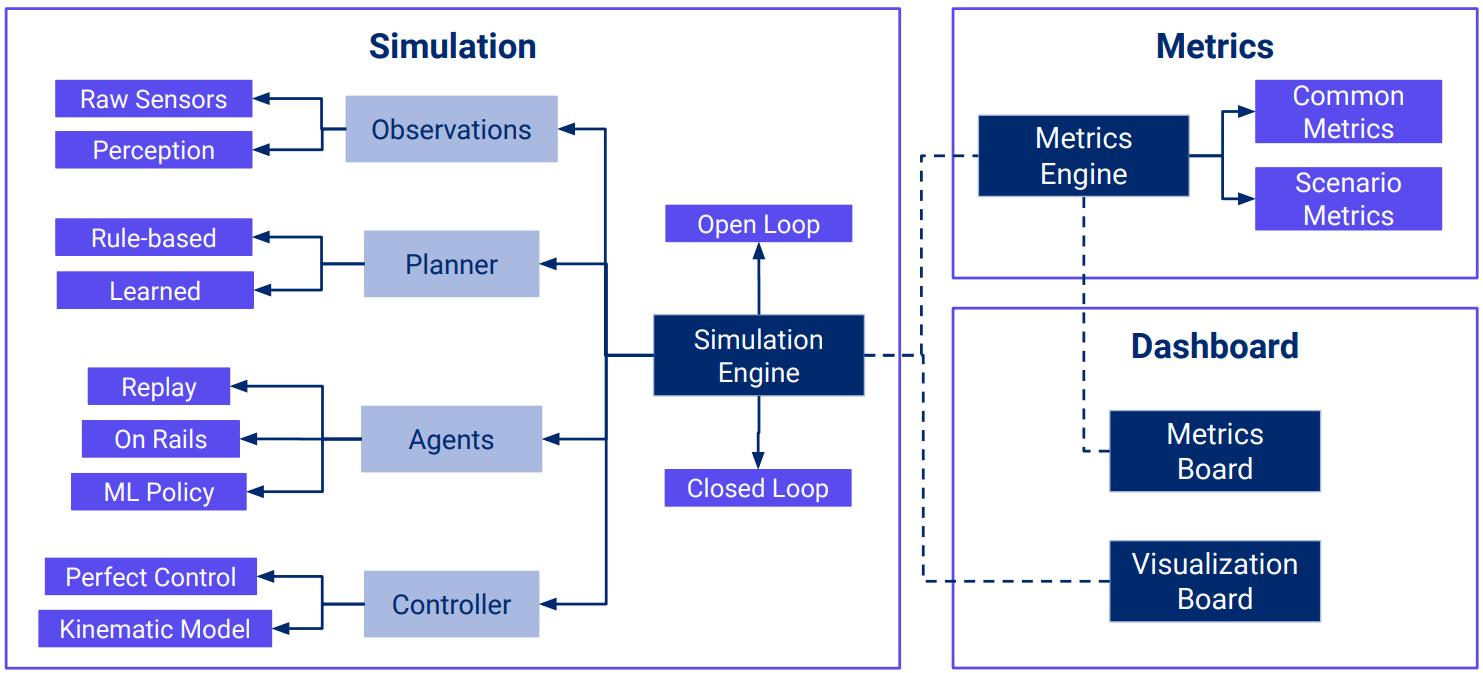
值得关注的是,仿真支持三种仿真方式:开环仿真、无反应闭环仿真和有反应闭环仿真。
在后面仿真方面我们会再次提到以下三个参数,为了更好的让大家理解,我现在这简要介绍一下:
open_loop_boxes:静止的障碍物、按固定路线行驶且不避让的车辆。(静态障碍物避让、基础轨迹跟踪)
closed_loop_nonreactive_agents:按规则变道的车辆,但不会因主车切入而减速。(动态环境下的局部路径规划(无交互))
closed_loop_reactive_agents:主车变道时主动减速让行的车辆,或行人根据车辆行为调整过马路时机。(多车博弈、交叉路口通行、行人交互)
二、训练planner
1.数据集下载及存放
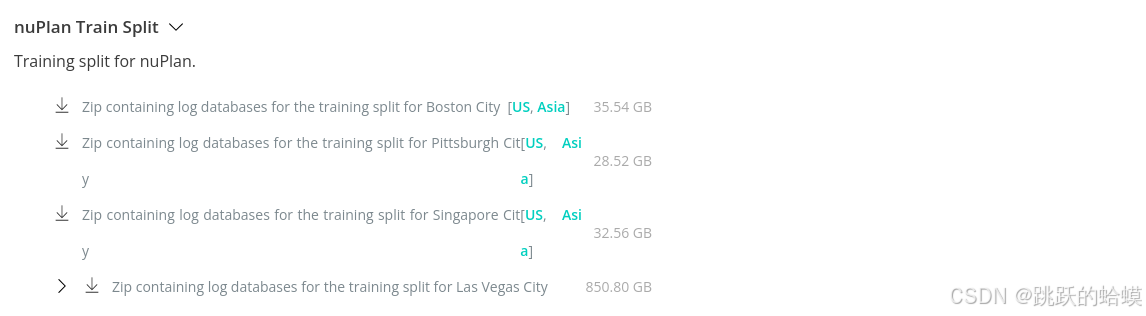
在nuplan官网下载训练集。(仅仅是为了学习,我只下载了Boston的数据)
在 ./nuplan-devkit/nuplan/dataset/nuplan-v1.1目录(根据自己nuplan-devkit的存放目录更改,dataset文件夹以及该文件夹下的文件是我们自建的数据文件,我的上个博客有提到)下建立trainval文件夹,将下载的训练数据(.db)解压到trainval文件夹中。
2.开始训练
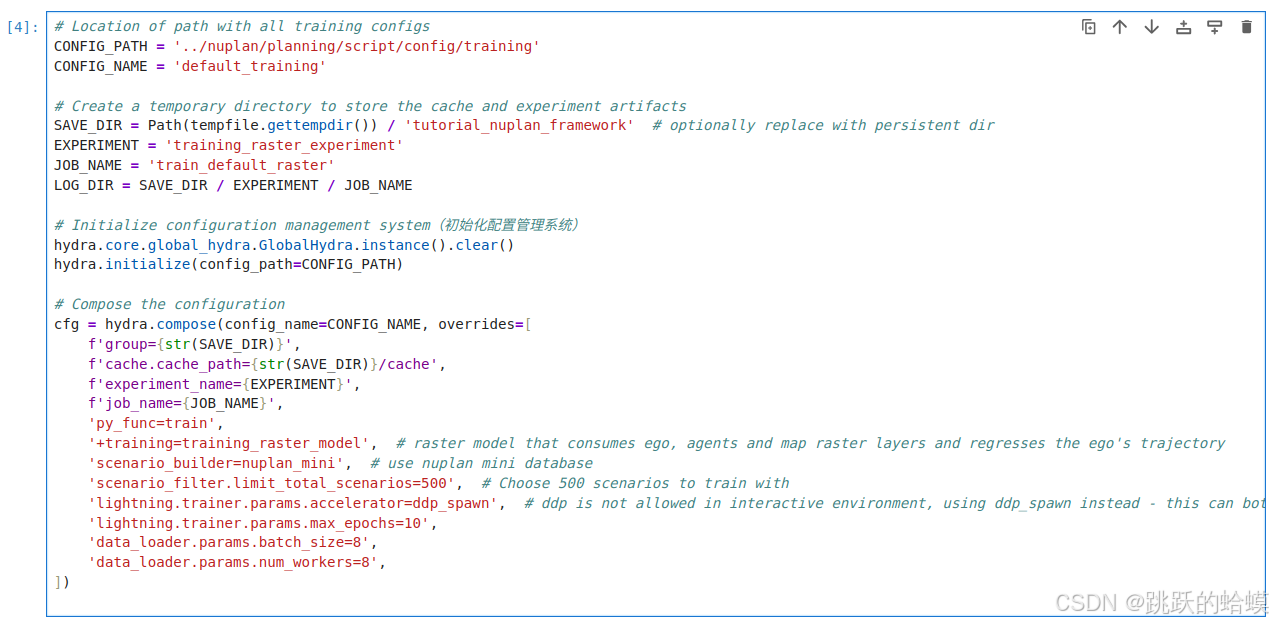
这是训练的关键代码,nuplan官方是通过hydra工具管理训练(hydra工具目前我还不太会用,还在学习,有机会出个使用教程。)。最终的实验数据会存放在/tmp/tutorial_nuplan_framework路径下。
该训练实际并非是从零开始训练的,而是在Resnet的预训练模型之上进行的。在这里为了方便实验,不追求性能,禁用了预训练模型。代码改写如下:
from nuplan.planning.script.run_training import main as main_train
cfg.model.pretrained = False #禁用预训练模型
# Run the training loop, optionally inspect training artifacts through tensorboard (above cell)
main_train(cfg)注:我在这里遇到了报错:AttributeError: module 'PIL.Image' has no attribute 'ANTIALIAS'。这是由 Pillow (PIL) 库版本过高 导致的兼容性问题(ANTIALIAS 在 Pillow >=10.0.0 中被弃用)。以下是具体解决方案:
pip install pillow==9.5.0 在环境中安装好后,要重启ipynb内核!
训练成功结束后会输出如下,表示已存储训练数据:

二、仿真planner
1.仿真类型及其评价指标
仿真类型主要为两类:开环仿真和闭环仿真。闭环仿真的优势在于,模拟的反馈回路能够更深入地评估ego的policy,因为复合误差可能会导致未来的观测结果与实际情况严重偏离。以下是nuplan仿真平台开环和闭环的本质不同点:
开环 无响应:自车和环境车辆的行为都是通过回放log日志加载得来。
闭环 有响应:自车和环境车辆都是基于一个规则或者学习的策略做决策。
此外,评价指标有:
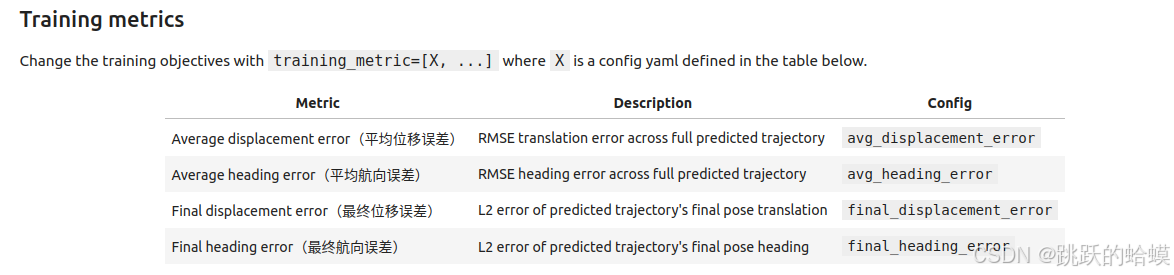
注:可在训练阶段配置。
2.开始仿真
以下是仿真的关键配置代码:
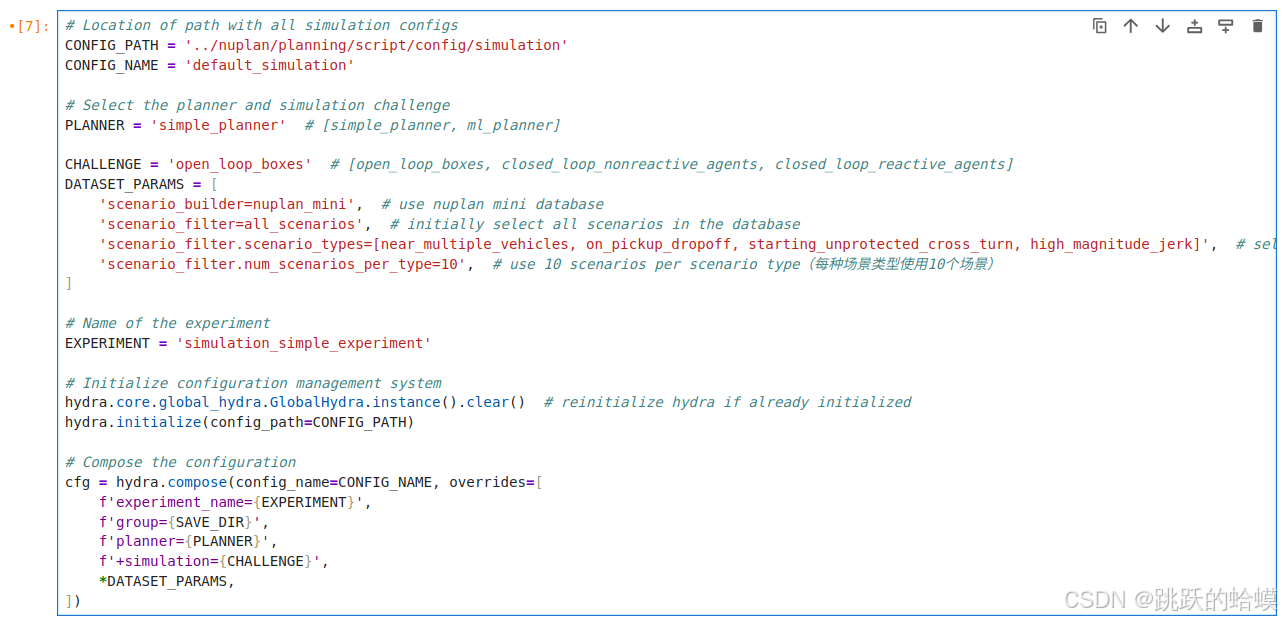
其中可通过修改CHALLENGE参数配置仿真类型,PLANNER参数用于选择仿真的规划模型。
配置完成后,开始仿真:

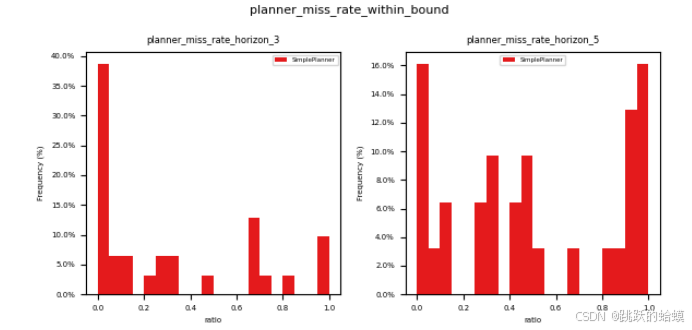
运行成功后会得到如下的指标结果:
3.可视化指标和传感器(nuboard)
有两种方法可以完成。
法一在笔记本文件中配置hydra,把nuboard加载到新的页面(官方推荐):
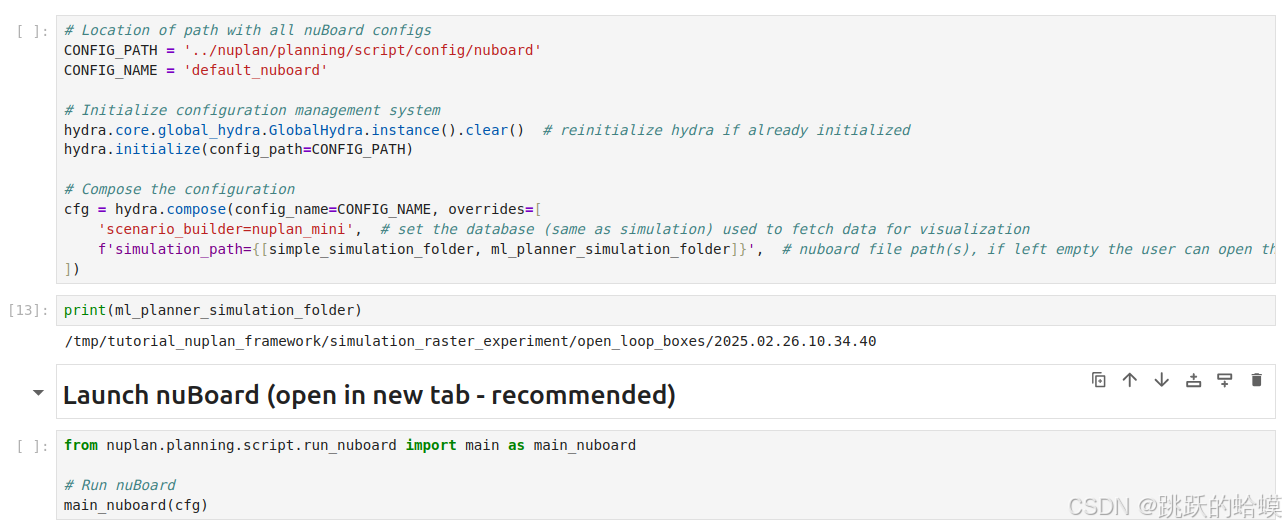
法二直接运行nuboard文件:
python nuplan/planning/script/run_nuboard.py运行后会跳转到nuboard页面 :
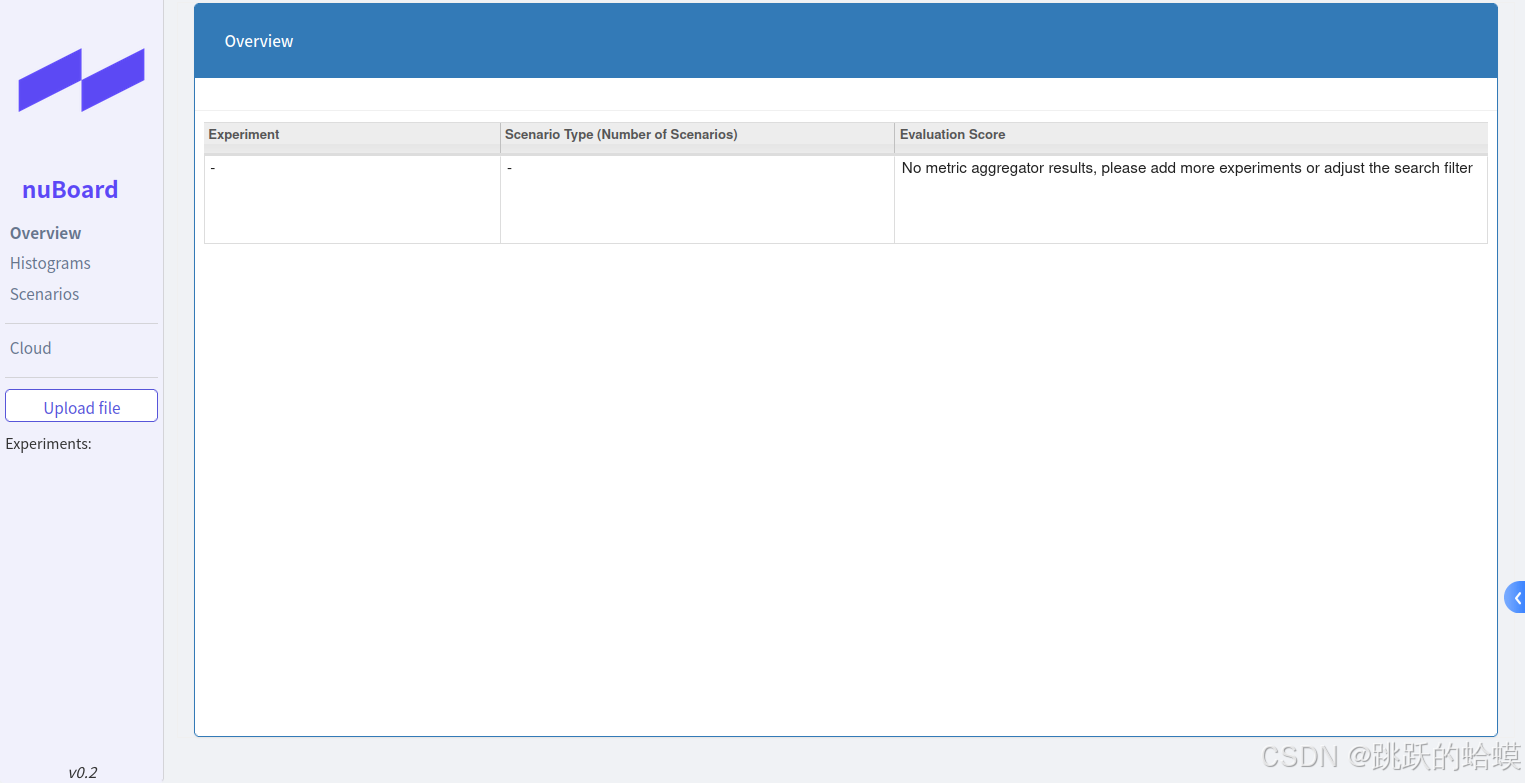
在Upload file选项处选择自己的.nuboard文件。
注:在运行run_nuboard.py文件时可能会报错:
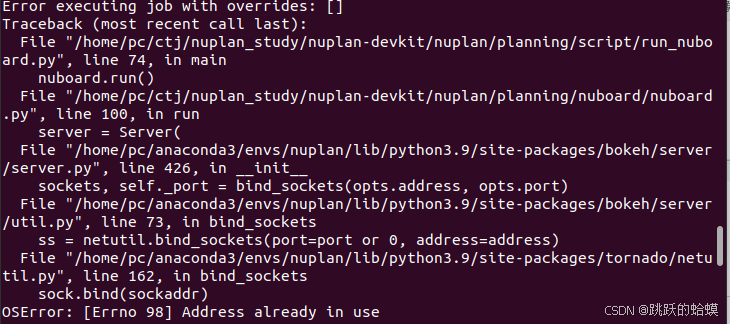
这是由于端口5006被占用,我们只需要查看占用的进程,并kill后,再次运行即可成功。
sudo lsof -i :5006 #查看5006端口信息
总结
谢谢大家的观看,本博客仅仅介绍了自己通过对教程文件的学习和总结。欢迎大家积极交流

















 667
667

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









