






1. 环境配置
安装主要看的这两个博客:
pcl、opencv安装完ros后都有,不用再安装。Ubuntu 18.04安装gtsam版本最好安装4.0.2的,我最开始安装的时候直接get clone github...结果安装的是最新版的,安装的时候就会有问题。
推荐一个一键安装ros的方法:
2. lvi-sam编译运行过程遇到的问题
2.1 [lvi_sam_imuPreintegration-3] process has died [pid 3943, exit code 127, cmd...
如图:
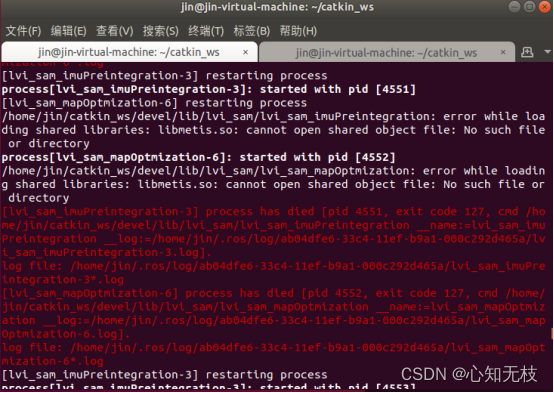
解决方法:
sudo cp /usr/local/lib/libmetis.so /opt/ros/melodic/lib/查找问题的时候也看到了另一个解决方法,但这个我没试,我用第一种方法就解决了:
2.2 RLException: [run.launch] is neither a launch file in package [lvi_sam] nor is [lvi_sam] a launch file name The traceback for the exception was written to the log file
如图:

解决方法:
运行roslaunch lvi_sam run.launch之前打开终端设置ros开发环境,输入:
source devel/steup.bash2.3 [ INFO] [1719411534.566775311]: ----> Lidar Map Optimization Started. QObject::connect: Cannot queue arguments of type 'QVector<int> (Make sure 'QVector<int>' is registered using qRegisterMetaType().)
不知道为啥,重启了虚拟机就好了,真不错。看网上这个问题也挺多的遇到的。
2.4 运行实例只有轨迹图,没有点云地图
在看其它博客的时有说原因可能是:运行lio-sam的时候一播放数据包rviz进程崩溃。应该是虚拟机的问题,双系统从未遇到这种问题。多试几次可能成功。
运行lio-sam播放数据包的时候只有轨迹没有全局点云地图,怀疑也是因为虚拟机的原因。这个只是影响实时观看的观感,可以开启局部地图观看效果。
在主机上运行了一下,可以正常显示点云地图,应该就是虚拟机的问题。
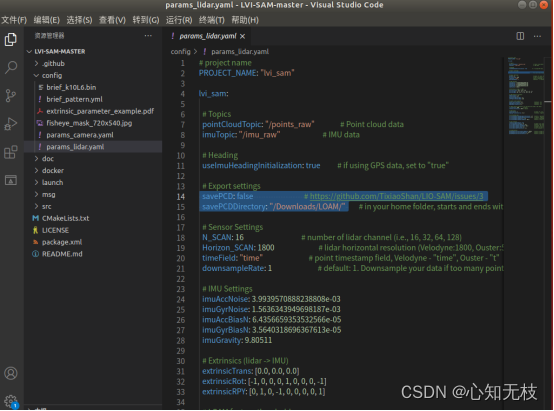
3. 生成点云图pcd文件
在lvi-sam-master文件的config中的params_lidar.yaml文件,更改一下设置换成true,还有保存路径更改一下。
4. Ubuntu死机
最开始是在虚拟机上运行的,后面换到主机上运行,但是主机的配置不太好,运行的时候就死机。
解决方法:
安全重启,同时按住 Crtl 和 Alt 键,按住不放,再依次按下SysRq 键(有的键盘是PrtSc),R 键,E 键,I 键,S 键,U 键,B 键,这些步骤做完后,系统就会安全重启。















 2479
2479

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









