







- 设计控制器的过程

-
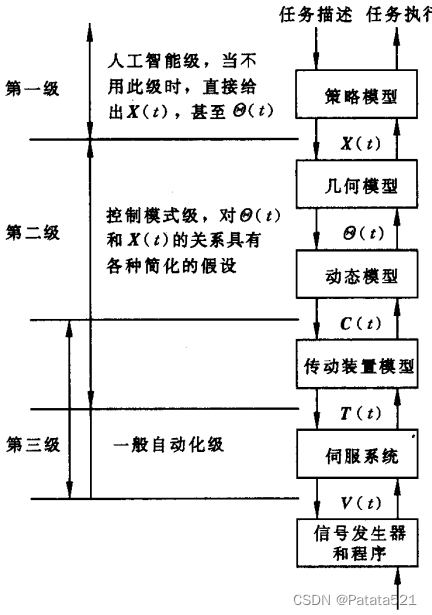
- X(t)工作空间
- θ(t)关节变量
- C(t)关节力矩
- T(t)电机力矩
- V(t)电机控制电流
- 控制的分级
-
- 第一级:人工智能级
- 如何解决由任务产生x(t)的问题
- 路径规划问题
- 第二级:控制模式级
- 主要解决由x(t)到θ(t)或关节力矩C(t)问题
- 涉及运动学、动力学建模
- 第三级:伺服系统级
- 解决在θ(t)或C(t)已知情形下,通过V(t)控制产生电机力矩T(t)
- 机器人常用两种伺服控制系统
- 直流电机伺服控制
- 液压传动伺服控制
- 第一级:人工智能级
- 位置控制(单关节)
- 按空间分
- 关节空间和操作空间的位置控制
- 按控制对象分
- 单关节
- 设计时考虑稳态误差补偿问题
- 多关节
- 考虑耦合惯量补偿问题
- 单关节
- 控制方法
- PID
- 改善控制效果方法
- 前馈控制
- 按空间分
![]()
-
-
-
- 计算力矩控制
- 全控制
- 考虑所有关节耦合
-
- 两类控制任务
- PTP
- CP
-
- 柔顺控制方法
- 三大类方法
- 基本柔顺控制
- 刚性控制
- 主动刚性控制
- 通过闭环力反馈系统改变自身刚度
- 被动刚性控制
- 弹簧和消震器
- 主动刚性控制
- 阻抗控制
- 根据机械臂末端的位置/速度和末端作用力之间的动态关系,调整反馈位置误差、速度误差或刚度来控制作用力,以使机械手末端呈现出需要的刚性和阻尼
- 约束的种类&如何区分(对力进行分析建模)
- 自然约束
- 由物体的几何特性或作业结构特性等引起的对机械手的约束
- 人为约束
- 人为施加的约束,用来确定作业结构中的期望运动的力或轨迹的形式
- 对于每一个自由度
- 如果其位置是自然约束,那么力必然是人为约束;若力是自然约束,那么位置必然为人为约束。因此,自然约束和人为约束的数目均等于柔顺坐标系的自由度数(一般为6)。
- 旋转==>力矩,平移==>力
- 对于自然约束
- 加力后可以移动==>自然约束为力,否则为速度
- 加力后可以绕某轴旋转==>自然约束为转矩,否则为角速度
- 如果其位置是自然约束,那么力必然是人为约束;若力是自然约束,那么位置必然为人为约束。因此,自然约束和人为约束的数目均等于柔顺坐标系的自由度数(一般为6)。
- 如何区分?
- 判断约束是否需要外部控制
- 不需要==>自然约束
- 需要 ==>人为约束
- 判断约束是否可调整
- 可调整 ==>人为约束
- 不可调整==>自然约束
- 判断约束是否需要外部控制
- 自然约束
- 力和位置混合控制
- 力和位置混合控制的实现思想是什么?
- 在柔顺坐标空间将任务分解为某些自由度的位置/运动控制和另一些自由度的力控制
- 并在任务空间分别进行位置控制和力控制的计算
- 然后将计算结果转换到关节空间合并为统一的关节控制力矩,驱动机械手以实现所需要的柔顺功能。
- 力和位置混合控制的实现思想是什么?
- 刚性控制
- 先进柔顺控制
- 智能柔顺控制
- 基本柔顺控制
- 三大类方法















 2321
2321











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









