







 这篇博客介绍了如何使用一键脚本来简化ROS(Robot Operating System)在Ubuntu 16.04(Kinetic)和18.04(Melodic)上的安装过程。通过执行特定命令,可以完成系统源更换、ROS安装、rosdep更新以及环境设置,最后通过运行小乌龟测试来验证安装是否成功。
这篇博客介绍了如何使用一键脚本来简化ROS(Robot Operating System)在Ubuntu 16.04(Kinetic)和18.04(Melodic)上的安装过程。通过执行特定命令,可以完成系统源更换、ROS安装、rosdep更新以及环境设置,最后通过运行小乌龟测试来验证安装是否成功。
ros的安装一直以来都是想学习ros的同学面对的第一道难关,但鱼哥的一键安装,真的会给我们初学者很大的便利,命令如下:
wget http://fishros.com/install -O fishros && . fishros
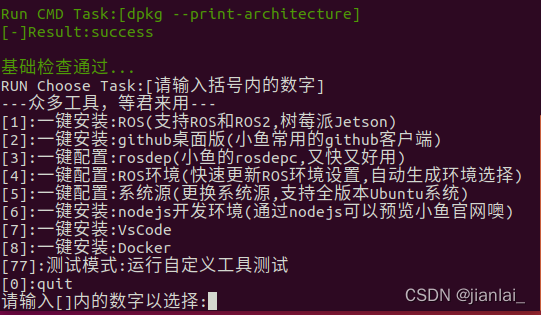
依次进行:
5,更换系统源,更换系统源并删除旧源
1,ROS安装,系统版本是Ubuntu16.04--安装kinetic,Ubuntu18.04--安装melodic,继续选择完整安装
3,rosdep更新,安装rosdepc,避免被墙。进行sudo rosdepc init,rosdepc update
4,更新ROS环境设置
最后,运行小乌龟检测是否安装成功

















 3153
3153

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









