






目录
引言
由于这是本人第一篇博客,有很多地方写的不是很好,还请见谅哈~

一、学习准备阶段:
蓝桥杯被认为是对于编程初学者而言非常友好的比赛之一。通过网络上丰富的资源,学生们可以自主学习并提升编程技能。今年四月,我有幸参加了第十四届蓝桥杯单片机省赛,并荣幸地获得了省一的成绩,从而获得了进入国赛的资格。值得一提的是,只有每个省的省一学生才有机会参加国赛,而省一的比例仅占每个省参赛学生的前5%。这个成绩对我来说是一次极大的鼓舞,同时也是对我自学能力和努力付出的肯定。

- 对于单片机完全没有基础的新手,建议购买一块二手的51板子,跟随江协科技等B站UP主的教程初步学习,不需要学得太细致,但要确保对每个定时器计时器的概念有基本理解。
- 对于有一定单片机基础的学生,可以直接购买蓝桥杯官方的比赛专用板子,并跟随小蜜蜂老师等UP主的教程学习,他们的纯手敲代码的讲解非常友好。

如果有上手过单片机的可以直接购买蓝桥杯官方的比赛专用板子,可以上B站跟着小蜜蜂老师,真的强推小蜜蜂老师,老师讲解的都是一步步纯手敲代码,对于新手小白来说非常的友好,而且可以更好的跟上老师的思维。
二、练习阶段:
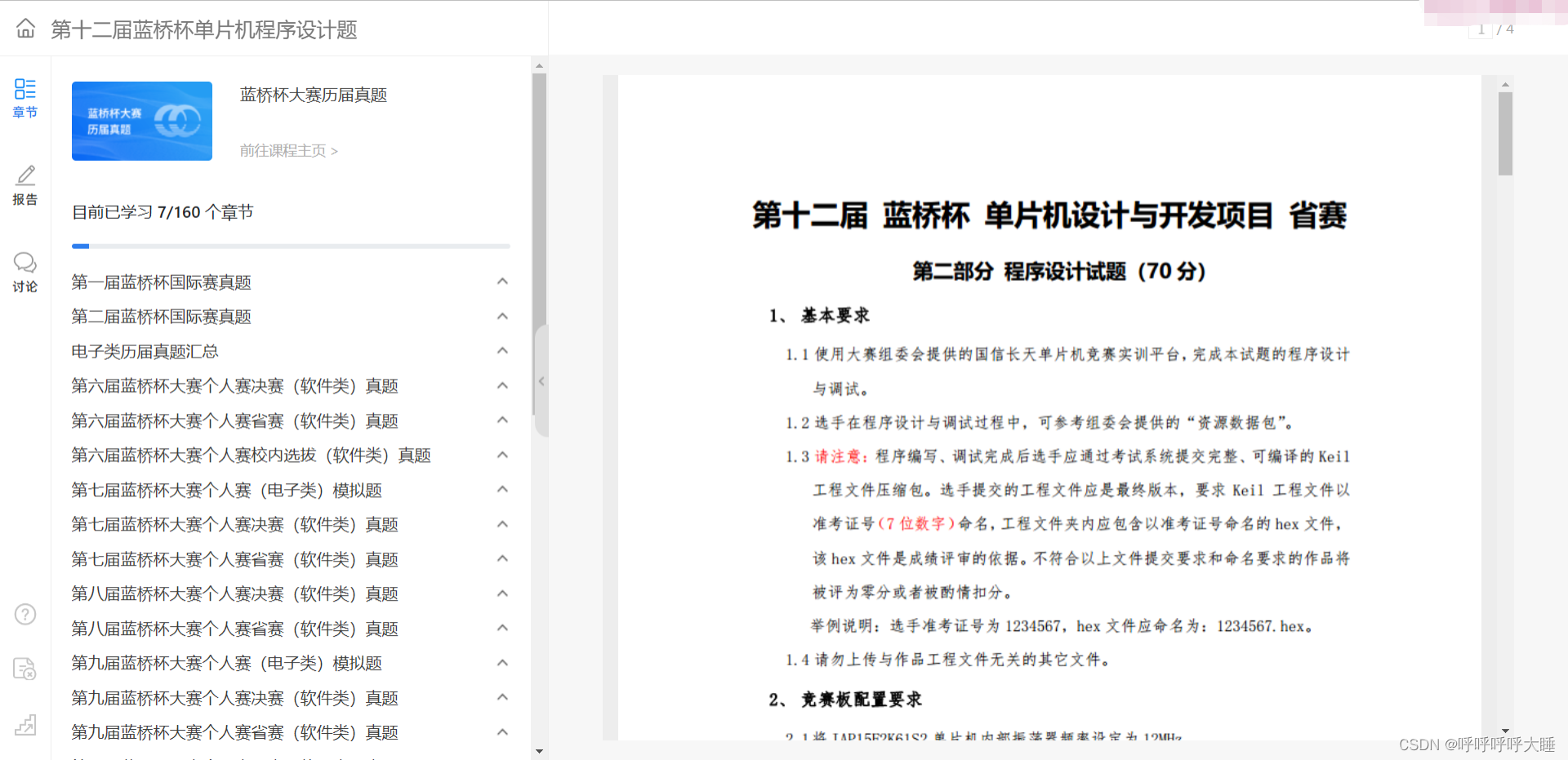
- 针对蓝桥杯历年真题进行大量练习,可以在蓝桥杯官网找到历年真题。
- 参考他人代码思路,但务必自己动手实践,加深理解。
蓝桥杯官网链接 https://dasai.lanqiao.cn/(学习时间1个月即可)
https://dasai.lanqiao.cn/(学习时间1个月即可)

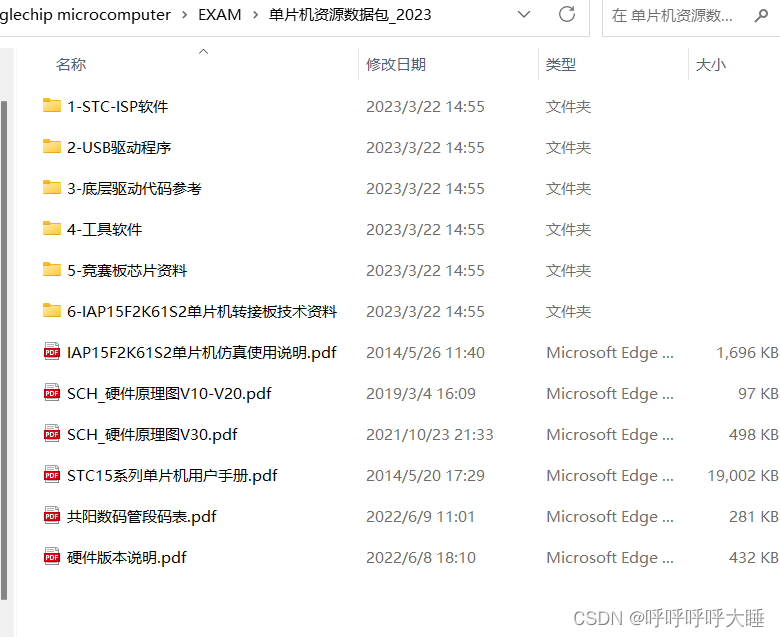
官网的一些驱动文件
三、备赛注意事项:
- 比赛前两个星期,重点准备程序题目,但若想冲击国赛,则需在客观题方面下更多功夫。
- 客观题的准备范围广泛,建议在备赛过程中逐渐加强相关知识的掌握,如模电、数电、单片机、C语言等,同时熟悉官方STC15系列单片机手册。
四、总结
- 蓝桥杯对于初学者非常友好,通过参加比赛可以锻炼编程逻辑思维和自学能力。
- 最重要的不是奖项,而是在解决问题的过程中积累的经验和能力。
在这里我将备赛的经验分享给大家,希望对大家有帮助,祝大家都能在比赛中取得佳绩。

















 5568
5568

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









