







永磁同步电机FOC矢量控制SIMULINK仿真系列记录(1):算法部分(CLARK)
永磁同步电机FOC矢量控制SIMULINK仿真系列记录(2):算法部分(PARK)
永磁同步电机FOC矢量控制SIMULINK仿真系列记录(3):算法部分(ANTI_PARK)
续:由原理可知,三相电机ABC相会产生一个旋转磁场V(矢量),这个矢量的大小不变,旋转的角速度不变。通过Clark变换将这个矢量投影到alpha和beta上,由三相静止到两相静止(3s/2s);再经Park变换,将静止的αβ坐标系变成旋转的αβ坐标系,此时为dq坐标系,从两相静止到两相旋转(2s/2r);控制三相电机即控制三相电压,经PARK变换之后,解耦出的两个直流分量id和iq即是我们需要控制的量,经过PID控制器运算出来的即是Vd和Vq,Vd和Vq也是直流量,这时就需要进行PARK变换的反推导,得到两相静止的电压量Valpha和Vbeta;最后就是本次坐标变换最后的要做的工作(CLARK逆变换),将两相静止的电压量Valpha和Vbeta转换成三相电压。
整个电机的控制过程(FOC控制)的坐标变换过程如上面所述,坐标变换的目的即将需要无法准确控制的三相电流通过解耦及PID控制得到可控的三相电压。
完整模型
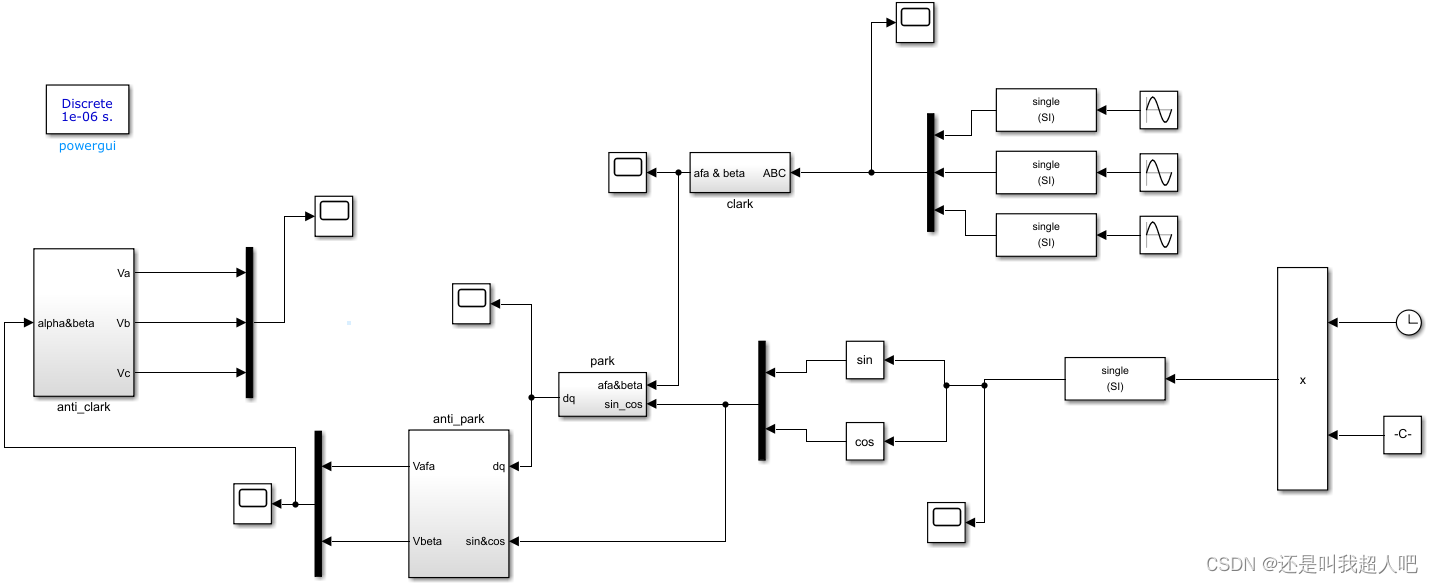
如图中所示,将PARK逆变换生成的Valpha和Vbeta输入到anti_clark模块,经过PARK逆运算后将生成Va、Vb及Vc。
运行模型,查看Scope5显示的Va、Vb及Vc波形.

至此,三相永磁同步电机的同步坐标变换全部介绍完成,若想结合实际的硬件观测及验证理论的正确性,可将提供的模型的核心算法分离出来,配合实际的硬件加以验证。
最后,不得不说前人的智慧,将不可控且复杂的变量变成直观易控的变量真的是为后来任学习提供了方便,知识的海洋无穷无尽,生命不息,学习不止。
后面会继续更新FOC的学习记录,仅以此系列向各位前辈致敬。















 843
843











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









