









目录
平衡小车电路框架
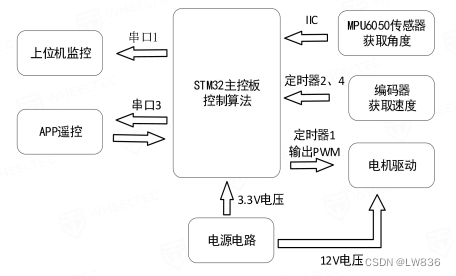
硬件部分:STM32,MPU6050陀螺仪,TB6612FNG电机驱动,电池12V,霍尔编码器直流电机,以及支架,面包板,杜邦线.
引脚资源分配
| IO编号 | 资源说明 | 外设 | 备注 |
| A12 | 普通IO | MPU6050的INT引脚 | 检测MPU6050是否产生数据就绪中断 |
| B8、B9 | 普通IO | MPU6050 | 软件模拟IIC的SCL与SDA |
| A8、B15、B14 | PWMA、IO | 左轮电机 | 电机控制信号:PWM大小、电机方向 |
| A11、B12、B13 | PWMB、IO | 右轮电机 | 电机控制信号:PWM大小、电机方向 |
| A0、A1 | TIM2_CH1、CH2 | 左轮编码器 | 编码器采集 |
| B6、B7 | TIM4_CH1、CH2 | 右轮编码器 | 编码器采集 |
| 其他任意 | 普通IO | OLED显示屏 | 软件模拟IIC的 |
1 电机驱动代码
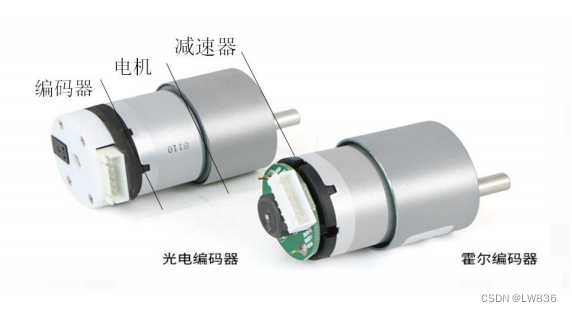
在此平衡小车项目中,使用的是带霍尔编码器的直流电机以及TB6612FNG电机驱动器件.
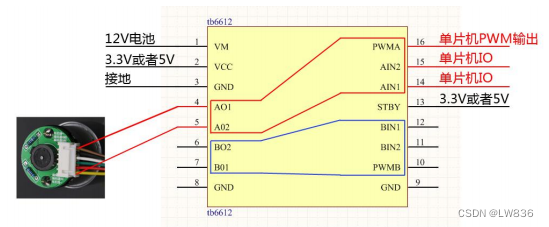
TB6612FNG具有大电流的MOSFET-H桥结构,双通道带你路输出,可同时驱动2个电机, 相比 L298N 的热耗性和外围二极管续流电路, 它无需外加散热片,外围电路简单,只需外接电源滤波电容就可以直接驱动电机,对于 PWM 信号输入频率范围,高达 100 kHz 的频率更是足以满足大部分需求.
电机驱动使用TIM1, 初始化为 PWM 输出,CH1,CH4 输出双路 10KHZ 的 PWM 控制电机
TB6612.c
#include "./TB6612/TB6612.h"
/**************************************************************************
函数功能:TB6612初始化函数
入口参数:定时器3计数上限 定时器3预分频系数
返回 值:无
**************************************************************************/
void TB6612_Init(int arr, int psc)
{
GPIO_InitTypeDef GPIO_InitStructure; //定义一个引脚初始化的结构体
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStrue; //定义一个定时中断的结构体
TIM_OCInitTypeDef TIM_OCInitTypeStrue; //定义一个PWM输出的结构体
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能GPIOB时钟,GPIOB挂载在APB2时钟下,在STM32中使用IO口前都要使能对应时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); //使能通用定时器1时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE);
//TB6612控制方向引脚
GPIO_InitStructure.GPIO_Pin=BIN1_PIN|BIN2_PIN|AIN1_PIN|AIN2_PIN;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP; //引脚输入输出模式为推挽输出模式
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //引脚输出速度为50MHZ
GPIO_Init(BIN1_PORT, &GPIO_InitStructure); //根据上面设置好的GPIO_InitStructure参数,初始化引脚
GPIO_ResetBits(BIN1_PORT, BIN1_PIN|BIN2_PIN|AIN1_PIN|AIN2_PIN); //初始化设置引脚低电平
//TB6612PWM输出引脚
GPIO_InitStructure.GPIO_Pin=PWMB_PIN|PWMA_PIN;//引脚PA8,PA11
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; //复用推挽输出模式,定时器功能为引脚复用功能
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //定义该引脚输出速度为50MHZ
GPIO_Init(PWMAB_PORT, &GPIO_InitStructure); //初始化引脚GPIOB1
TIM_TimeBaseInitStrue.TIM_Period=arr; //计数模式为向上计数时,定时器从0开始计数,计数超过到arr时触发定时中断服务函数
TIM_TimeBaseInitStrue.TIM_Prescaler=psc; //预分频系数,决定每一个计数的时长
TIM_TimeBaseInitStrue.TIM_CounterMode=TIM_CounterMode_Up; //计数模式:向上计数
TIM_TimeBaseInitStrue.TIM_ClockDivision=TIM_CKD_DIV1; //一般不使用,默认TIM_CKD_DIV1
// TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStrue); //根据TIM_TimeBaseInitStrue的参数初始化定时器TIM3
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseInitStrue);
TIM_OCInitTypeStrue.TIM_OCMode=TIM_OCMode_PWM1; //PWM模式1,当定时器计数小于TIM_Pulse时,定时器对应IO输出有效电平
TIM_OCInitTypeStrue.TIM_OCPolarity=TIM_OCNPolarity_High; //输出有效电平为高电平
TIM_OCInitTypeStrue.TIM_OutputState=TIM_OutputState_Enable; //使能PWM输出
TIM_OCInitTypeStrue.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值
// TIM_OC4Init(TIM3, &TIM_OCInitTypeStrue); //根TIM_OCInitTypeStrue参数初始化定时器3通道4
TIM_OC4Init(TIM1, &TIM_OCInitTypeStrue);
TIM_OC1Init(TIM1, &TIM_OCInitTypeStrue);
TIM_CtrlPWMOutputs(TIM1,ENABLE); //MOE 主输出使能
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Disable); //CH4预装载使能 使能后改变TIM_Pulse(即PWM)的值立刻生效,不使能则下个周期生效
TIM_OC4PreloadConfig(TIM1, TIM_OCPreload_Disable);
TIM_ARRPreloadConfig(TIM1, ENABLE); //TIM3预装载使能
TIM_Cmd(TIM1, ENABLE); //使能定时器TIM3
}
/**************************************************************************
函数功能:设置TIM3通道4PWM值
入口参数:PWM值
返回 值:无
**************************************************************************/
void SetPWM(int PWM_L, int PWL_R)
{
if(PWM_L>0) BIN1=1, BIN2=0; //前进
else BIN1=0, BIN2=1; //后退
PWMB=ABS(PWM_L);
if(PWL_R>0) AIN2=0, AIN1=1; //前进
else AIN2=1, AIN1=0; //后退
PWMA=ABS(PWL_R);
}
static int ABS(int n)
{
int temp;
if(n<0) temp=-n;
else temp=n;
return temp;
}
TB6612.h
#ifndef __TB6612_H
#define __TB6612_H
#include "sys.h"
#define BIN1_PIN GPIO_Pin_13
#define BIN1_PORT GPIOB
#define BIN2_PIN GPIO_Pin_12
#define BIN2_PORT GPIOB
#define AIN1_PIN GPIO_Pin_14
#define AIN1_PORT GPIOB
#define AIN2_PIN GPIO_Pin_15
#define AIN2_PORT GPIOB
#define PWMA_PIN GPIO_Pin_11
#define PWMB_PIN GPIO_Pin_8
#define PWMAB_PORT GPIOA
#define PWMB TIM1->CCR1 //PA8
#define PWMA TIM1->CCR4 //PA11
#define BIN2 PBout(12)
#define BIN1 PBout(13)
#define AIN2 PBout(15)
#define AIN1 PBout(14)
void TB6612_Init(int arr, int psc);
void SetPWM(int PWM_L, int PWL_R);
#endif
2 编码器代码
电机集成霍尔传感器,能够读出脉冲计数,从而得到电机速度。在程序中, 我们使用 M 法测速,即在一定时间周期内,测量编码器输出的脉冲个数M1来计 算转速,用个数除以时间就可以得到编码器输出脉冲的频率。频率F1 = M1/Tc。 因存在测量时间内首尾变个脉冲问题,可能会有两个脉冲的误差,但在高速下可 以忽略不计。
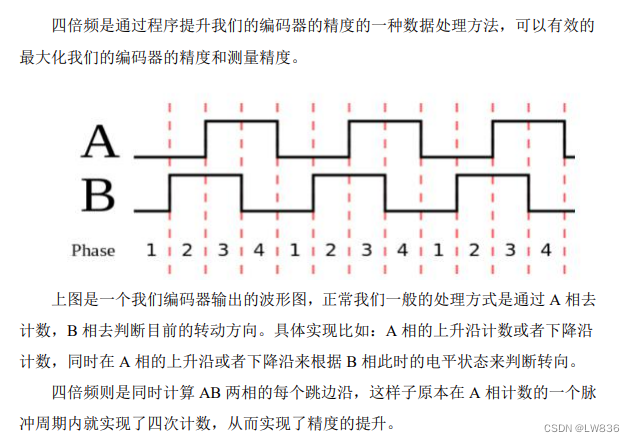
假设电机转动一圈可以产生 Z 个脉冲,其中 Z=4*编码器线数*电机减速比, 这里 4 代表四倍频,同时采集 A 和 B 相的上升沿和下降沿,用频率F1除以一圈 脉冲个数就可以得到单位时间内的转速(单位:转/分钟):
编码器使用TIM2,TIM4,初始化为正交编码器模式,硬件采集编码器 4, 2 的数据
MotorEncoder.c
#include "./MotorEncoder/MotorEncoder.h"
//外部变量 extern说明改变量已在其它文件定义
extern int Encoder, CurrentPosition; //当前速度、当前位置
extern int TargetVelocity, TargetCircle, CurrentPosition, Encoder,PWM; //目标速度、编码器读数、PWM控制变量
extern float Velocity_Kp, Velocity_Ki, Velocity_Kd; //相关速度PID参数
extern float Position_Kp, Position_Ki, Position_Kd; //相关位置PID参数
extern int MotorRun; //允许电机控制标志位
/**************************************************************************
Function: Initialize TIM2 to encoder interface mode
Input : none
Output : none
函数功能:把TIM2初始化为编码器接口模式
入口参数:无
返回 值:无
**************************************************************************/
void Encoder_Init_TIM2(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);//使能定时器4的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//使能PB端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1; //端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //根据设定参数初始化GPIOA
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Prescaler = 0x0; // 预分频器
TIM_TimeBaseStructure.TIM_Period = ENCODER_TIM_PERIOD; //设定计数器自动重装值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;//选择时钟分频:不分频
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM向上计数
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_EncoderInterfaceConfig(TIM2, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising,
TIM_ICPolarity_Rising);//使用编码器模式3
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_ICFilter = 10; //滤波10
TIM_ICInit(TIM2, &TIM_ICInitStructure);
TIM_ClearFlag(TIM2, TIM_FLAG_Update);//清除TIM的更新标志位
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
//Reset counter
TIM_SetCounter(TIM2,0);
TIM_Cmd(TIM2, ENABLE);
}
/**************************************************************************
函数功能:编码器初始化函数
入口参数:无
返回 值:无
**************************************************************************/
void Encoder_Init_Tim4(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //定义一个引脚初始化的结构体
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;//定义一个定时器初始化的结构体
TIM_ICInitTypeDef TIM_ICInitStructure; //定义一个定时器编码器模式初始化的结构体
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //使能TIM4时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能CPIOB时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7; //TIM4_CH1、TIM4_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据GPIO_InitStructure的参数初始化GPIOB
TIM_TimeBaseStructure.TIM_Period = ENCODER_TIM_PERIOD; //设定计数器自动重装值
TIM_TimeBaseStructure.TIM_Prescaler = 0; // 预分频器
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //选择时钟分频:不分频
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct的参数初始化定时器TIM4
TIM_EncoderInterfaceConfig(TIM4, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising); //使用编码器模式3:CH1、CH2同时计数,为四分频
TIM_ICStructInit(&TIM_ICInitStructure); //把TIM_ICInitStruct 中的每一个参数按缺省值填入
TIM_ICInitStructure.TIM_ICFilter = 10; //设置滤波器长度
TIM_ICInit(TIM4, &TIM_ICInitStructure); //根TIM_ICInitStructure参数初始化定时器TIM4编码器模式
TIM_ClearFlag(TIM4, TIM_FLAG_Update);//清除TIM的更新标志位
TIM_ITConfig(TIM4, TIM_IT_Update, ENABLE); //更新中断使能
TIM_SetCounter(TIM4,0); //初始化清空编码器数值
TIM_Cmd(TIM4, ENABLE); //使能定时器4
}
/**************************************************************************
Function: Read encoder count per unit time
Input : TIMX:Timer
Output : none
函数功能:单位时间读取编码器计数
入口参数:TIMX:定时器
返回 值:速度值
**************************************************************************/
int Read_Encoder(u8 TIMX)
{
int Encoder_TIM;
switch(TIMX)
{
case 2: Encoder_TIM= (short)TIM2 -> CNT; TIM2 -> CNT=0;break;
case 4: Encoder_TIM= (short)TIM4 -> CNT; TIM4 -> CNT=0;break;
default: Encoder_TIM=0;
}
return Encoder_TIM;
}
/**************************************************************************
函数功能:TIM4中断服务函数
入口参数:无
返回 值:无
**************************************************************************/
void TIM4_IRQHandler(void)
{
if(TIM4->SR&0X0001)//溢出中断
{
}
TIM4->SR&=~(1<<0);//清除中断标志位
}
/**************************************************************************
函数功能:TIM2中断服务函数
入口参数:无
返回 值:无
**************************************************************************/
void TIM2_IRQHandler()
{
if(TIM2->SR&0X0001)//溢出中断
{
}
TIM2->SR&=~(1<<0);//清除中断标志位
}
MotorEncoder.h
#ifndef __MOTORENCODER_H
#define __MOTORENCODER_H
#include "sys.h"
#include "./TB6612/TB6612.h"
#define ENCODER_TIM_PERIOD (u16)(65535) //不可大于65535 因为F103的定时器是16位的。
void Encoder_Init_Tim4(void);
void Encoder_Init_TIM2(void);
int Read_Encoder(u8 TIMX);
#endif3 MPU6050中断代码
EXTI.c
#include "./EXTI/EXTI.h"
/**************************************************************************
Function: External interrupt initialization
Input : none
Output : none
函数功能:外部中断初始化
入口参数:无
返回 值:无
**************************************************************************/
void MPU6050_EXTI_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //外部中断,需要使能AFIO时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIO端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; //端口配置
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //上拉输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //根据设定参数初始化GPIO
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA,GPIO_PinSource12);
EXTI_InitStructure.EXTI_Line=EXTI_Line12;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;//下降沿触发
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure); //根据EXTI_InitStruct中指定的参数初始化外设EXTI寄存器
NVIC_InitStructure.NVIC_IRQChannel = EXTI15_10_IRQn; //使能按键所在的外部中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02; //抢占优先级2,
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x01; //子优先级1
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道
NVIC_Init(&NVIC_InitStructure);
}
EXTI.h
#ifndef __EXTI_H
#define __EXIT_H
#include "sys.h"
#define INT PAin(12) //PA12连接到MPU6050的中断引脚
void MPU6050_EXTI_Init(void); //外部中断初始化
#endif
4 OLED以及MPU6050代码
OLED代码可参考之前历程OLED-IIC软硬件
MPU6050网上教程多,能读到数据即可
读取数据函数如下
//得到dmp处理后的数据(注意,本函数需要比较多堆栈,局部变量有点多)
//pitch:俯仰角 精度:0.1° 范围:-90.0° <---> +90.0°
//roll:横滚角 精度:0.1° 范围:-180.0°<---> +180.0°
//yaw:航向角 精度:0.1° 范围:-180.0°<---> +180.0°
//返回值:0,正常
// 其他,失败
u8 MPU6050_DMP_Get_Data(float *pitch,float *roll,float *yaw)//(5MS 200HZ调用一下,给 DEFAULT_MPU_HZ 频率保持一致,或者int中断引脚读取)
{ // (此处在主函数中一直调用,在中断函数里更新 频率未变)
unsigned char more;
unsigned long sensor_timestamp;
long quat[4];
if(dmp_read_fifo(gyro, accel, quat, &sensor_timestamp, &sensors,&more))return 1;
/* Gyro and accel data are written to the FIFO by the DMP in chip frame and hardware units.
* This behavior is convenient because it keeps the gyro and accel outputs of dmp_read_fifo and mpu_read_fifo consistent.
**/
/*if (sensors & INV_XYZ_GYRO )
send_packet(PACKET_TYPE_GYRO, gyro);
if (sensors & INV_XYZ_ACCEL)
send_packet(PACKET_TYPE_ACCEL, accel); */
/* Unlike gyro and accel, quaternions are written to the FIFO in the body frame, q30.
* The orientation is set by the scalar passed to dmp_set_orientation during initialization.
**/
if(sensors&INV_WXYZ_QUAT)
{
q0 = quat[0] / q30; //q30格式转换为浮点数
q1 = quat[1] / q30;
q2 = quat[2] / q30;
q3 = quat[3] / q30;
//计算得到俯仰角/横滚角/航向角
*pitch = asin(-2 * q1 * q3 + 2 * q0* q2)* 57.3; // pitch
*roll = atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2* q2 + 1)* 57.3; // roll
*yaw = atan2(2*(q1*q2 + q0*q3),q0*q0+q1*q1-q2*q2-q3*q3) * 57.3; //yaw
Gyro_Balance=gyro[0]; //更新平衡角速度,前倾为正,后倾为负
Gyro_Turn=gyro[2]; //更新转向角速度
Acceleration_Z=accel[2]; //更新Z轴加速度计
}else return 2;
return 0;
}
5 中断服务控制函数和PID函数
Control.c
#include "./Control/Control.h"
#include "./EXTI/EXTI.h"
extern float Velocity_Kp, Velocity_Ki, Velocity_Kd; //相关速度PID参数
extern float Velocity_Left,Velocity_Right; //车轮速度(mm/s)
float Pitch,Roll,Yaw;
/**************************************************************************
Function: Control function
Input : none
Output : none
函数功能:所有的控制代码都在这里面
5ms外部中断由MPU6050的INT引脚触发 (inv_mpu.c)
严格保证采样和数据处理的时间同步
入口参数:无
返回 值:无
**************************************************************************/
int EXTI15_10_IRQHandler(void)
{
int Balance_Pwm,Velocity_Pwm,Turn_Pwm,Motor_Left,Motor_Right; //平衡环PWM变量,速度环PWM变量,转向环PWM变
int Speed_Left,Speed_Right;
if(EXTI_GetITStatus(EXTI_Line12) != 0)
{
if(INT==0)
{
EXTI->PR=1<<12;
MPU6050_DMP_Get_Data(&Pitch,&Roll,&Yaw);
Speed_Left = -Read_Encoder(4);
Speed_Right = Read_Encoder(2);
Get_Velocity_Form_Encoder(Speed_Left,Speed_Right);//编码器读数转速度(mm/s)
Balance_Pwm=Balance(Pitch,Gyro_Balance); //平衡PID控制 Gyro_Balance平衡角速度极性:前倾为正,后倾为负
Velocity_Pwm=Velocity(Speed_Left,Speed_Right); //速度环PID控制 记住,速度反馈是正反馈,就是小车快的时候要慢下来就需要再跑快一点
Turn_Pwm=Turn(Gyro_Turn); //转向环PID控制
Motor_Left=Balance_Pwm+Velocity_Pwm+Turn_Pwm; //计算左轮电机最终PWM
Motor_Right=Balance_Pwm+Velocity_Pwm-Turn_Pwm; //计算右轮电机最终PWM
Motor_Left=PWM_Limit(Motor_Left,8000,-8000);
Motor_Right=PWM_Limit(Motor_Right,8000,-8000); //PWM限幅
SetPWM(Motor_Left,Motor_Right);
}
}
}
/**************************************************************************
Function: Encoder reading is converted to speed (mm/s)
Input : none
Output : none
函数功能:编码器读数转换为速度(mm/s)
入口参数:无
返回 值:无
**************************************************************************/
void Get_Velocity_Form_Encoder(int encoder_left,int encoder_right)
{
float Rotation_Speed_L,Rotation_Speed_R; //电机转速 转速=编码器读数(5ms每次)*读取频率/倍频数/减速比/编码器精度
Rotation_Speed_L = encoder_left*Control_Frequency/EncoderMultiples/Reduction_Ratio/Encoder_precision;
Velocity_Left = Rotation_Speed_L*PI*Diameter_67; //求出编码器速度=转速*周长
Rotation_Speed_R = encoder_right*Control_Frequency/EncoderMultiples/Reduction_Ratio/Encoder_precision;
Velocity_Right = Rotation_Speed_R*PI*Diameter_67; //求出编码器速度=转速*周长
}
/**************************************************************************
Function: Vertical PD control
Input : Angle:angle;Gyro:angular velocity
Output : balance:Vertical control PWM
函数功能:直立PD控制
入口参数:Angle:角度;Gyro:角速度
返回 值:balance:直立控制PWM
**************************************************************************/
int Balance(float Angle,float Gyro)
{
float Angle_bias,Gyro_bias;
int balance;
Angle_bias=0-Angle; //求出平衡的角度中值 和机械相关
Gyro_bias=0-Gyro;
balance=Balance_Kp/100*Angle_bias+Gyro_bias*Balance_Kd/100; //计算平衡控制的电机PWM PD控制 kp是P系数 kd是D系数
return balance;
}
int Velocity(int encoder_left,int encoder_right)
{
static float velocity,Encoder_Least,Encoder_bias,Movement;
static float Encoder_Integral,Target_Velocity;
//================速度PI控制器=====================//
Encoder_Least =0-(encoder_left+encoder_right); //获取最新速度偏差=目标速度(此处为零)-测量速度(左右编码器之和)
Encoder_bias *= 0.84; //一阶低通滤波器
Encoder_bias += Encoder_Least*0.16; //一阶低通滤波器,减缓速度变化
Encoder_Integral +=Encoder_bias; //积分出位移 积分时间:10ms
if(Encoder_Integral>10000) Encoder_Integral=10000; //积分限幅
if(Encoder_Integral<-10000) Encoder_Integral=-10000; //积分限幅
velocity=Encoder_bias*Velocity_Kp/100+Encoder_Integral*Velocity_Ki/100; //速度控制
return velocity;
}
/**************************************************************************
Function: Turn control
Input : Z-axis angular velocity
Output : Turn control PWM
函数功能:转向控制
入口参数:Z轴陀螺仪
返回 值:转向控制PWM
**************************************************************************/
int Turn(float gyro)
{
static float Turn_Target,turn,Turn_Amplitude=54;
float Kp=Turn_Kp,Kd; //修改转向速度,请修改Turn_Amplitude即可
//===================转向PD控制器=================//
turn=Turn_Target*Kp/100-gyro*Kd/100;//结合Z轴陀螺仪进行PD控制
return turn; //转向环PWM右转为正,左转为负
}
int PWM_Limit(int IN,int max,int min)
{
int OUT = IN;
if(OUT>max) OUT = max;
if(OUT<min) OUT = min;
return OUT;
}
Control.h
#ifndef __CONTROL_H__
#define __CONTROL_H__
#include "sys.h"
#define PI 3.14159265 //PI圆周率
#define Control_Frequency 200.0 //编码器读取频率
#define Diameter_67 67.0 //轮子直径67mm
#define EncoderMultiples 4.0 //编码器倍频数
#define Encoder_precision 13.0 //编码器精度 13线
#define Reduction_Ratio 30.0 //减速比30
#define Perimeter 210.4867 //周长,单位mm
int Velocity(int encoder_left,int encoder_right);
void Get_Velocity_Form_Encoder(int encoder_left,int encoder_right);
int Balance(float Angle,float Gyro);
int Turn(float gyro);
int PWM_Limit(int IN,int max,int min);
#endif /*__CONTROL_H__*/
以上代码中的sys.h,是MPU6050 DMP移植后其中的一个库,此项目中我只用来包含需要头文件和传递全局变量,按自己需要进行头文件包含和函数传递.
这里利用的是陀螺仪采集完数据会产生中断,(这里设置陀螺仪采集数据的周期为5ms (MPU6050 inv_mpu.c 初始化函数里面设置),然后就触发单片机中断,进入中断完成相应的控制。
这里也可以不用陀螺仪中断,直接采用定时器定时10ms,然后进入定时器中断函数完成相应的控制。
进入中断后先清除中断标志位,再读取陀螺仪和编码器的数据,将数据再压入PID控制器进行计算,计算完成后将相应的值加载到电机上就可以了,进入中断调整一次小车的姿态,一直不断的调整,这样就大概完成了平衡小车的制作。
PID极性和数据调节
平衡小车的PID函数由三部分构成,分别为直立环,速度环,转向环三部分构成,直立环就是让小车角度趋近0,速度环就是让电机速度趋近0,转向环就是让电机保持角速度为零。
直立环调节: 先确定 Balance_Kp 的极性。若小车倾斜时也向倾斜的方向加速,那么极性 就是对的,反之,即为错的, Balance_Kd同理; 然后首先调节 Balance_Kp,每次增大 Balance_Kp 直至小车出现低频抖动, 保留此时的值。增大 Balance_Kd 直至出现高频抖动,此时记录直立环的参数值, 乘以 0.6 作为直立环最终参数。
速度环调节:首先也是确认极性, 先把直立环和转向环屏蔽,单独调试速度环。当转动一只轮子时,另外一只轮子速度相同方向转动,那么速度环极性就是对的; 把上述所得的直立环最终参数保留,即乘以 0.6 的参数。然后开始调节速度 环。每次增大速度环的Velocity_Kp值,其中Velocity_Ki值也要设定为Velocity_Kp 的 1/200,观察小车是否能立在原地。若增大到小车出现抖动,而且用手推动小 车会发生大幅回摆,说明此参数不可取,应减少到适合的数值
转向环调节: 屏蔽直立环和转向环,单独调试转向环。当我们用手摁着小车在地上旋转时,若出现电机对抗我们的旋转的现象,那就说明极性是对的,若很容易旋转,说明 转向环帮助了我们旋转,这个时候极性是错的。取 Kd 参数为 0.6,用手摁着小 车在地上旋转,可以发现,此时电机出现了对抗我们的旋转的现象,说明此时极 性是对的,Kd 参数取正; 保留调试好的直立环和速度环,开始调节转向环 Kd 参数的大小。逐渐加大 转向环 Kd 参数,令小车前进,观察小车走直线的效果。若小车出现了高频抖动 的现象,说明此参数不可取,取前面的相对理想的结果
6 main 函数
#include "stm32f10x.h"
#include "./OLED/OLED.h"
#include "./LED/bsp_led.h"
#include "Delay.h"
#include "inv_mpu.h"
#include "./TB6612/TB6612.h"
#include "./MotorEncoder/MotorEncoder.h"
#include "bsp_usart.h"
#include "./Control/Control.h"
#include "sys.h"
#include "./EXTI/EXTI.h"
int MotorRun; //允许电机控制标志位
float Velocity_Left,Velocity_Right; //车轮速度(mm/s)
Balance_Kp=39000,Balance_Kd=108,Velocity_Kp=151000,Velocity_Ki=755,Turn_Kp=0,Turn_Kd=0;//PID参数(放大100倍)
extern float Gyro_Balance,Gyro_Turn,Acceleration_Z;
extern float Pitch,Roll,Yaw;
int main(void)
{
delay_init();
LED_GPIO_Config();
MPU6050_DMP_Init();
TB6612_Init(7199, 0); //电机驱动外设初始化 使用定时器1
OLED_Init();
delay_ms(2000); //延迟等待初始化完成
MotorRun = 0;
Encoder_Init_Tim4();
Encoder_Init_TIM2();
delay_ms(2000);
MPU6050_EXTI_Init(); //外部中断初始化
LED_G(1);
while(1)
{
}
}最终平衡小车效果演示
平衡小车效果演示

















 1728
1728

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









