






最近在上计算机视觉的课程,梳理一下知识点并记录一下吧。
1.坐标系统
1.1.视觉几何的常用坐标系
视觉测量坐标系有图像坐标系(又分为像素坐标系和像面坐标系)、摄像机坐标系、物体坐标系和世界坐标系。
1.1.1图像坐标系
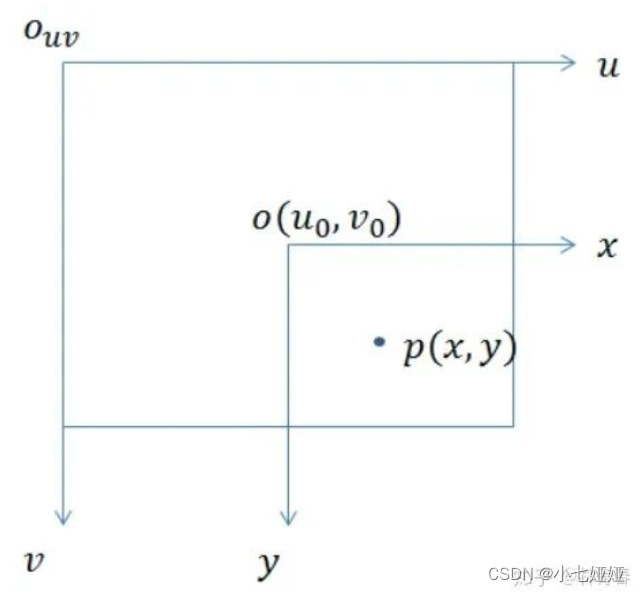
| 像素坐标系 | 像面坐标系 | |
|---|---|---|
| 简写 | Of-uv | O-xy |
| 原点 | 像面左上角(u0,v0) | 光轴与像面交点(x0,y0) |
| 单位 | 像素(pixel) | 毫米(mm) |
| 表示 | (u,v) | (x,y) |
| 坐标含义 | 点在图像上的行数和列数 | 点在像面上的具体位置 |
| 转换关系 | u=x/dx+u0,v=y/dy+u0 | |
1.1.2.摄像机坐标系
摄像机坐标系 Oc-XcYcZc 是摄像机在自己角度上的坐标系,原点在摄像机的光心上,Z轴与摄像机光轴重合垂直于像面,OOc为有效焦距
1.1.3.世界坐标系
世界坐标系Ow-XwYwZw独立于摄像机坐标系之外,自行定义
1.1.4.物体坐标系
与被研究的物体有关,通常与世界坐标系统一成一个坐标系
1.2常用坐标系之间的关系
1.3共线方程
2.三维空间变换
2.1旋转表达
2.1.1旋转矩阵
坐标系(e1,e2,e3)发生了一次旋转,变成了(e1',e2',e3'),向量a的位置不变,其坐标从(a1,a2,a3)变成(a1',a2',a3'),满足以下条件:
→
R称为旋转矩阵,满足以下两个性质:1.是一个正交矩阵;2.行列式为1。
2.1.2旋转向量
在矩阵表示法下,一个旋转矩阵用了九个量描述了三个自由度的旋转运动,存在冗余。因此可以尝试用一个向量的方向代表转轴方向,用向量的模长代表旋转角度,即用一个三维向量(旋转向量)来表示旋转运动。
罗德里格斯公式表示旋转矩阵和旋转向量的互相转化
2.1.3欧拉角
欧拉角是为了让旋转更加直观而提出的,把每一次旋转分解成了三次绕不同轴的旋转。常见的有:yaw-pitch-roll(绕物体的Z轴旋转,得到偏航角yaw;绕旋转之后的Y轴旋转,得到俯仰角pitch;绕旋转之后的X轴旋转,得到偏航角roll)。存在奇异性问题
2.1.4四元数
由于欧拉角和旋转向量都是紧凑的,具有奇异性,因此在表达三维空间旋转时,用四元数来表示。四元数是紧凑的也没有奇异性。它能够很方便的刻画刚体绕任意轴的旋转。
可表示为:q=q0+q1*i+q2*j+q3*k
四元数的性质可以和复数作类比。四元数有一个实部,三个虚部,三个虚部为i,j,k,且ijk自己与自己的乘法与复数一样,相互之间的乘法像向量外积一样,如果复平面上的b为虚轴,那这里的ijk就可以看作是一个虚空间,因此可以把四元数用一个虚空间中的向量和一个代表实部的标量表示。复平面上,乘i意味着旋转90度,四元数中,乘一个虚部也会发生对应的旋转,而i,j,k代表着像之前欧拉角一样三种不同性质的旋转,从而单位四元数能够表达空间中任意一个旋转。
它与旋转矩阵之间有变换关系
2.2空间相似变换
2.3空间刚体变换
所谓刚体变换,就是一个可被看做刚体的物体,从一个状态 (位置和朝向),转换为另一个状态的过程。这个过程是旋转+平移,即 a'=Ra+t
变换矩阵T有较为特别的结构:左上角为旋转矩阵,右侧为平移向量,左下角为0向量,右下角为1。
3.投影几何
| 等距变换 | 变换前后欧式距离不变,变换包括旋转和平移两部分 |
| 相似变换 | 是一个等距变换和一个均匀缩放的复合 |
| 仿射变换 | 是一个非奇异线性变换与一个平移变换的复合 |
| 射影变换 | 平面射影变换是关于齐次三维矢量的一种线性变换 |
4.最优化计算
5.测量精度估计















 1698
1698











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









