







永磁同步电机FOC矢量控制SIMULINK仿真系列记录(1):算法部分(CLARK)
永磁同步电机FOC矢量控制SIMULINK仿真系列记录(2):算法部分(PARK)
永磁同步电机FOC矢量控制SIMULINK仿真系列记录(4):算法部分(ANTI_CLARK)
续:在前两个变换的基础上搭建Anti Park模型。Park反变换在控制交流电机中具有重要性,主要体现在以下几个方面:
1. 控制算法:在矢量控制和场向量控制等高级控制算法中,需要将控制信号转换到dq坐标系下进行处理。Park反变换是将反馈信号从dq坐标系转换回三相坐标系的关键步骤,使得控制算法可以在三相坐标系下实现。
2. 电机控制:交流电机的控制需要在dq坐标系下对电压或电流进行控制,以实现对电机转速和转矩的精确控制。Park反变换是将控制信号从dq坐标系转换回三相坐标系的必要步骤。
3. 系统稳定性:正确的Park反变换可以确保控制系统在三相坐标系下能够正确地控制交流电机,提高系统的稳定性和性能。
4. 工程应用:在实际的电机控制系统中,Park反变换是一个常见且必要的步骤,用于将控制算法得出的dq坐标系下的控制信号转换为适合实际控制的三相坐标系信号。
因此,Park反变换在交流电机控制系统中具有重要性,是实现高性能电机控制的关键步骤之一。
话不多说。
完整模型
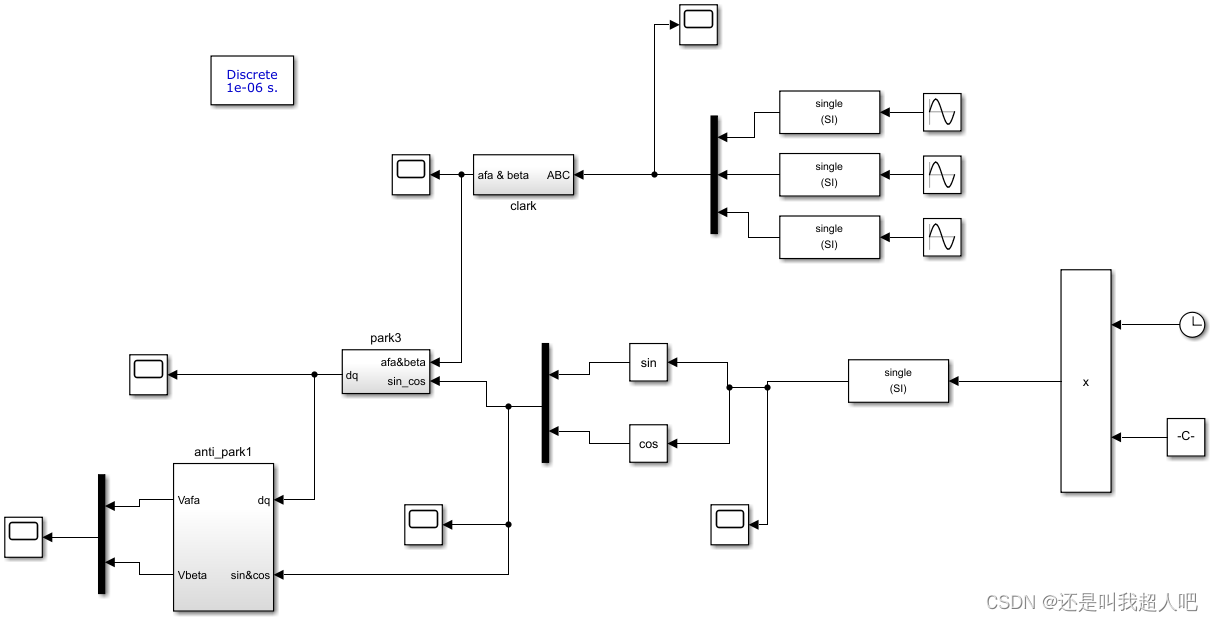
Anti_Park部分:

如下图中所示,将PARK变换生成的Id和Iq输入到anti_park1模块,同样输入到模块中的还有模拟的电角度,二者经过PARK逆运算后将生成Valpha及Vbeta。
运行模型,查看Scope6显示的Valpha及Vbeta波形。
















 6万+
6万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









