







5.▲轨迹规划
-
轨迹规划
- 含义
- 属于机器人的底层规划
- 基本不涉及人工智能问题
- 在机械手运动学和动力学基础上,讨论在关节空间和笛卡尔空间中机器人运动的轨迹规划和轨迹生成方法
- 轨迹的定义(trajectory)
- 机械手在运动过程中的位移、速度和加速度
- 轨迹规划的定义
- 根据作业任务要求,计算出预期的运动轨迹的方法/过程
- 含义
-
机械手的运动
- 工具坐标系{T}相对于工作坐标系{S}的运动
-
规划问题
- 两类任务(任务角度)
- PTP(点到点)
- 任务
- 抓放运动
- 点表示工作坐标系的位姿
- 任务
- CP(连续轨迹)
- 任务
- 弧焊、喷漆 etc.
- 沿特定的路径运动
- 路径约束是在笛卡尔坐标系中给定的
- 关节驱动器在关节空间中受控
- 任务
- PTP(点到点)
- 还需考虑问题
- 障碍物约束
- 运动学约束
- 轨迹规划需要解决的问题(起点、终点、必须经过点)
- 使机器人能够从起始状态运动到目标状态
- 使机器人能绕开障碍物,并经过制定的某些必须经过的点完成相应的作业任务
- 在完成以上任务的前提下,尽量优化机器人的运动轨迹
- 轨迹规划与运动学和控制系统的关系
- 与运动学
- 轨迹规划过程中,不断应用逆运动学把直角坐标转换为关节坐标和关节角度
- 关节角度是该关节控制的期望值
- 与控制系统的关系
- 根据规划结果(逆运动学推算结果),关节角的大小要作为关节控制系统的命令
- 与运动学
- 两类任务(任务角度)
-
规划空间描述
- 关节空间
- 将关节变量表示成时间的函数,并规划它的一阶和二阶时间导数
- 缺点
- 机械臂在两点之间的运动不可预知
- 笛卡尔空间
- 将末端位姿、速度和加速度表示为时间的函数,在每一个中间点处都要求解机械臂逆运动学方程,计算出一系列的关节量
- 优点
- 直观
- 缺点
- 规划计算量大、有奇点时系统会崩溃
- 关节空间
-
关节空间的轨迹插值(点到点)
-
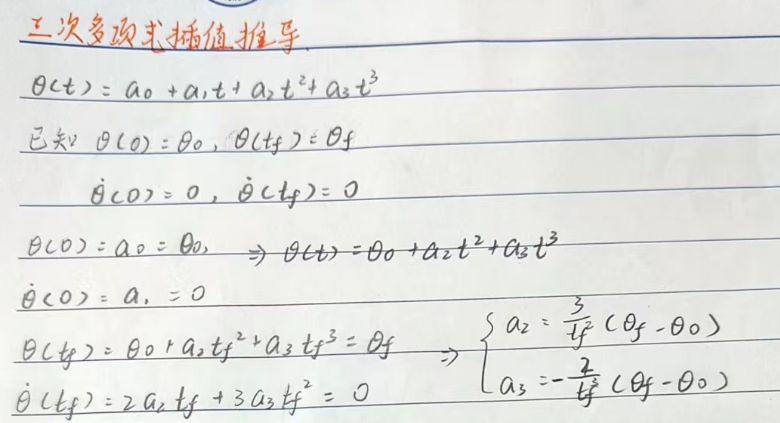
三次多项式插值
- 已知条件
- 起始点关节角度,角速度
- 终点关节角度,角速度
- 三次多项式

- 推导
- 已知条件
-
五次多项式插值
- 如果对于运动轨迹的要求更为严格,约束条件增多,那么三次多项式就不能满足需要,必须用更高阶的多项式对运动轨迹的路径段进行插值。
- 五阶增加了角加速度的约束
- 对于对称轨迹可以减少一个自由度
-
-
-
抛物线过渡的线性插值
- 单纯线性插值将导致在节点处关节运动速度不连续,加速度无限大
- 在每个节点的邻域内增加一段抛物线的缓冲区段
- 推导
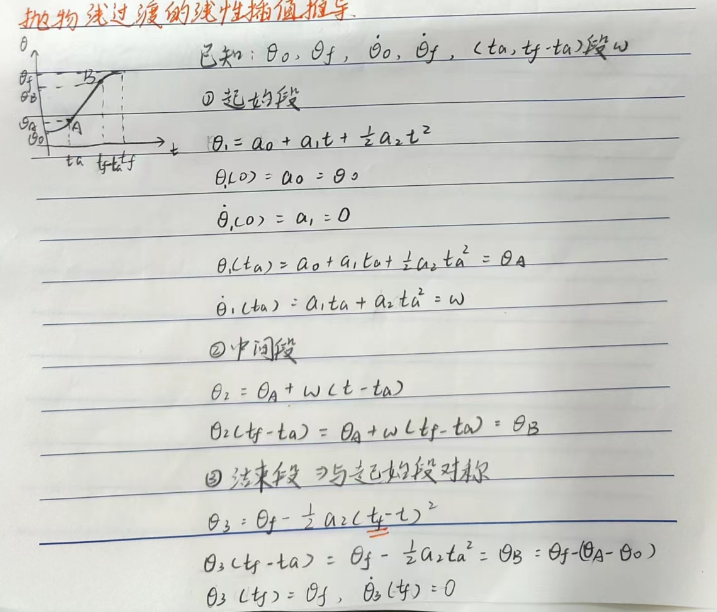
- 先写出每一转折点的角度、角速度表示
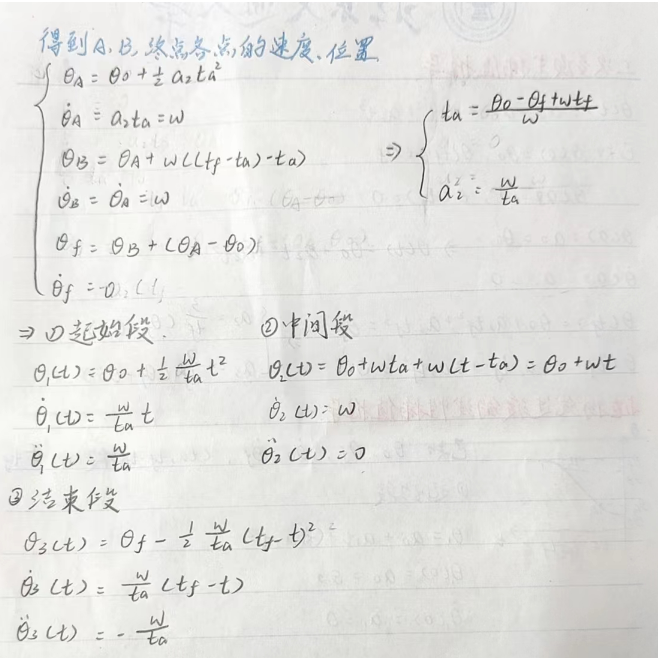
- 记住ta的公式
- (初-末+w*总时间)/w
- 先写出每一转折点的角度、角速度表示
-
-
笛卡尔系下的轨迹规划
- 作业是用end-effector的笛卡尔坐标系节点序列规定的==>表示末端位姿的齐次变换阵
- 两个节点之间的直线运动
- 公式推导
- 实现D(1)变换的方法
- 基于微分运动学的雅可比矩阵,将操作空间的增量变换分解
- 分解为一个平移和两个旋转的合成

- 平移:是将坐标原点从起点移动到终点
- 第一个旋转:是将末端执行器的坐标系与期望姿态的a轴对准
- 第二个旋转:是末端执行器坐标系绕其自身a轴转到o轴对齐















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









