






- 为什么说自主导航问题就是要处理大量的不确定性?(无人系统的任何状态都测量不准确)智能系统自主性处理的关键:uncertainty的表达和处理
- 环境的不确定性
- 自主导航的实质就是机器人与环境的交互以及对环境所作的相应,而环境是动态、无法预测和不确定的
- 机器人-环境交互
- 感知<==>控制
- 机器人-环境交互
- 自主导航的实质就是机器人与环境的交互以及对环境所作的相应,而环境是动态、无法预测和不确定的
- 传感器测量的不确定性
- 测量噪声
- 量化噪声
- fialsafe(失效)
- 执行器具有不确定性
- 控制噪声
- 控制本身的滞后性、非0净差
- 机械磨损
- 环境变化
- 控制噪声
- 时间不确定性
- 时间基准同步
- 信号时间延迟不确定
- 激光相当于rolling shutter,会产生运动畸变
- 数学模型具有不确定性
- 环境的不确定性
-
贝叶斯公式
-
各项含义
- x代表系统状态、y表示观测
- 后验条件概率
- P(x|y) = p(y|x)p(x)/p(y)
- 先验概率p(x):当前系统状态的概率分布
- 观测似然p(y|x)
- 归一化因子p(y):通常由全概率展开得来
- P(x|y) = p(y|x)p(x)/p(y)
-
全概率展开
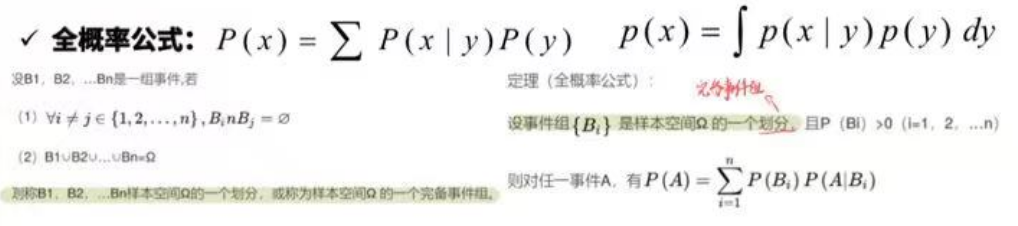
-
例题

- ppt有两个状态变量的推导 p37(状态转移阵有错)
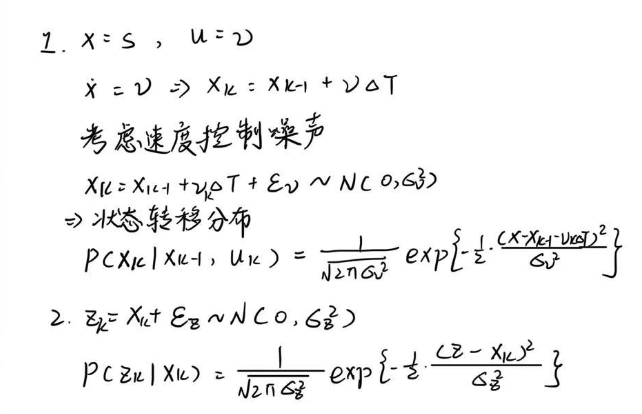
- ppt有两个状态变量的推导 p37(状态转移阵有错)
-
Bayes Filter推导
- 前提:xt为t时刻状态,zt为t时刻观测,ut为t-1到t时刻世家的控制作用
-
Ⅱ数学基础

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









