






追加基准轴和工装轴时,必须在正确设定硬件后,启动维护模式,维护模式方法参考文章《安川机器人系统模式更改》。

基准轴的设定

1. 进入维护模式后,将安全模式更改为管理模式
2. 选择主菜单中的【系统】
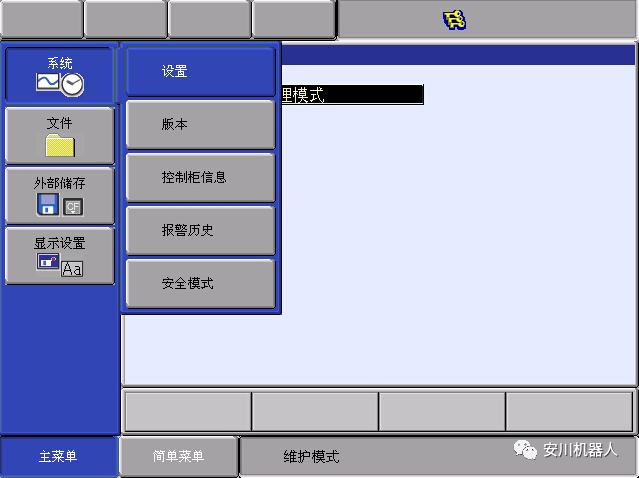
– 显示系统信息画面。
3. 选择【设置】
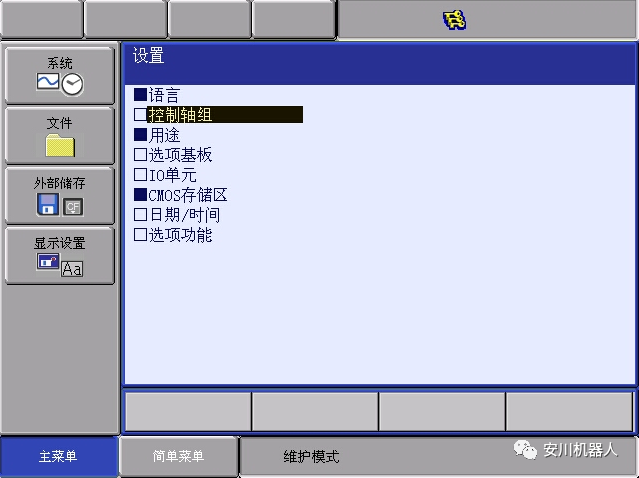
– 显示设定画面。
– 带有■符号的的项目不可选。
4. 选择【控制轴组】
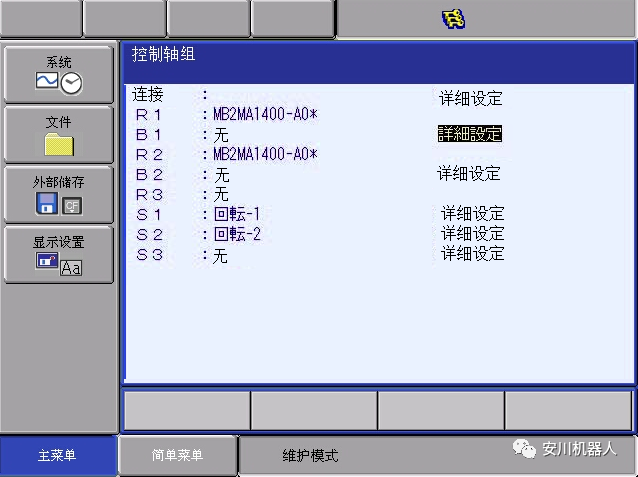
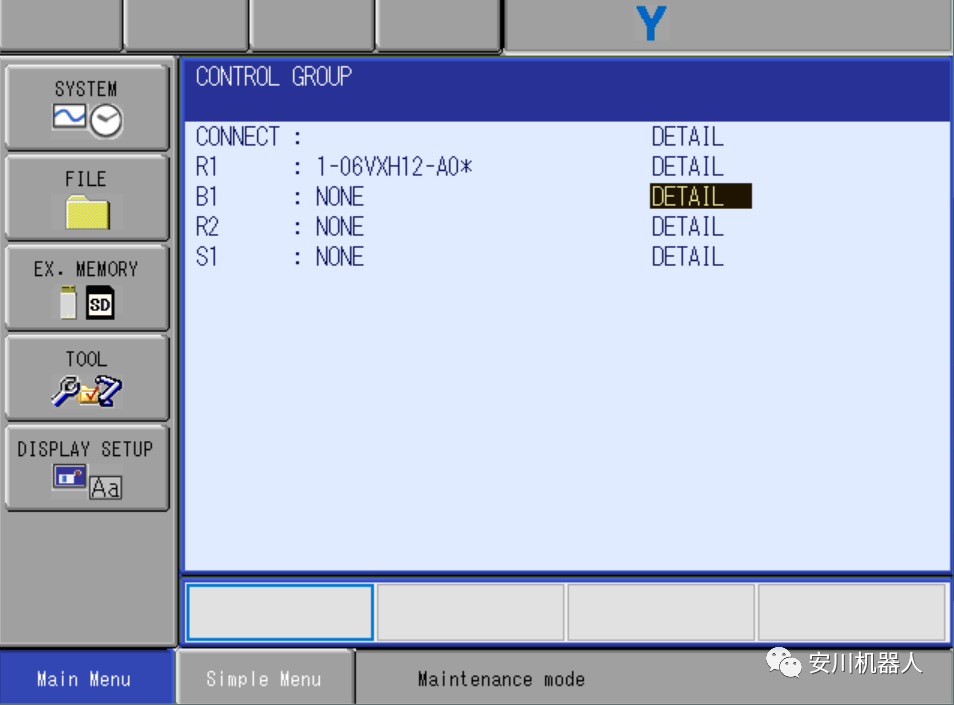
– 显示目前已设定的控制轴组的机型。
5. 移动光标到目标控制轴组,按下[选择]

– 显示程序一览画面
走行-X :走行X轴型基座
走行-Y :走行Y轴型基座
走行-Z :走行Z轴型基座
走行-XZ :走行XZ轴型基座
走行-XY :走行XY轴型基座
走行-YZ :走行YZ轴型基座
走行-XYZ :走行XYZ轴型基座
– 选择机型后转到连接画面。

连接设定

在连接画面中,指定将基准轴的各轴与伺服基板的某个插头点相连接、与接通单元的某一制动器相连接、与某一整流器相连接,以及指定超程信号。
1. 在连接画面中确认每个控制轴组的连接(此时只设置B1行即可)
– STO连接时的连接画面
2. 选择更改的控制轴组的连接项目
– 显示可以设定的项目。
– 选择项目后可以进行设定更改。另外,按“取消”返回连接画面。
– STO连接时的连接画面
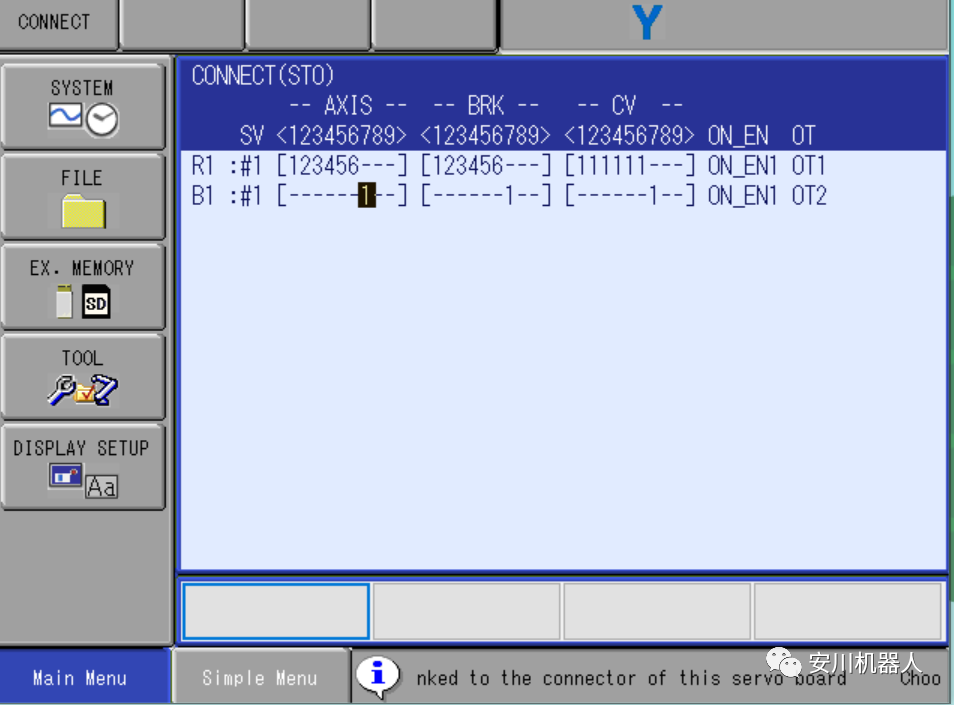
–设定将每个控制轴组的每个轴连接到伺服基板的某个插头(CN)上。
[ ]内的数值是轴编号,表示将某个轴连接到某个插头上。
–设定将每个控制轴组的每个轴连接到伺服基板的某个制动器(BRK)上。
[ ]内的数值是轴编号,表示将某个轴连接到某个制动器上。
–设定将每个控制轴组的每个轴连接到某个整流器(CV)上。
[ ]内的数值是整流器编号,表示将某个轴连接到某个整流器..
–设定将各控制轴组连接到某个启用信号(ON_EN)上。
–设定将各控制轴组连接到某个超程信号(OT)上。
未安装防超程限位开关的控制轴组,或不需要配置外部轴起超程信号时,选择“不连接”。
3.在连接画面中按下[回车]
–结束连接画面的设定,转到轴构成画面。

轴配置的设定

在轴配置画面中设定每个轴的的轴类型。
1. 在轴配置画面中确认每个轴的轴类型。
–显示各轴的轴类型。
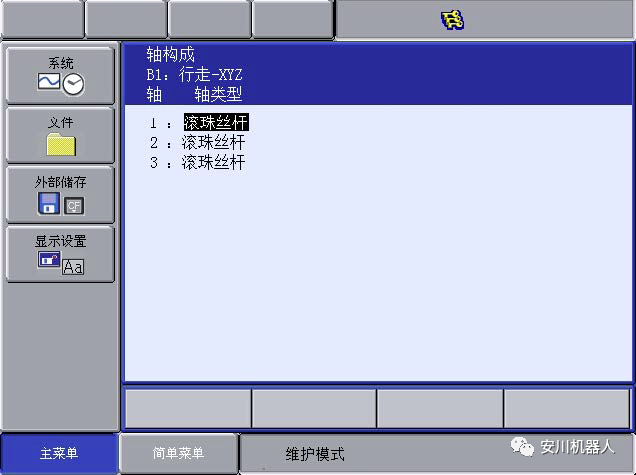
2. 选择更改的轴类型
(1) 显示可以设定的轴类型。

(2) 滚珠丝杠结构的走行轴下,选择“滚珠丝杠”;在齿条、齿轮的走行轴下,选择“齿条、齿轮”。
(3) 返回到轴配置画面。
3. 选择轴类型
4. 在轴配置画面中按下[回车]
–结束轴配置画面的设定,转到机构规格画面。
机构规格的设定

在机构规格画面中设定每个轴的机构规格。
1. 在机构画面中确认轴的规格
–显示轴的机构规格。
-
机构规格画面(滚珠丝杠时)
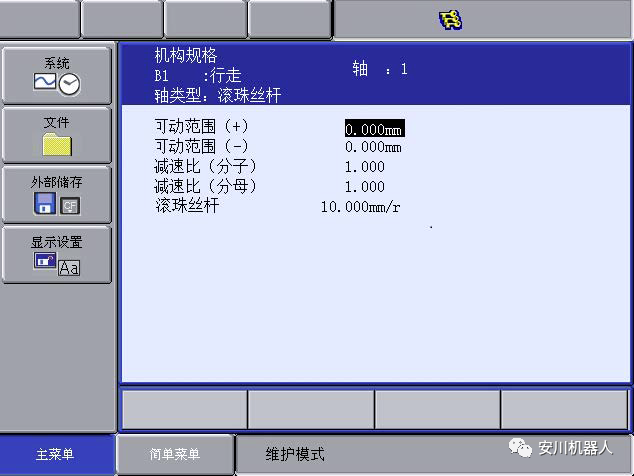
–可动范围:设定原点位置为“0”时的动作限制位置(+ 方向、- 方向,单位:mm)。
–减速比:分别设定分子和分母。
< 例 >1/2 时,分子设定为 1.0,分母设定为2.0。
–滚珠丝杠:设定滚珠丝杠旋转1次时的移动距离(单位:mm/r)
-
机构规格画面(齿条和齿轮时)
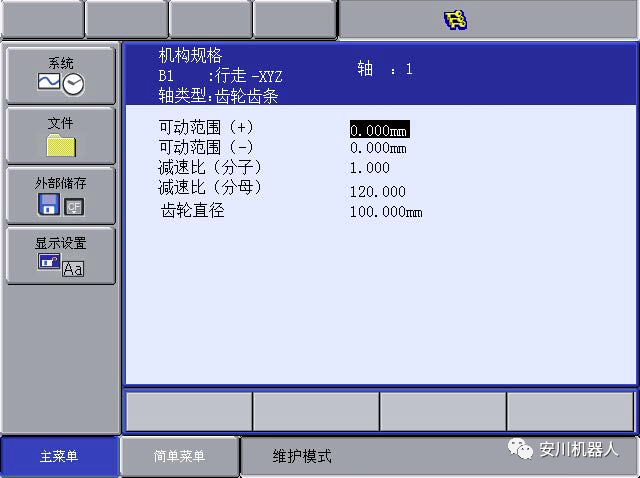
–可可动范围:设定原点位置为“0”时的动作限制位置(+ 方向、- 方向,单位:mm)。
–减速比 :分别设定分子和分母。
< 例 >1/2 时,分子设定为 1.0,分母设定为2.0。
–齿轮直径 :设定齿轮的直径。(单位:mm)
2. 选择更改项目
–将光标移动到要更改设定值的项目上,按下[选择]
3. 更改设定内容
–进入数值输入状态,输入设定值,按下[回车]
4. 在机构规格画面中按下[回车]
–转到下一轴的机构规格画面上,请同样设定机构规格。
–在最终的机构规格画面上按下[回车]时,结束机构规格画面的设定,转到马达规格画面。

马达规格的设定
在马达规格画面中进行有关马达的各种设定。
1. 在马达规格画面中确认轴的规格
– 显示轴的马达规格。
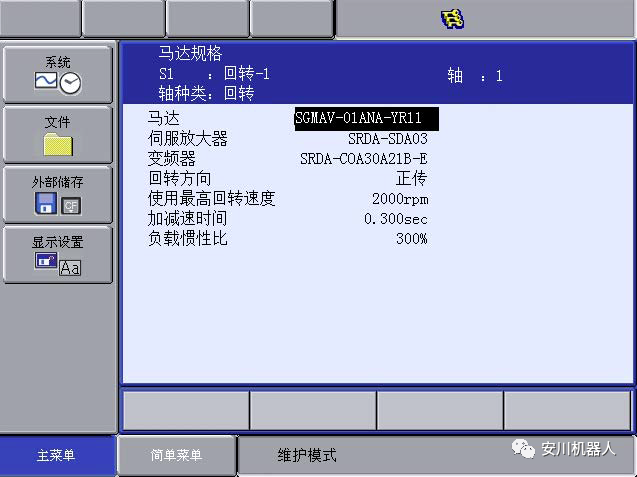
2. 选择更改项目
– 选中数值时,进入数值输入状态。
– 选择马达、伺服放大器、整流器时,会分别显示马达、伺服放大器、整流器的一览表画面,根据实际应用型号选择对应的选项。
– 旋转方向:设定当前值向正方向增加的方向为马达旋转方向。
– 最高旋转速度:设定马达的最高旋转速度。(单位:rpm)
– 加减速时间 :在以100%速度进行动作时,在0.1到1.00的范围内设定从停止状态到最大速度所花费的时间。(单位:sec)
– 负载惯性比:将走行轴的初始值设为300,旋转轴的初始值设为0。
3. 更改设定内容
4. 在马达规格画面中按下[回车]
– 转动下一轴的马达规格画面上,请同样进行马达规格的设定。
– 在最终轴的马达规格画面上按下[回车]时,结束马达规格画面的设定,转到初始化的确认对话框上。
– 在确认对话框中选择“是”,根据之前的选择,自动设定系统参数。
5. 相关文件的的初始化
– 完成基准轴的追加/更改操作。
6.正常开机确认
外部轴快捷键的操作方法
操作外部轴时除了使用示教器面板切换到操作对象为外部轴后使用±X健外,也可以通过分配快捷键来进行移动外部轴,操作方法详见文章:
轴操作键分配功能,可将示教编程器[轴操作键]的第7轴 (E+, E-)、第8轴(8+,8-) 设为任意外部轴,不必切换控制组,便可对外部轴进行轴操作。但是请注意只有当前的操作对象是机器人时,可使用通过该功能分配完成的第7轴、第8轴对外部轴进行操作。当操作对象是外部轴时,照常使用第1轴(S+, S-)以后的键进行操作。
已分配的外部轴的操作方法
1. 按下[机器人切换]
– 在示教编程器状态栏的左端会显示机器人,提示操作对象为机器人。
另外,[机器人切换]的 LED灯会亮起。
2. 按下第7轴(E+, E-)或是第8轴(8+, 8-)的[轴操作键]
– 即使不存在机器人的第7轴、第8轴,该功能的分配正确时,已分配的外部轴将动作。
注意:
若第7轴和第8轴设为同一轴(控制组、轴编号相同)。则无论按下哪一轴的[轴操作键],外部轴都无法动作。此时,会显示“第7根轴和第8根轴分配成了同一根轴”的警告信息。解除不使用按键的分配或是分配为不同轴进行解除。

















 7244
7244

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









