






 文章详细介绍了如何在Ubuntu系统中安装EVO并修改VINS-Mono源代码,以适应Euroc数据集的MH_01_easy场景。主要修改涉及数据输出格式,使其符合TUM格式要求,以便于进行位姿估计的精度分析。修改后的代码会生成符合EVO分析工具要求的文件,通过EVO可以进行绝对和相对位姿误差的可视化评估。
文章详细介绍了如何在Ubuntu系统中安装EVO并修改VINS-Mono源代码,以适应Euroc数据集的MH_01_easy场景。主要修改涉及数据输出格式,使其符合TUM格式要求,以便于进行位姿估计的精度分析。修改后的代码会生成符合EVO分析工具要求的文件,通过EVO可以进行绝对和相对位姿误差的可视化评估。
一 evo安装
可以参考官方文档https://gitcode.net/mirrors/michaelgrupp/evo?utm_source=csdn_github_accelerator,或者:
Sudo apt install python-pip
Pip install evo --upgrade --no-binary evo --user
需要注意,本文使用的是Euroc数据集(https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets)的MH_01_easy,
二 vins-mono代码修改
我的vins-mono代码在/home/yang/vins-mono-catkin_ws/src路径下,平时我们运行vins-mono时用的是MH_01_easy.bag,而在evo中我们需要用到ASL Dataset Format,请事先下载,并放在/home/yang/vins-mono-catkin_ws路径下
vins-mono自动保存的数据格式不符合tum格式,所以我们需要对vins-mono的源代码做一些修改:
(1)…/VINS-Mono/vins_estimator/src/utility/visualization.cpp中的pubOdometry()函数:
ofstream foutC(VINS_RESULT_PATH, ios::app);
foutC.setf(ios::fixed, ios::floatfield);
foutC.precision(0);
foutC << header.stamp.toSec() * 1e9 << ",";
foutC.precision(5);
foutC << estimator.Ps[WINDOW_SIZE].x() << ","
<< estimator.Ps[WINDOW_SIZE].y() << ","
<< estimator.Ps[WINDOW_SIZE].z() << ","
<< tmp_Q.w() << ","
<< tmp_Q.x() << ","
<< tmp_Q.y() << ","
<< tmp_Q.z() << ","
<< estimator.Vs[WINDOW_SIZE].x() << ","
<< estimator.Vs[WINDOW_SIZE].y() << ","
<< estimator.Vs[WINDOW_SIZE].z() << "," << endl;
foutC.close();
改成:
ofstream foutC(VINS_RESULT_PATH, ios::app);
foutC.setf(ios::fixed, ios::floatfield);
foutC.precision(0);
foutC << header.stamp.toSec() << " ";
foutC.precision(5);
foutC << estimator.Ps[WINDOW_SIZE].x() << " "
<< estimator.Ps[WINDOW_SIZE].y() << " "
<< estimator.Ps[WINDOW_SIZE].z() << " "
<< tmp_Q.x() << " "
<< tmp_Q.y() << " "
<< tmp_Q.z() << " "
<< tmp_Q.w() << endl;
foutC.close();
(2)…/VINS-Mono/pose_graph/src/pose_graph.cpp中的addKeyFrame()函数:
ofstream loop_path_file(VINS_RESULT_PATH, ios::app);
loop_path_file.setf(ios::fixed, ios::floatfield);
loop_path_file.precision(0);
loop_path_file << cur_kf->time_stamp * 1e9 << ",";
loop_path_file.precision(5);
loop_path_file << P.x() << ","
<< P.y() << ","
<< P.z() << ","
<< Q.w() << ","
<< Q.x() << ","
<< Q.y() << ","
<< Q.z() << ","
<< endl;*/
改成:
ofstream loop_path_file(VINS_RESULT_PATH, ios::app);
loop_path_file.setf(ios::fixed, ios::floatfield);
loop_path_file.precision(0);
loop_path_file << cur_kf->time_stamp << " ";
loop_path_file.precision(5);
loop_path_file << P.x() << " "
<< P.y() << " "
<< P.z() << " "
<< Q.x() << " "
<< Q.y() << " "
<< Q.z() << " "
<< Q.w() << endl;
(3)…/VINS-Mono/pose_graph/src/pose_graph.cpp中的updatePath()函数:
ofstream loop_path_file(VINS_RESULT_PATH, ios::app);
loop_path_file.setf(ios::fixed, ios::floatfield);
loop_path_file.precision(0);
loop_path_file << (*it)->time_stamp * 1e9 << ",";
loop_path_file.precision(5);
loop_path_file << P.x() << ","
<< P.y() << ","
<< P.z() << ","
<< Q.w() << ","
<< Q.x() << ","
<< Q.y() << ","
<< Q.z() << ","
<< endl;
改成:
ofstream loop_path_file(VINS_RESULT_PATH, ios::app);
loop_path_file.setf(ios::fixed, ios::floatfield);
loop_path_file.precision(0);
loop_path_file << (*it)->time_stamp << " ";
loop_path_file.precision(5);
loop_path_file << P.x() << " "
<< P.y() << " "
<< P.z() << " "
<< Q.x() << " "
<< Q.y() << " "
<< Q.z() << " "
<< Q.w() << endl;
(4)…/VINS-Mono/pose_graph/src/pose_graph_node.cpp中的main()函数:
Line 506源码:
VINS_RESULT_PATH = VINS_RESULT_PATH + "/vins_result_loop.csv";
改成:
VINS_RESULT_PATH = VINS_RESULT_PATH + "/vins_result_loop.tum";
或者改成:
VINS_RESULT_PATH = VINS_RESULT_PATH + "/vins_result_loop.tum";
(5)运行之前要修改一下VINS-Mono/config/euroc/euroc_config.yaml的output路径:
Line 4改成::
output_path: "/home/yang/GVinsmono_ws/output/"
Line 69改成::
pose_graph_save_path: "/home/yang/GVinsmono_ws/output/pose_graph/" # save and load path
三 测试
(1)进入工作区,重新catkin_make一遍后,运行vins-mono,即:
cd ~/vins-mono-catkin_ws/src
cd ..
catkin_make
source ~/vins-mono-catkin_ws/devel/setup.bash
(2)在vins-mono-catkin_ws文件夹下打开三个终端
不要忘记设置环境变量:source devel/setup.bash
第一个终端
source devel/setup.bash
roslaunch vins_estimator vins_rviz.launch
第二个终端
source devel/setup.bash
roslaunch vins_estimator euroc.launch
第三个终端
source devel/setup.bash
rosbag play MH_01_easy.bag
(3)当跑完一遍后,在我们设定的输出位置会出现一个vins-result_loop.tum文件。
在文章一开始,我提到过需要使用的是MH_01_easy的ASL Dataset Format格式,所以当我们下载完成后,解压,进入到该文件下的state_groundtruth_estimate0文件夹中,我们会发现里面有一个data.csv文件,我们需要把他转换成tum格式的文件:(terminal中先要进入到state_groundtruth_estimate0/目录下)
evo_traj euroc data.csv --save_as_tum
把data.tum复制到/home/yang/GVinsmono_ws/output/文件夹中
就在当前目录下输入:
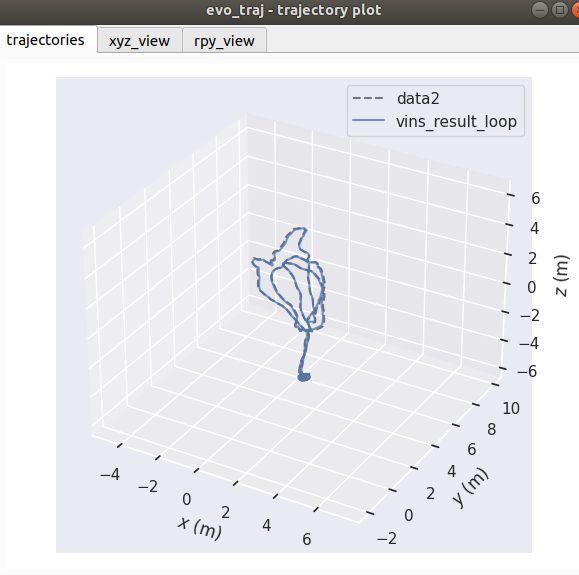
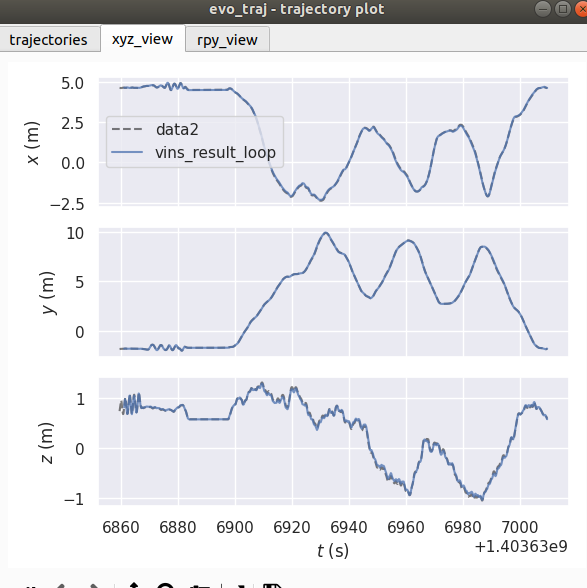
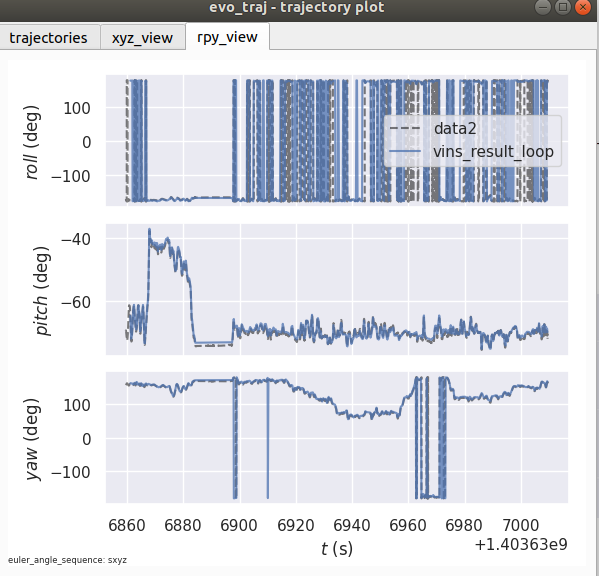
同时显示回环轨迹和真值轨迹
evo_traj tum vins_result_loop.tum --ref=data.tum -p --plot_mode=xyz --align --correct_scale
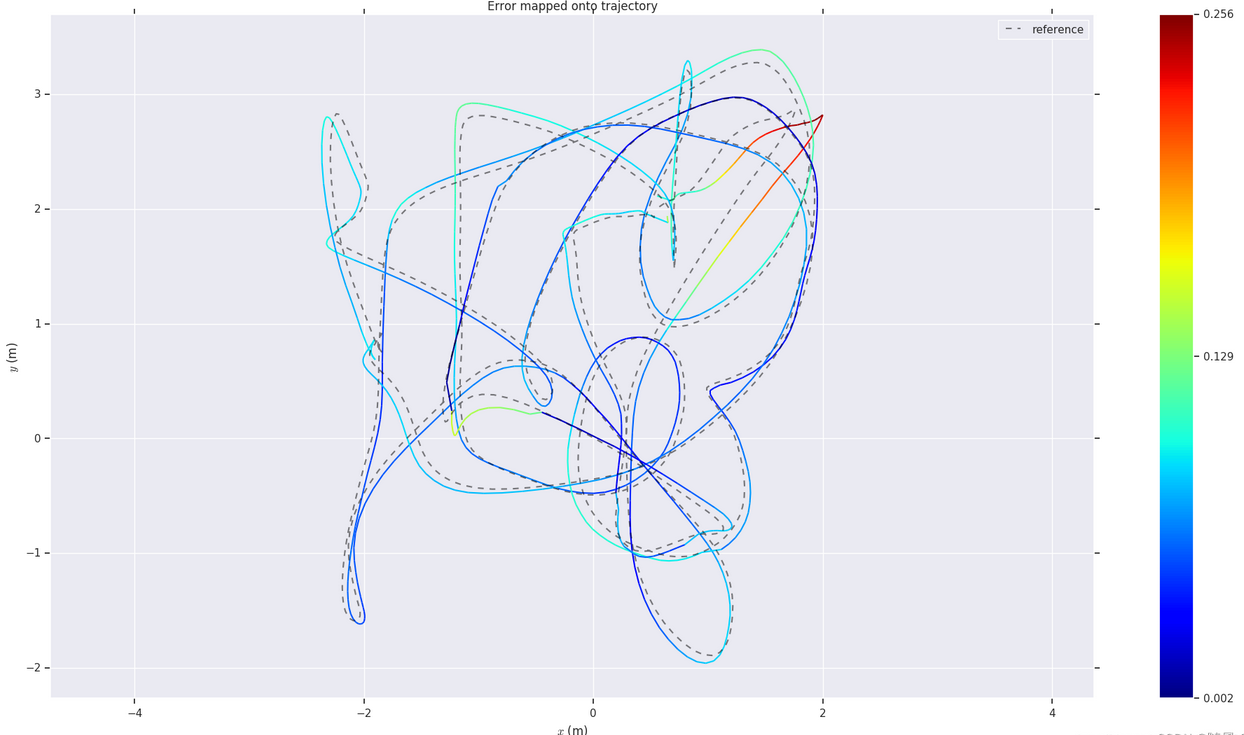
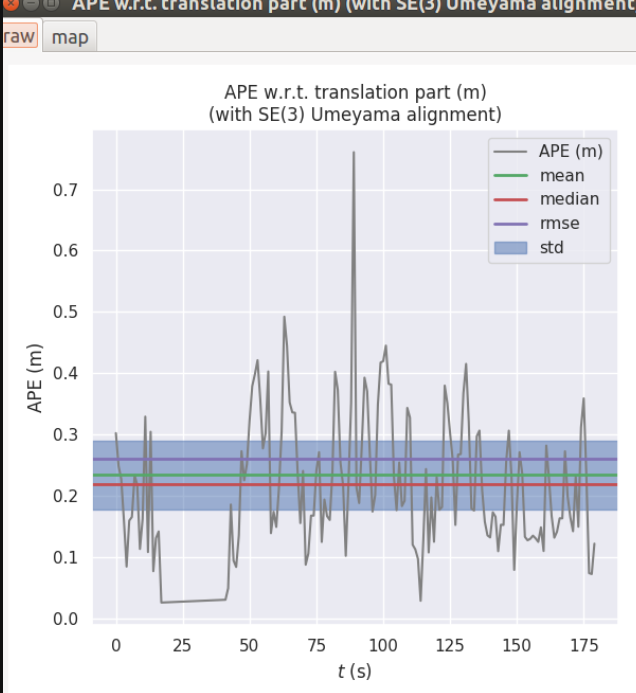
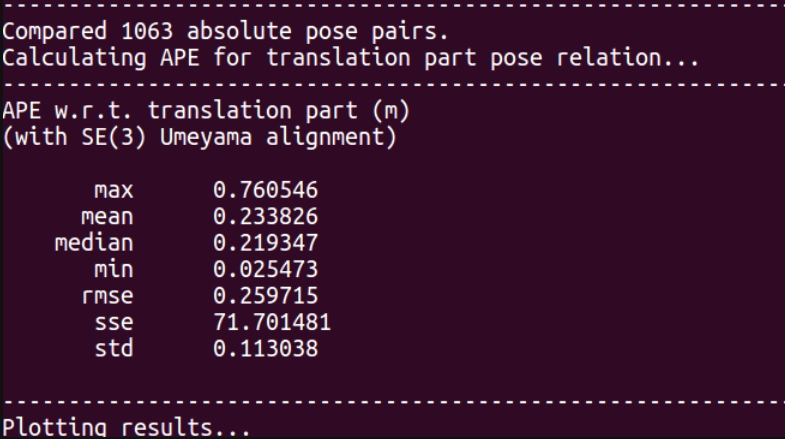
绝对位姿误差evo_ape
evo_ape tum data.tum vins_result_loop.tum -va --plot --plot_mode xyz
相对位姿误差evo_rpe
evo_rpe tum data.tum vins_result_loop.tum -va --plot --plot_mode xyz
结果与evo_ape类似

















 7455
7455

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









