







surroundocc需要nuPlan数据集
0. 前言
1. nuplan介绍
是世界第一个针对自动驾驶规划方法测试的开源数据集(发布于2021年),收集了波士顿、匹兹堡、拉斯维加斯和新加坡这 4 个城市收集了大约 1300 小时的驾驶数据。
最直接就是看nuplan官网的介绍,和paper。如果只想大概扫一眼这里还有篇中文翻译的自动驾驶轨迹规划之nuplan数据集。
一句话总结就是:和nuScenes同一家公司发布的,nuPlan是首个面向planning的大规模自动驾驶基准数据集,不仅包括大量的1200小时多城市的实车驾驶数据,还提供了一整套开环/闭环仿真、多种评价标准、ML规划器开发工具及可视化工具。
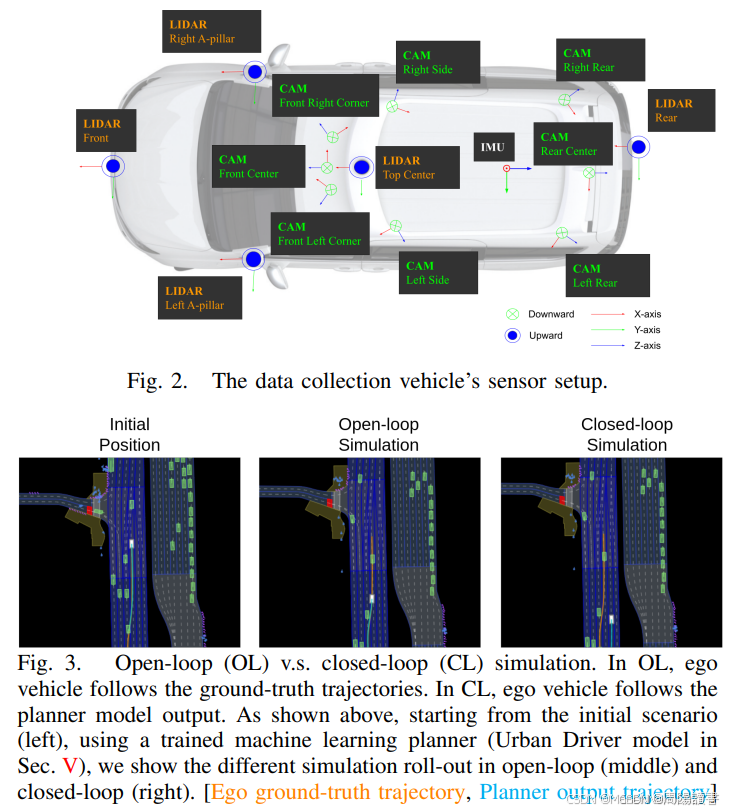
nuplan_v1.1数据量是1.8TB,这还不包括原始的传感器数据(摄像头、激光);它也有个mini版,nuplan_v1.1_mini,解压后是13g左右,7h的驾驶数据覆盖了大部分场景,但是原始传感器数据仍旧是非常大的。下图就是它的采集车(包含8个相机,5个激光,1个IMU)及数据可视化结果:
数据下载及环境安装
数据的使用基于官方的工具nuplan-devkit就行,数据下载直接上nuplan官网注册登陆后就能下载,学习只用nuplan_v1.1_mini版就够了,下载时选择Asia节点(国内会更快点)。如果是从头安装,具体的细节这部分有篇博客下载数据教程及环境配置_csdn中文写得很详细了,就不重复写了,感谢原博主X.ZHANG0825。另外官网也有对应环境安装和数据下载的教程nuplan-devkit Installation。
虽然基于 ML 的运动规划器越来越多,但缺乏既定的数据集、模拟框架和评价指标,这也限制了该领域的进展。现有数据集(Argoverse、Lyft、Waymo) 主要侧重与对其他代理的短期运动预测,而不是自我车辆的长期规划。这导致之前的方法大多使用基于 L2 指标的开环评估,不适用于合理评估长期规划。为了解决上述问题,nuplan除了提供大规模实车数据集,还提供了基于学习的训练框架来开发基于机器学习的规划器、轻量级闭环模拟器、运动规划评价指标和可视化工具。
下图为其训练框架。

2. 安装
2.1 下载开发包devkit
首先,cd到希望的安装目录,然后在终端中运行以下代码:
git clone https://github.com/motional/nuplan-devkit.git
cd nuplan-devkit
2.2 安装指定版本的python
官方使用devkit 在 Ubuntu 上针对 Python 3.9 进行了测试,为了使用不出现bug,推荐安装python3.9,使用以下命令即可实现安装:
conda create -n nuplan python=3.9
conda activate nuplan
python -m pip install pip==24.0 -i https://pypi.tuna.tsinghua.edu.cn/simple
git clone https://github.com/motional/nuplan-devkit.git && cd nuplan-devkit
pip install -e .
pip install -r ./requirements.txt
pip install -r requirements_torch.txt


















 8271
8271

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











