







本文主要是对
ROS海龟跟随(坐标变换)
(https://blog.csdn.net/weixin_45842867/article/details/125434346)
文章中的内容进行了简单删改,并针对新手添加了基础的说明
1.各文件详细代码
功能包创建完成后,首先在包内新建一个scripts文件夹,放置python文件
new_turtle.py
#! /usr/bin/env python
#coding:utf-8
#1.导包
import rospy
from turtlesim.srv import Spawn, SpawnRequest, SpawnResponse
if __name__ == "__main__":
# 2.初始化 ros 结点
rospy.init_node("service_call_p")
# 3.创建服务客户端
client = rospy.ServiceProxy("/spawn",Spawn)
# 4.等待服务启动
req = SpawnRequest()
# 5.创建请求数据
# 在(1,1)位置生成小海龟2
req.x = 1.0
req.y = 1.0
req.theta = 0
req.name = "turtle2"
client.wait_for_service()
# 6.发送请求并处理响应
try:
response = client.call(req)
rospy.loginfo("乌龟创建成功,名字是:%s",response.name)
except Exception as e:
rospy.logerr("服务调用失败....")主要功能为:在指定位置生成小海龟
control.py
#!/usr/bin/env python
#coding:utf-8
#注意:前两行注释可以识别
#程序功能:第二个乌龟跟随第一个乌龟运动
import sys
import rospy
import math
from turtlesim.srv import Spawn
from geometry_msgs.msg import Twist
from turtlesim.msg import Pose
from turtlesim.srv import Kill
global pose1
global pose2
global pub
global last_pose
def turtlesimInfoCallback1(msg):
global pose1
pose1.x = msg.x
pose1.y = msg.y
pose1.theta = msg.theta
rospy.loginfo("turtle1:x=%f,y=%f,z=%f",pose1.x,pose1.y,pose1.theta) #订阅第一个乌龟的姿态
#订阅第二个乌龟的姿态 并向其发送运动指令
def turtlesimInfoCallback2(msg):
global dis_sum
global pose2
pose2.x = msg.x
pose2.y = msg.y
pose2.theta = msg.theta
rospy.loginfo("turtle2:x=%f,y=%f,z=%f",pose2.x,pose2.y,pose2.theta) #第二个乌龟的姿态
rotated = Pose() #旋转
deviation =Pose() #偏移
end_pose =Pose() #最终
c = math.cos(pose2.theta) #cos
s = math.sin(pose2.theta) #sin
rotated.x = c*pose1.x+s*pose1.y
rotated.y = -1*s*pose1.x+c*pose1.y
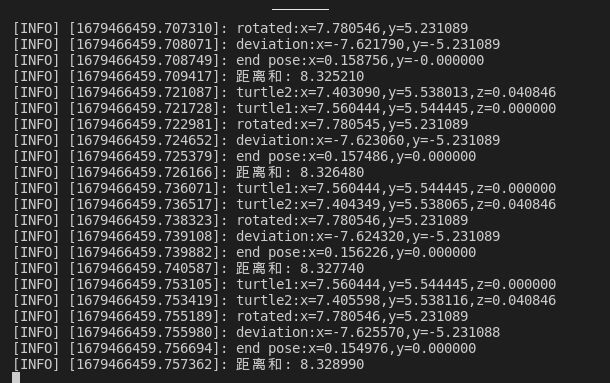
rospy.loginfo("rotated:x=%f,y=%f",rotated.x,rotated.y) #海龟1 在海龟2坐标系下的 坐标
deviation.x = -1*(c*pose2.x+s*pose2.y)
deviation.y = -1*((-1)*s*pose2.x+c*pose2.y)
rospy.loginfo("deviation:x=%f,y=%f",deviation.x,deviation.y) #原点到海龟2的距离
end_pose.x=rotated.x+deviation.x #旋转+偏移
end_pose.y=rotated.y+deviation.y
rospy.loginfo("end_pose:x=%f,y=%f",end_pose.x,end_pose.y)
vel_msg = Twist()
vel_msg.linear.x = 0.5*math.sqrt(end_pose.x * end_pose.x + end_pose.y * end_pose.y)
vel_msg.angular.z = 4*math.atan2(end_pose.y,end_pose.x)
distance = math.sqrt((last_pose.x-pose2.x)*(last_pose.x-pose2.x)+(last_pose.y-pose2.y)*(last_pose.y-pose2.y))
dis_sum = distance+dis_sum
last_pose.x = pose2.x
last_pose.y = pose2.y
rospy.loginfo("距离和: %f ",dis_sum) #距离和
pub.publish(vel_msg) #发布速度信息 使第二个乌龟运动
if __name__ == "__main__":
pose1 = Pose() #给全局变量赋初值
pose2 = Pose()
#为计算运行总里程而添加
last_pose = Pose()
last_pose.x = 1
last_pose.y = 1
dis_sum = 0
rospy.init_node("control")
pub = rospy.Publisher('/turtle2/cmd_vel',Twist,queue_size=10)
#订阅乌龟位置和角度
rospy.Subscriber('/turtle1/pose',Pose,turtlesimInfoCallback1)
rospy.Subscriber('/turtle2/pose',Pose,turtlesimInfoCallback2)
rospy.spin() #类似于while(1)
说明见:https://blog.csdn.net/weixin_45842867/article/details/125434346
乌龟运动路程:上一时刻乌龟位置与这一时刻乌龟位置的累加和
turtle.launch
<launch>
<!-- 1、准备工作:启动乌龟的 GUI 节点与键盘控制结点; -->
<node pkg="turtlesim" type="turtlesim_node" name="turtle1" output="screen" />
<node pkg="turtlesim" type="turtle_teleop_key" name="key" output="screen"/>
<!-- 2、需要调用服务生成一只新的乌龟; -->
<node pkg="test_pkg" type="new_turtle.py" name="turtle2" output="screen"/>
<!-- 3、订阅两只海龟的位置信息,并发送速度指令; -->
<node pkg="test_pkg" type="control.py" name="control" output="screen"/>
</launch>CMakeLists.txt
## Mark executable scripts (Python etc.) for installation
## in contrast to getsetup.py, you can choose the destination将含有该注释的代码段修改为
## Mark executable scripts (Python etc.) for installation
## in contrast to getsetup.py, you can choose the destination
catkin_install_python(PROGRAMS
scripts/control.py
scripts/new_turtle.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)package.xml
该文件未作修改
2.调试过程中遇到的问题
在运行launch文件后,发生报错
ModuleNotFoundError: No module named 'rospkg'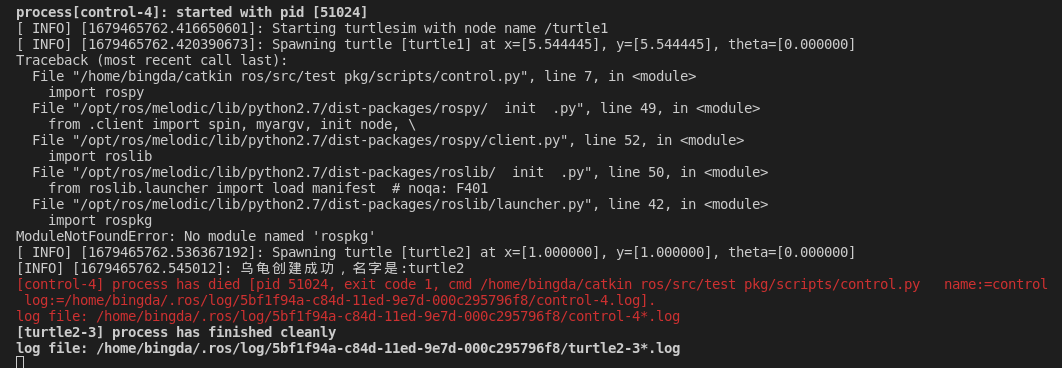
(小乌龟并不会进行跟随)
查阅资料可知,原因为:
base 环境下缺少rospkg包,所以需要安装rospkg包
但针对该问题,因
第一行的路径是指定运行脚本的解释器的位置
第二行指定Encoding
原代码为:
#!/usr/bin/env python3
#coding:utf-8修改为:
#!/usr/bin/env python
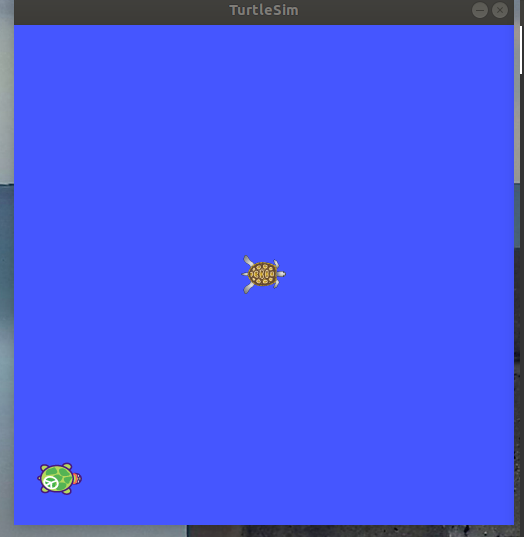
#coding:utf-8对第一行路径进行了修改,重新启动launch文件,报错消失,运行结果如图

















 943
943











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











