







 本文详细分析了霍尔传感器在不同转速和绕组配置下与反电动势的关系,讨论了绕线方式对电机反电动势的影响,以及直觉错误的理解。通过实例和理论解释,澄清了正反转对信号对应关系的影响,并探讨了算法中坐标系选择的重要性。
本文详细分析了霍尔传感器在不同转速和绕组配置下与反电动势的关系,讨论了绕线方式对电机反电动势的影响,以及直觉错误的理解。通过实例和理论解释,澄清了正反转对信号对应关系的影响,并探讨了算法中坐标系选择的重要性。
文章目录
前言
一直没理清楚霍尔传感器输出信号和反电动势之间的关系,尝试写一篇分析的文章,期待得到各路隐身专家的指点。
1. 研究对象
6极9槽外转子无刷电机;10极12槽外转子无刷电机。
有关电机的知识:
链接: 【电机控制】无刷电机入门资料
有关反电动势的知识:
链接: 赵云-反电动势到底该如何理解?
2. 反电动势和霍尔信号分析
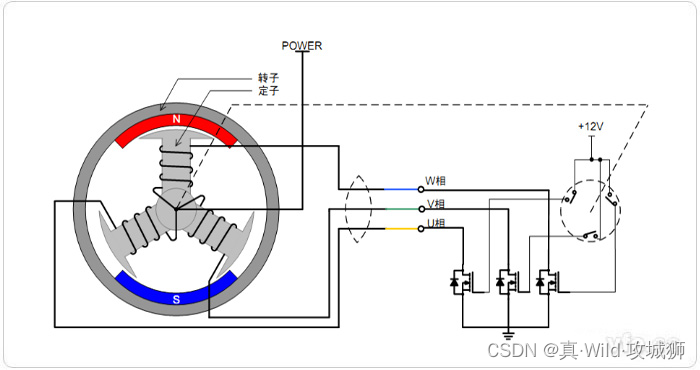
2.1 状态定义
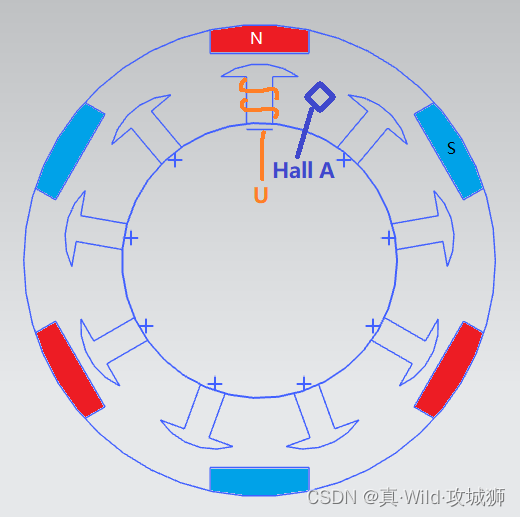
如图,研究对象为6极9槽的外转子电机。设当前N极正对U相线圈状态为0电角度。霍尔传感器装配于U相线圈及其紧邻的顺时针第一个槽中。
根据以上假设有如下推论:
(1)转子从第1个槽转到第2个槽,物理角度旋转360/9=40°,电角度旋转6×180÷9=120°;
(2)转子转到图示永磁体N极正对Hall A电角度为60°,槽间距电角度的一半;
(3)0°电角状态的磁通最大,设为φ,设旋转角速度为ω,则任意时刻磁通可以近似为φcos(ωt);
(4)根据(3),0°电角状态的反电动势正比于d(φcos(ωt))/dt=-φωsin(ωt),即永磁体正对绕组时为该相反电动势过零点,反电动势符合增反减正;
(5)从N极正对U相转到S极正对U相,电角度旋转180°;
(6)假设Hall A满足N极接近关断(上拉输出高电平),S极接近导通(上拉输出低电平),不考虑霍尔开闭磁通阈值的情况下,Hall A输出高电平的电角度区域为[(60-90)°,(60+90)°],即[-30°,150°];
(7)定义转子顺时针转动为正转,以下研究针对正转。
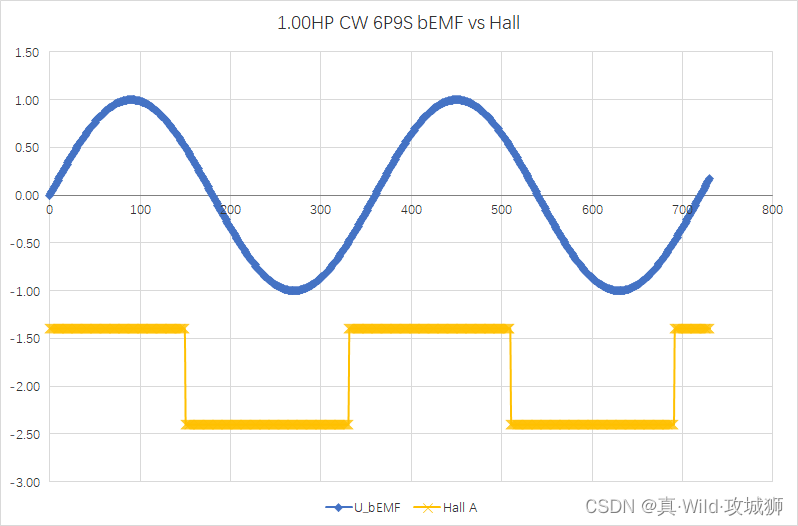
基于以上推论,可以画出U相反电动势和Hall A的对应关系如下图, 霍尔上升沿超前反电动势过零点30°。如果考虑开闭磁通阈值,超前角度实际应略小于30°电角度。
为了便于理解,下面的所有图示横轴为时间,可以直接对应示波器的波形。
2.2 逆时针转动
此时旋转角速度更新为(-ω),bEMF正比于d(φcos(-ωt))/dt=-φ(-ω)sin(-ωt)=-φωsin(ωt)。
霍尔状态只跟转子当前电角度有关。
此时霍尔上升沿滞后反电动势过零点210°。
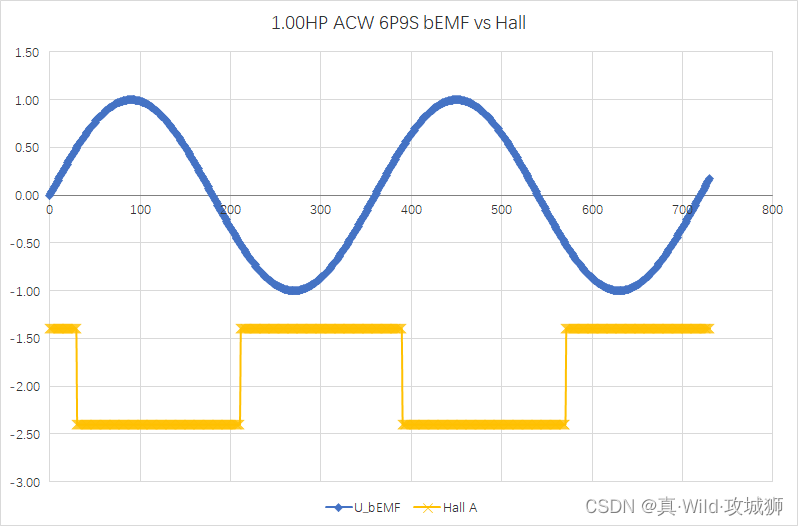
从上面的图中可以看出,正转和反转会导致霍尔与反电动势的对应关系对调。
2.3 三相反电动势和三相霍尔输出
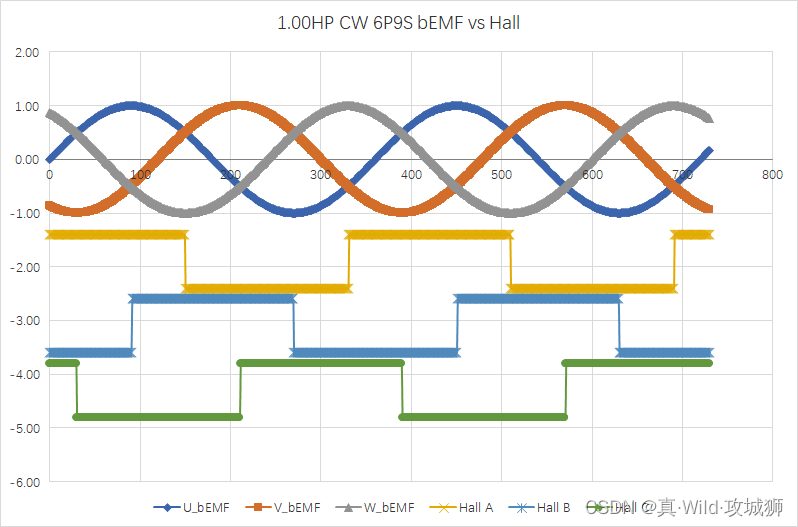
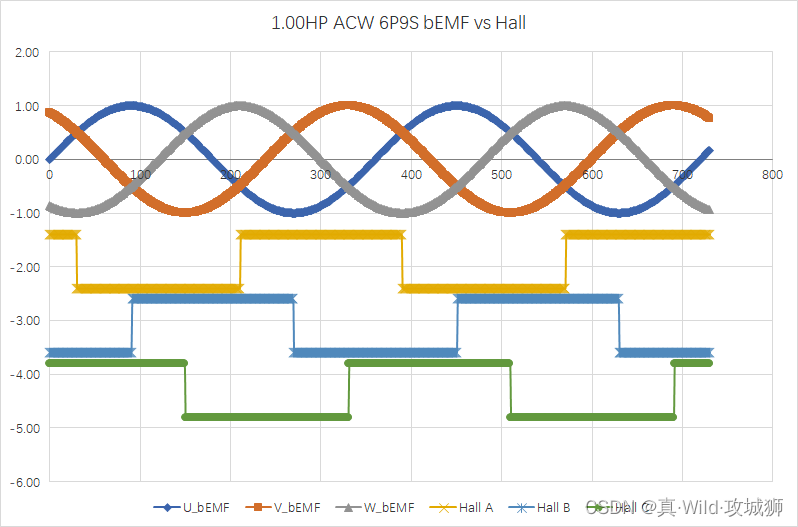
上图是相反电动势和霍尔的关系。类似的,我们可以测UV,VW,WU的反电动势与霍尔的关系来确定线序和对应关系,大致可以用UV正半周对应HU高电平,负半周对应HU低电平;VW正半周对应HV高电平,负半周对应HV低电平;WU正半周对应HW高电平,负半周对应HW低电平。需要注意的是,由于正反转会导致对应关系倒置,原因也很简单,超前关系变了,U超前V变成了V超前U。霍尔的超前关系也倒置了。
2.4 10极12槽外转子电机分析
先上图上结论:
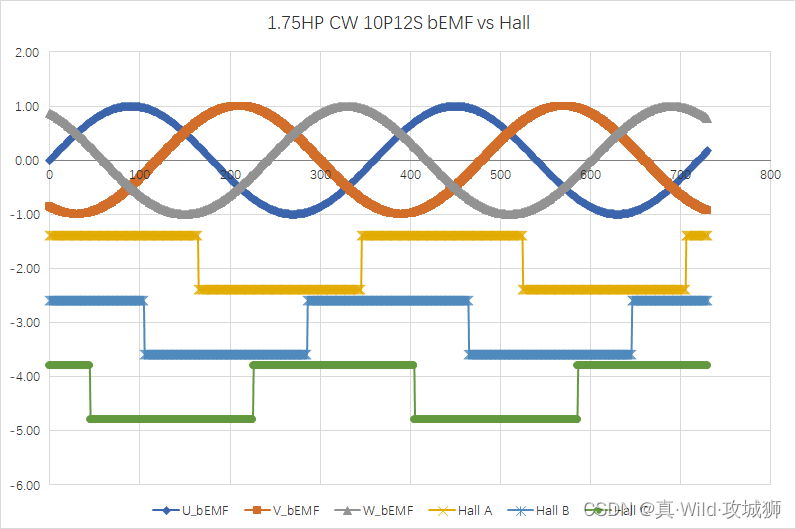

简单做个说明,因为槽间电角度为150°,因此霍尔板的设置为间隔1个槽放置,即霍尔之间的电角度相差300°(或-60°)。则Hall_B的信号会超前Hall_A。这就是60°霍尔的安装方式。
3. 绕线方式对电机反电动势的影响
按照由易到难的顺序,我们先来研究2极3槽的情况。这里涉及到一些基本的认识,极数是偶数,即磁极总是成对出现的;三相电机槽数是3的倍数,即UVW总是成组出现。
从上图可以发现,定子绕组的绕线方向是相同的。设想一下,如果我们把绕线方向变换一下,根据楞次定律,在转子转动方向不变的情况下,反电动势会反向。
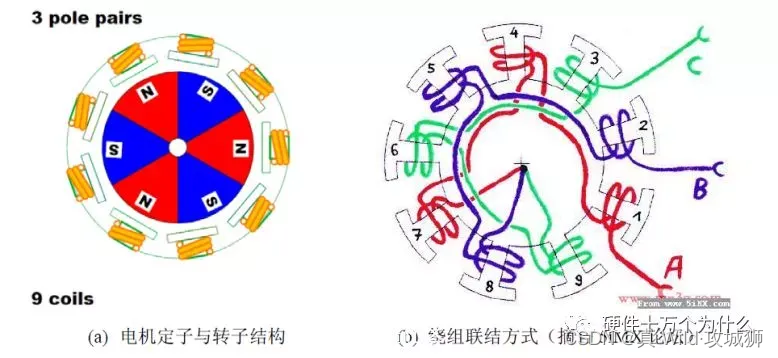
接下来以6极9槽的电机为研究对象。磁极的分布相对简单,总是N、S、N、S……按照圆周均匀分布。那9槽应该如何分布呢?先上一张网上找来的图参考一下。
链接: 无刷电机的工作原理,动图演示,一目了然
再上一张2极6槽的。
还有一些其他情况供参考,笔者目前还不清楚下面链接电机的具体用途:
链接: A2212无刷电机 绕线方法
(1)参考上面的两张图可以发现第一种分布方式,即按照U、V、W、U、V、W……均匀分布。如果把均布的U单拿出来看,其连线方式是串联的线圈,绕中心旋转后可以完全重叠。
(2)参照本节第一张附图,更简单粗暴一点,得到第二种分布方式,将一个槽拆分成连续的串联多槽。举例,6槽分布为U、U、V、V、W、W。不过笔者并没有在网上找到对应的示意图,想必一定不是最优的工程方案。具体原因有待后续考究。
粗略对比一下:
(1)如果按照第一种分布方式,霍尔传感器不管是采用60°安装还是120°安装,其相位补偿角与安装的槽无关;如果按照第二种方式,HU装在U相绕组的不同槽,其相位补偿角是不一样的。
(2)如果按照第一种方式,霍尔板的设计可以更小。以6极9槽为例,只需在连续的3个槽中布置霍尔传感器即可,物理角度决定霍尔板尺寸大小。按第二种方式呢?显然我们只能按照圆周均布来放置霍尔传感器,想象一下3槽定子的霍尔安装。
4. 表格化小工具
笔者基于Excel将各项参数的计算公式化,输出信号图形化。已绑定本篇文章资源。
5. 直觉错误
笔者在学习过程中有一个直觉错误,霍尔传感器的对应关系总是与相线绕组一一对应的,其霍尔状态顺序总是符合物理位置的排序。
事实上并非如此,举个很简单的例子来说明,霍尔传感器按照相同的方式安装连接和输出,但极对数1对和2对在旋转过程中输出的霍尔状态是反向的(感兴趣的同学可以自己推导以下)。产生错误的原因是在分析计算中混同了机械角度和电角度的理解。
6. 结语
以上内容仅仅考虑了说明方便,并没有考虑与算法中坐标系保持一致。从FOC算法来看,按照逆时针方向定义U、V、W更加符合我们的坐标习惯。具体推导这里不再赘述。
欢迎各路大神拍砖交流!



















 1205
1205

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











