







一、CAPL函数使用CAN帧类型
Data;Error;Remote;Overload。
二、Message声明
/*标准帧*/
message 0xA m1; //用消息id声明can消息 十六进制
message 100 m2; //用消息id声明can消息 十进制
message EngineData m3; //用总线上加载的dbc数据库(EngineData)里消息名称声明can消息
message 0x100 msg1={DLC=8}; //定义消息数据长度
/*扩展帧*/
message 100x msg1; //消息id后面加x,表示扩展帧 十进制
message 0x123456x msg2; //消息id后面加x,表示扩展帧 十六进制
message * msg1; //“ * ” 表示声明一条任何ID的报文(不确定报文ID) 用于存储CAN信息
message * msg1 = { DLC = 8};
/*报文发送至总线上*/
message * msg1;
msg1.dlc = 8;
message.ID = 0x100;
output(msg1); //报文发送至总线上必须要有ID三、Message属性
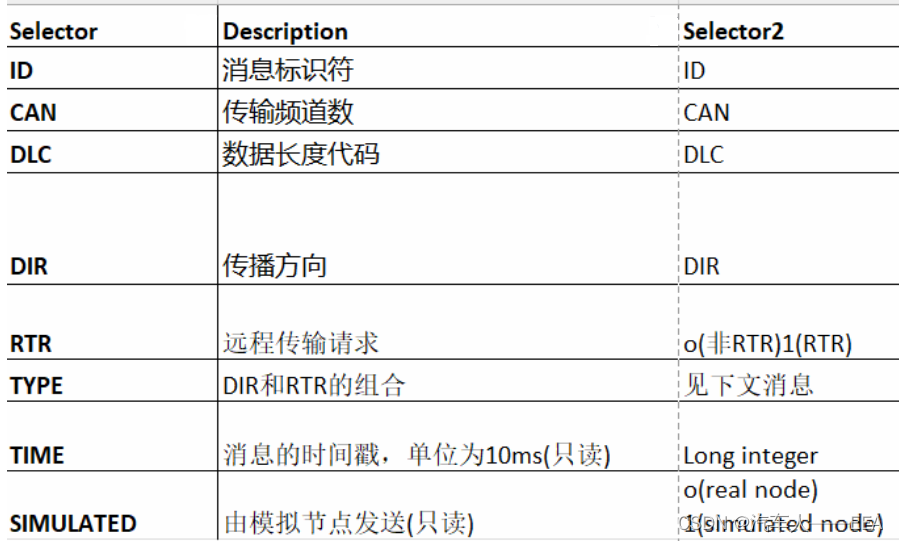
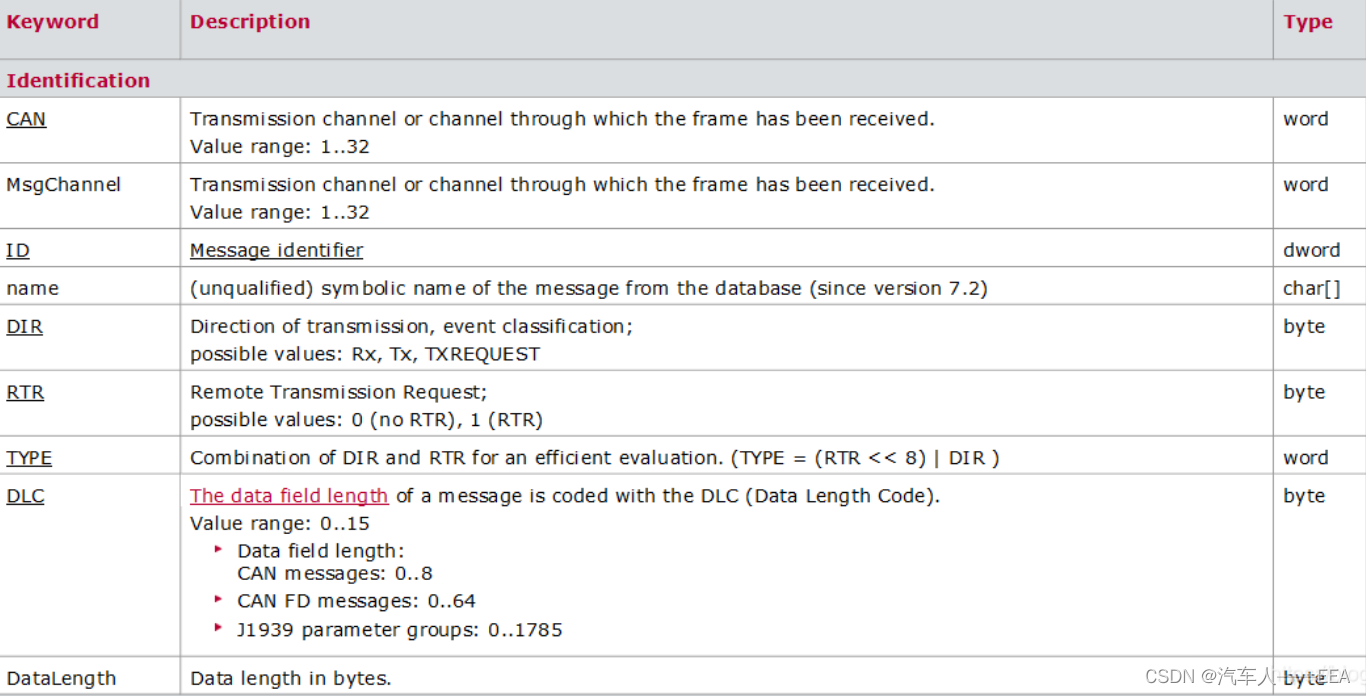
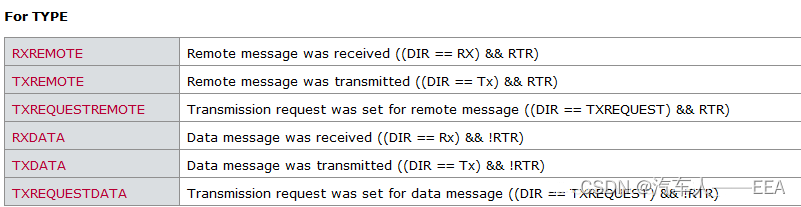 四、On message
四、On message
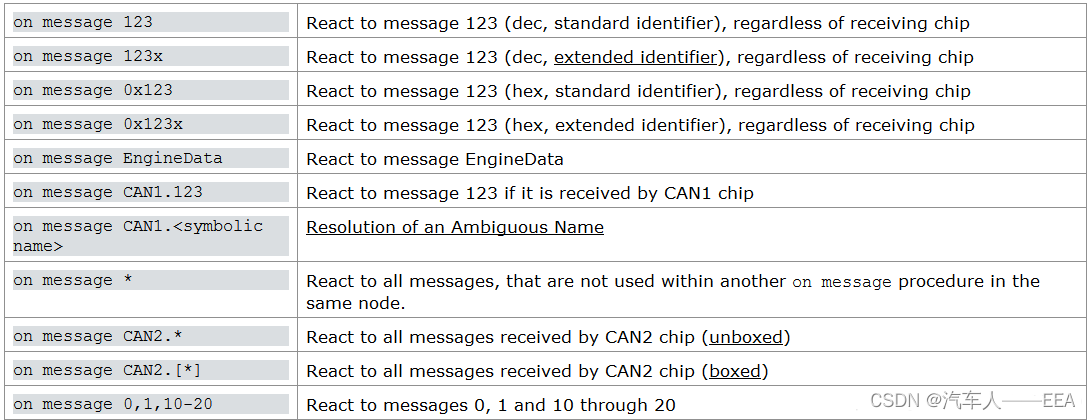
on message 123 /*接收到123(10进制)这个ID的报文时执行*/
on message 0x441 /*接收到0x441(16进制)这个ID的报文时执行*/
on message BCM /*接收到BCM(工程dbc文件中的报文名)这个报文时执行*/
on message* /*接收到任意报文时都执行(注意*与message之间没有空格)*/
on message 0x300-0x444 /*接收到这个范围内的ID报文时执行*/
{
write(“Received %x”,this.id); /*打印接收到的报文id*/
write(“Received Message %d in total!”,count);
}on message 0x189
{
write("this.id = %x",this.id);//获取报文ID
write("this.name = %s",this.name);//获取报文名字
write("this.can = %d",this.can);//获取当前报文在哪路can上
write("this.dir = %d",this.dir);//获取当前报文是TX还是RX
write("this.dlc = %d",this.dlc);//获取当前报文的报文长度
write("this.dlc = %x",this.Byte(0));//获取当前报文的第一个字节
write("this.dlc = %x",this.QWord(0));//获取当前报文的第一个QWord(8个字节)
}五、错误报文
on errorFrame:
错误帧由工具的CAN硬件检测,可以通过使用on errorFrame事件进行处理。当收到一个错误报文或者过载报文的时候触发这个事件。用于统计错误帧的数量和时间。

打印错误帧信息:
on errorFrame
{
write("this.time = %fs",this.time/100000.0);//获取时间戳,时间单位是秒
write("this.id = 0x%x",this.ID);
write("this.ErrorPosition_Bit = %d",this.ErrorPosition_Bit);
write("this.ErrorCode = 0x%x",this.ErrorCode);
}错误帧事件过程可以用于分析CAPL节点中的总线错误(频率,事件期间的活动等)
on errorFrame
{
if (this.can == 1 && (timeNow() – pretime) < 100000)
write(“Error frames received less than one second apart on channel 1.”);
}注:
timeNow()描述提供当前模拟时间(最大时间:2^32 * 10微秒= 11小时55分钟49秒672毫秒96微秒)
timeNow()函数和time选择器返回的系统时间以10微秒为单位。



















 1862
1862

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











