







-
执行系统
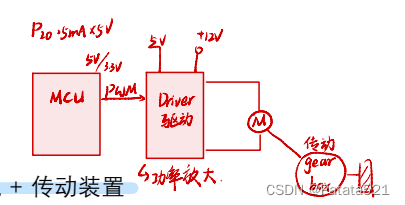
- 机器人关节可看作一个执行系统,可以看作以下几个部分
- 执行系统= 电源+功率放大器+伺服电机+传动装置
- 机器人关节可看作一个执行系统,可以看作以下几个部分
-
-
常见三类驱动方式
- 液压(大型关节驱动)
- 优点
- 快速响应好、结构简单易于标准化、节流效率较高、负载能力大
- 缺点
- 液压密封问题,一定条件下有火灾风险
- 应用领域
- 喷涂工业机器人
- 大负载工业机器人
- 优点
- 气动(大型关节驱动)
- 优点
- 快速响应较好、结构简单,易于标准化、安装要求不太高、成本低
- 缺点
- 高于10个大气压有爆炸风险
- 应用领域
- 点位控制搬运机器人
- 优点
- 电动(伺服电机,中小型关节驱动)
- 优点
- 结构简单、控制灵活、精度高
- 缺点
- 对于直流有刷电器防爆性能较差
- 应用领域
- 各类精度较高的弧焊、装配工业机器人
- 优点
- 液压(大型关节驱动)
-
常见电机种类
- 伺服电机
- 永磁直流伺服电机(直流有刷伺服电机)
- 优点
- 体积小、精度高、低速时扭矩高、响应速度快
- 运行平稳、低噪声效率高、变压范围大,频率可调
- 缺点
- 成本高、结构复杂、需要维护、对环境要求较高
- 直流电机工作原理
- 基于电磁感应定律和安培定律,在定子磁场中,电流通过转子上的电枢绕组产生安培力,带动转子旋转。当转子上线圈与磁场平行时,继续旋转后,受到磁场方向将改变,此时转子末端通过电刷与换向片交替接触,改变电流方向,使得产生洛伦兹力方向不变,保持转动方向不变。
- 优点
- 无刷直流伺服电机
- 结构
- 定子、转子、静态整流器
- 优点
- 转动惯量小、启动电压低、空载电流小、寿命长、噪声低
- 结构
- 交流伺服电机
- 感应异步交流
- 永磁同步交流
- 永磁直流伺服电机(直流有刷伺服电机)
- 步进电机
- 伺服电机
-
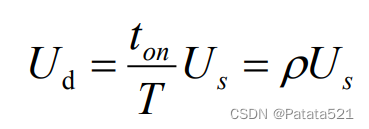
PWM调速控制原理
- 速度调节:
-
-
-
-
- ρ:占空比
- 转向调节:
- H桥驱动
- PWM+传感器构成伺服系统
- 开环伺服系统
- 半闭环伺服系统(半伺服驱动的基本组成及控制原理简述)
- 属于闭环系统,半闭环==>采用间接测量方法
- 检测元件与伺服电机同轴相连,检测电机的角位移/角速度,推算执行器的实际位移/速度
-
-
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 773
773

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









