






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。当哲学课上老师问你什么是科学,什么是电的时候,不要觉得这些问题搞笑。哲学是科学之母,哲学就是追究终极问题,寻找那些不言自明只有小孩子会问的但是你却回答不出来的问题。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能让人胸中升起一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它居然给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
无人机在三维空间中飞行路径规划是无人机飞行控制的关键问题之一。A星算法是一种常用的路径规划算法,在平面空间中已经被广泛应用。
为了使A星算法可以在三维空间中应用于无人机路径规划,需要对算法进行一定的修改和扩展。首先,需要将空间分为立方体网格,并将每个立方体网格看作一个节点,节点之间的连接关系由相邻的立方体网格确定。然后,需要定义三维空间中的启发式函数,用于评估无人机从当前位置到目标位置的距离。启发式函数的设计需要考虑三维空间中的障碍物和地形等因素。
在实际应用中,还可以通过传感器数据获取实时的环境信息,并结合动态规划的方法,实现无人机在飞行过程中的实时调整和路径优化。同时,还可以考虑无人机的动力学模型和控制策略,进一步提高路径规划的精度和效率。
基于A星算法的无人机三维路径规划算法需要综合考虑空间分割、启发式函数、动态规划和控制策略等方面的内容,并通过实际运行验证算法的有效性和可靠性。在未来的研究中,还可以结合机器学习和人工智能等技术,进一步提升无人机路径规划的智能化水平。
A星算法是一种常用的路径规划算法,可以有效地找到从起点到终点的最优路径。在无人机三维路径规划中,A星算法可以被用来计算无人机在三维空间中的最优路径,以避开障碍物和优化飞行路径。
无人机三维路径规划算法的基本步骤如下:
1. 网格化地图:将三维空间划分为一个网格地图,每个网格代表一个空间单元,无人机可以在网格中移动。
2. 设置起点和终点:确定无人机的起点和终点位置,并将其转化为网格坐标。
3. 初始化A星算法:将起点加入到开放列表中,并设置其代价为0。
4. 循环搜索:在每一次循环中,从开放列表中选择代价最小的节点进行扩展,并将其加入到关闭列表中。然后,对其周围的邻居节点进行评估,并更新其代价和父节点信息。
5. 判断终点:如果终点被加入到关闭列表中,说明找到了最优路径,可以回溯父节点信息得到完整路径。
6. 生成路径:根据父节点信息回溯得到的路径即为无人机的最优路径。
在无人机三维路径规划中,需要考虑无人机的飞行高度、障碍物的避让、风力等因素,可以在A星算法中加入相应的权重来考虑这些因素,以得到更加合理的路径规划结果。
总的来说,基于A星算法的无人机三维路径规划算法可以帮助无人机高效地规划飞行路径,避开障碍物,减少飞行时间和能量消耗,提高飞行效率和安全性。
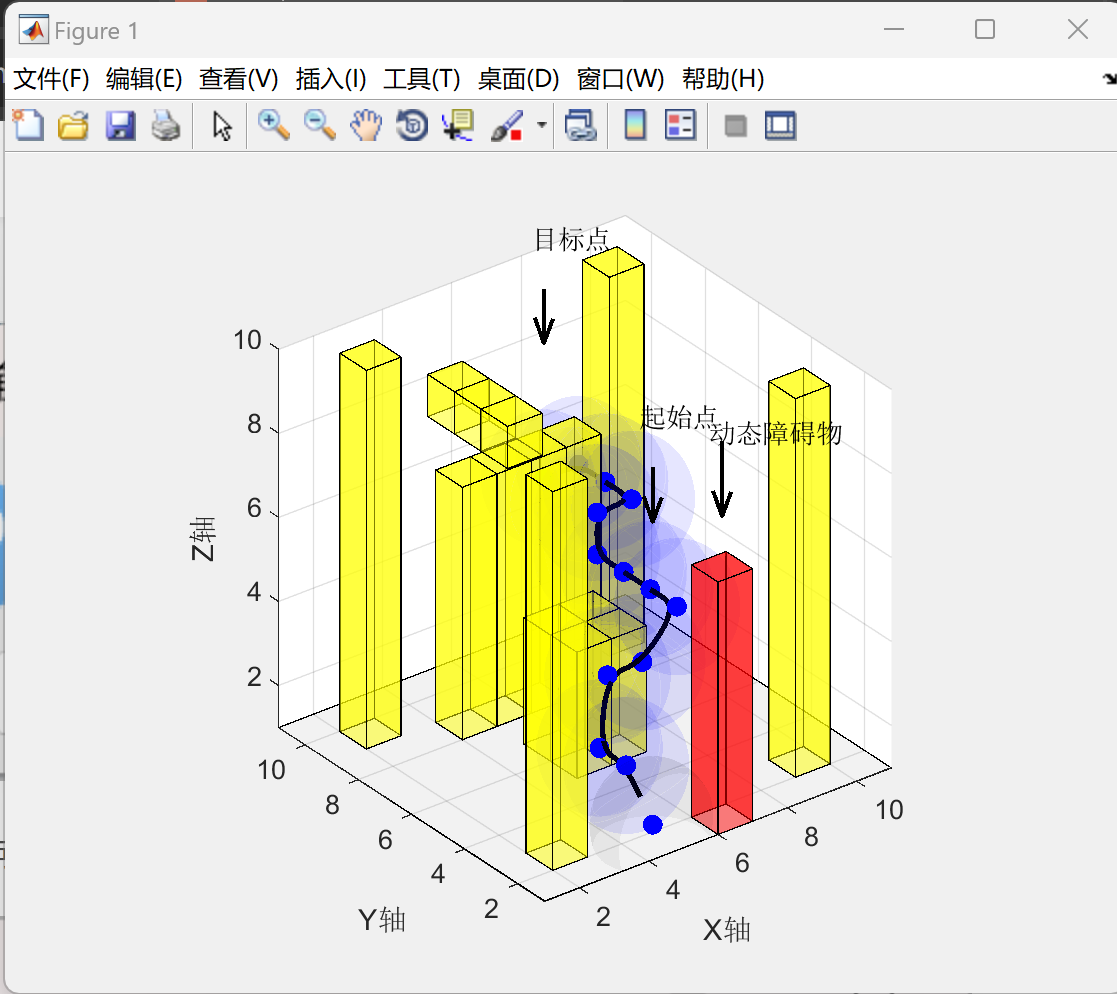
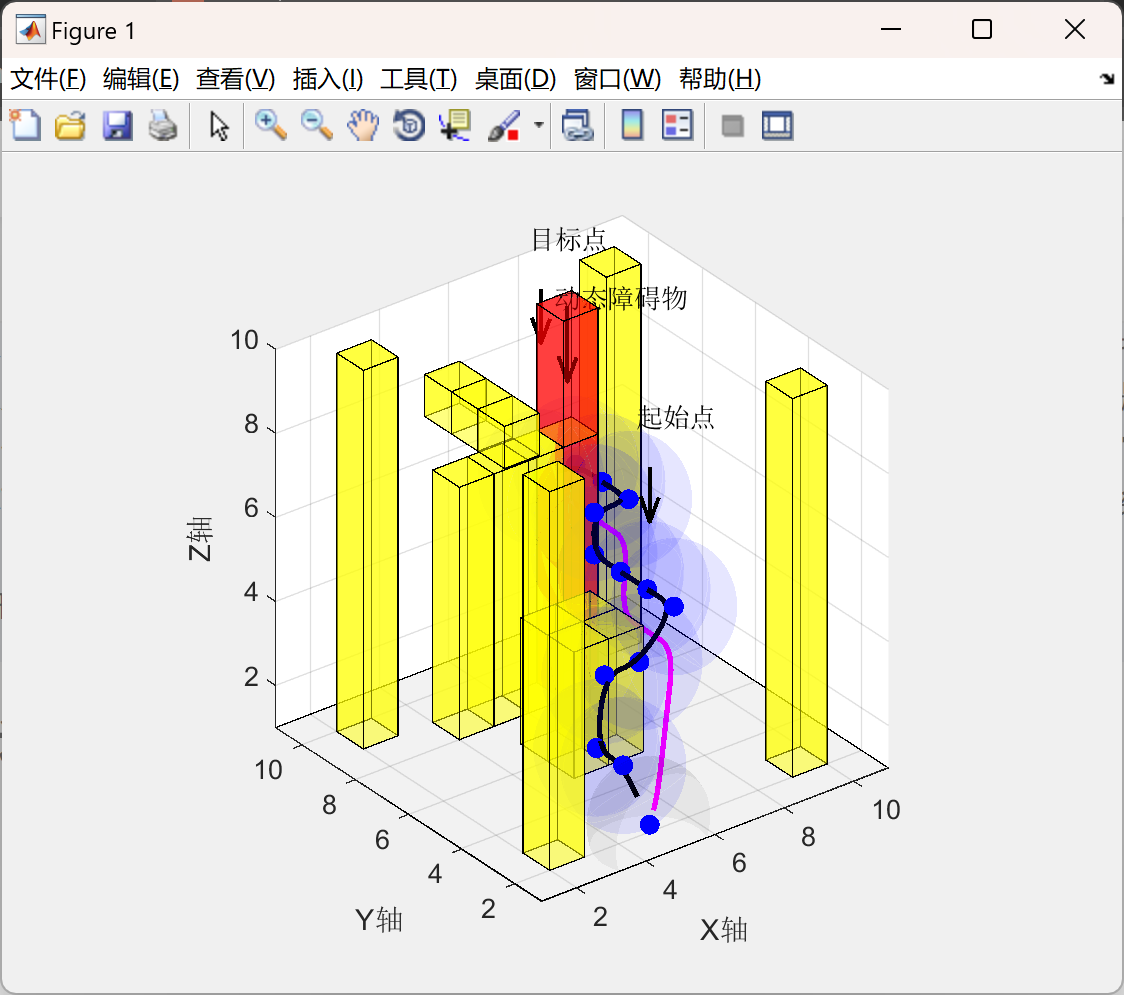
📚2 运行结果

当然自己可以手动输入地图信息。
部分代码:
%% 获得目标点
pause(1);%暂停1个单位时间
h=msgbox('请用鼠标左键选择一个目标点');%生成一个消息对话窗口,自动适应有一定大小的图像()
uiwait(h,5);%暂停执行直到用户界面反应、h被删除、或等待5个单位时间后
if ishandle(h) == 1%若h的元素为有效图表,即选择的目标点是否合法
delete(h);%完成后删除操作
end
xlabel('请用鼠标左键选择一个目标点');%x轴标显示请选择目标点,文字颜色为黑色
but=0;%but即button
while (but ~= 1) %重复直到没有按左键
[xval,yval,but]=ginput(1);%返回返回xy坐标,button为1表示鼠标左键,2表示中键滚轮,3表示鼠标右键。括号内为点的个数
end
xval=floor(xval);%取整,取小于或等于的整数
yval=floor(yval);
xTarget=xval;%坐标赋给目标点
yTarget=yval;
plot(xval+.5,yval+.5,'o','MarkerFaceColor','g','MarkerSize',7);%目标点用绿色圆点标记在单元中央
pause(0.5);
prompt={'请用键盘输入目标点的高度(整数,1-10)'};
title='输入高度';
line=1;
def={'5'};%参数defans为一个单元数组,存储每个输入数据的默认值
zval=inputdlg(prompt,title,line,def);
zval=str2double(zval);%字符串转化为数字,下一行才能执行
zTarget=zval;
MAP(xval,yval,zval)=0;%初始化地图的目标点
%% 获得障碍点
pause(0.5);
h=msgbox('请用鼠标左键选择障碍物,结束时用右键选择最后一个');
xlabel('请用鼠标左键选择障碍物,结束时用右键选择最后一个','Color','b');
uiwait(h,10);
if ishandle(h) == 1
delete(h);
end
while but == 1%输入为左键时
[xval,yval,but] = ginput(1);%返回坐标和鼠标键
xval=floor(xval);%取整
yval=floor(yval);
fill([xval,xval,xval+1,xval+1],[yval,yval+1,yval+1,yval],'y');
pause(0.5);
prompt={'请输入当前障碍物底部高度(整数,1-10)','请输入当前障碍物顶部高度(整数,1-10)'};
title='请用键盘输入高度';
line=[1 1]';
def={'1','10'};
zval=inputdlg(prompt,title,line,def);%输入界面
zval_1=str2double(zval(1));
zval_2=str2double(zval(2));
% uiwait;
for i=zval_1:zval_2
MAP(xval,yval,i)=-1;
end
end
%%%%%%%%%%%%%获得起始点%%%%%%%%%%%%%
pause(0.5);
h=msgbox('请用鼠标左键选择一个起始点');%用左键选择起始点
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]董箭,初宏晟,卢杬樟,等.基于A星算法的无人机路径规划优化模型研究[J].海洋测绘, 2021, 41(3):5.DOI:10.3969/j.issn.1671-3044.2021.03.007.
[2]花德隆.基于概率A星和智能体的无人机路径规划[D].西安电子科技大学,2013.DOI:10.7666/d.Y2379955.
[3]靳朝,林富生,宋志峰,等.基于A星算法的无人机高速公路巡检应用研究[J].江苏科技信息, 2022(006):039.














 2263
2263











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









