







1.
总述
UR
机器人与
PC
通讯主要介绍
UR
机器人与工控机,具备
TCP/IP
通讯模块的
PLC
以及嵌
入式系统等等如何进行通讯。大家可以
根据实际需求选
择最佳的通讯方式
。对于每种通讯方式的详细介绍,本文不涉及,需要的读者可以登录
UR 官网技术支持
的
How-to articles
中进行搜索和下载。
早期版本的
UR
机器人版本提供了
C-API
接口,目前版本的
UR
机器人(
CB3
及之上)不
再支持;关于
ROS
接口,其实是在
UR
提供的接口上封装的一层,感兴趣的请参考
ROS
官
网上的项目。
UR
机器人提供的通讯接口如图
1
所示,接口的比较见表格
1
。
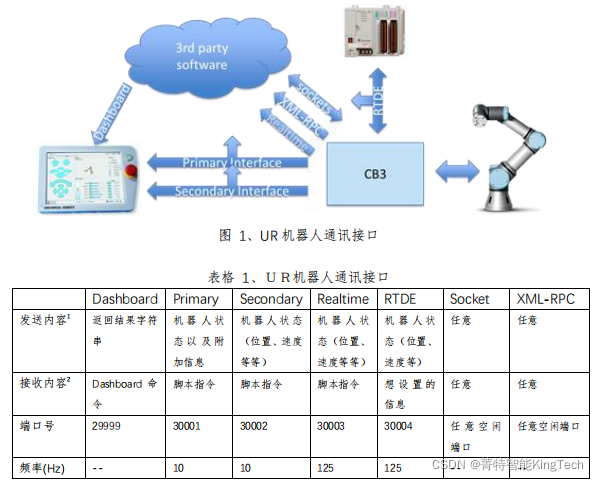
UR
机器人目前支持
Modbus-TCP, EthernetIP
以及
Profinet
三种总线,其中
UR
机器人
自带
Modbus-TCP
服务器,
PC
或者外部智能设备可通过该端口获取机器人的状态信息。
2.
通
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2054
2054

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











