







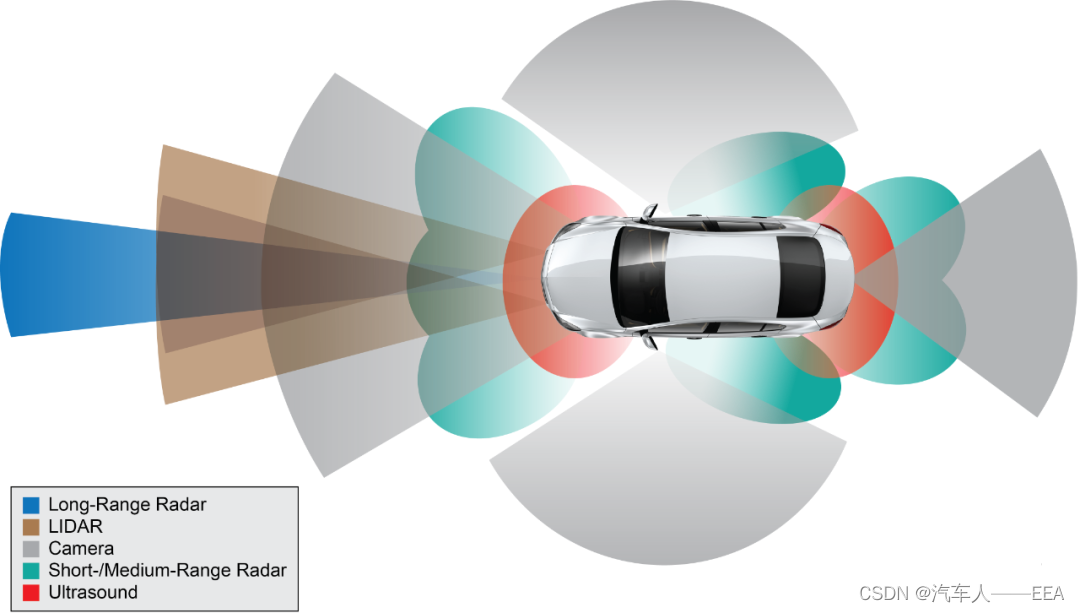
一、环境感知传感器感知范围:
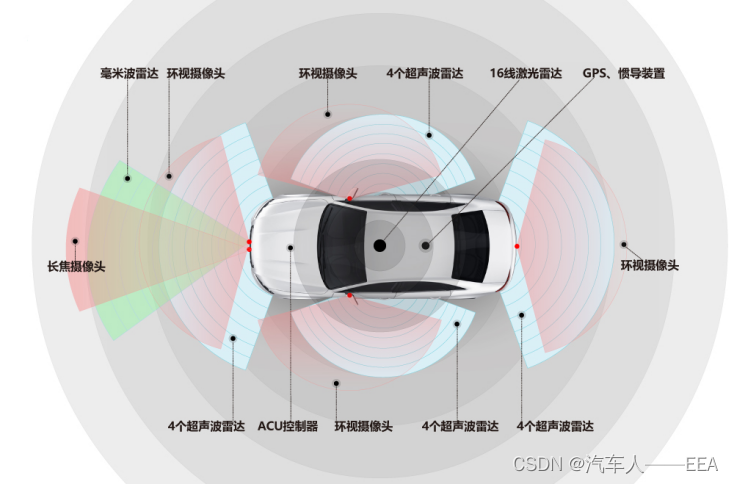
二、智能驾驶车辆传感器布置:
| 方位 | 传感器 | 数量 | 位置 |
| 前部 | 环视摄像头 | 1个 | 前 |
| 长焦摄像头 | 1个 | 内后视镜 | |
| 毫米波雷达(77GHz)-长测距 | 1个 | 前 车辆中轴线 | |
| 毫米波雷达(24GHz)-中短测距 | 2个 | 车辆的前两角 与车辆行驶方向成45夹角 | |
| 超声波雷达-UPA | 4个 | 前 | |
| 顶部 | 激光雷达 | 1个 | 顶部 |
| 两侧 | 环视涉摄像头 | 2个 | 两侧后视镜 |
| 超声波雷达-APA | 4个 | 两侧 每侧各两个(四角) | |
| 尾部 | 超声波雷达-UPA | 4个 | 后 |
| 毫米波雷达(24GHz)-中短测距 | 2个 | 车辆的后两角 与车辆行驶方向成30夹角 | |
| 环视摄像头 | 1个 | 后 | |
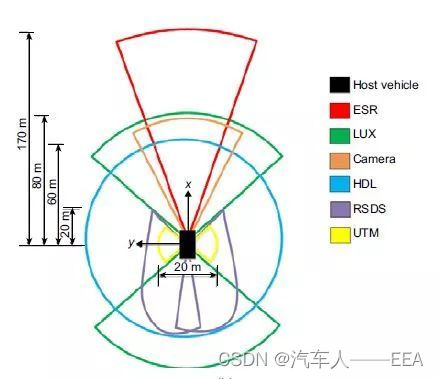
三、各传感器适用范围:
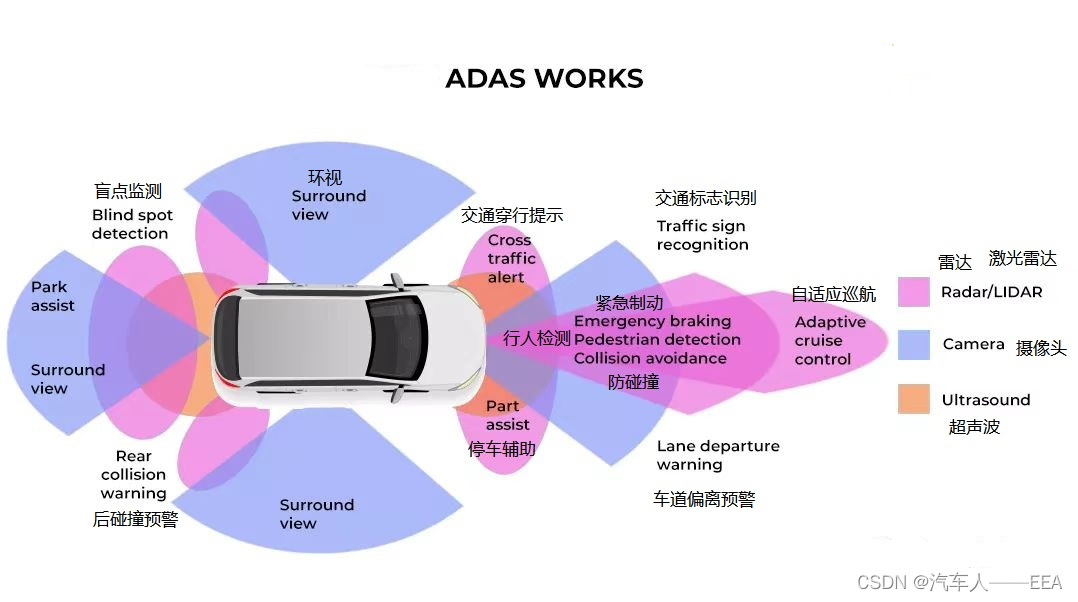
四、各功能对应传感器类型:
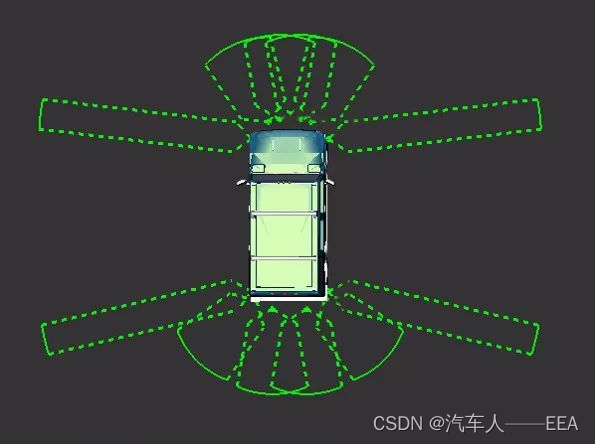
五、超声波雷达布置:



















 714
714

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











