







 超级会员免费看
超级会员免费看
 组合导航中,杆臂参数至关重要,它描述了卫星天线相位中心到POS中心的距离,影响着导航结果的准确性。错误的杆臂值会导致定位、速度和姿态测量误差,特别是在GPS信号中断时。杆臂测量通常采用FRD坐标系,通过IMU测量中心到天线相位中心的投影确定XYZ三个分量。正确的杆臂输入能显著提高解算精度,而忽略杆臂可能导致严重漂移。
组合导航中,杆臂参数至关重要,它描述了卫星天线相位中心到POS中心的距离,影响着导航结果的准确性。错误的杆臂值会导致定位、速度和姿态测量误差,特别是在GPS信号中断时。杆臂测量通常采用FRD坐标系,通过IMU测量中心到天线相位中心的投影确定XYZ三个分量。正确的杆臂输入能显著提高解算精度,而忽略杆臂可能导致严重漂移。
一、影响
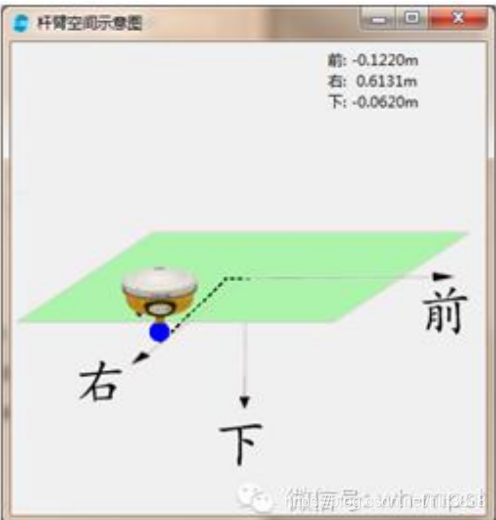
在组合导航领域,杆臂是一个很重要的参数。它的含义是指,当卫星天线与 POS 同载 体刚性运动(即运动过程中两者的相对位置关系始终不变)时,卫星天线相位中心到 POS 中心的向量,可描述为前者在 POS 坐标系下的坐标(X,Y,Z)。该坐标系为右手坐标系, 通常有 “前-右-下” 和 “右-前-上”两种。如 GINS 软件中杆臂在 “前-右-下” 坐标系下的 空间示意图:
由于卫星天线与 POS 中心不在同一点,为了将位置结果统一,必须将两者的原点归算 至同一点。杆臂的作用正在于此,它起着桥梁的作用。以常见的车载移动测绘为例,最终 的结果通常都要归算到 POS 中心,所以在实际作业中尽可能直接和准确地测量 POS 到 GNSS 天线的杆臂,可以用卷尺或全站仪。另外,在系统结构设计时,应使杆臂尽量短,以减小 杆臂测量和杆臂补偿误差。在移动测量系统时,杆臂的大小一般不超过分米量级,其测量 精度一般要达到

 订阅专栏 解锁全文
订阅专栏 解锁全文




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











