






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。当哲学课上老师问你什么是科学,什么是电的时候,不要觉得这些问题搞笑。哲学是科学之母,哲学就是追究终极问题,寻找那些不言自明只有小孩子会问的但是你却回答不出来的问题。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能让人胸中升起一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它居然给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
估计与数据融合
第三部分:同步定位与地图构建 (SLAM)
SLAM(Simultaneous Localization and Mapping)技术允许移动机器人在未知环境中同时定位自身并构建环境地图。这项技术是移动机器人自主导航的核心,广泛应用于各种领域,如自动驾驶、无人机导航和室内机器人服务。SLAM过程包括传感器数据的采集与处理、环境特征的提取与匹配、以及机器人位置的估计与更新。通过融合来自不同传感器的数据,SLAM系统能够在动态和复杂的环境中实现高精度和高可靠性的自主导航。
- SLAM提出了以下问题:
“是否有可能让一个自主车辆在一个未知位置的未知环境中开始,并逐步构建该环境的地图,同时利用这个地图来计算车辆的位置?”
- 解决SLAM问题的方法将使机器人能够在没有预先地图知识和独立位置信息的情况下操作。
- 解决SLAM问题将为自主车辆开辟广泛的潜在应用。
- 解决SLAM问题将使机器人真正实现自主。
- 过去十年的研究表明,解决SLAM问题确实是可能的。
全部文档:
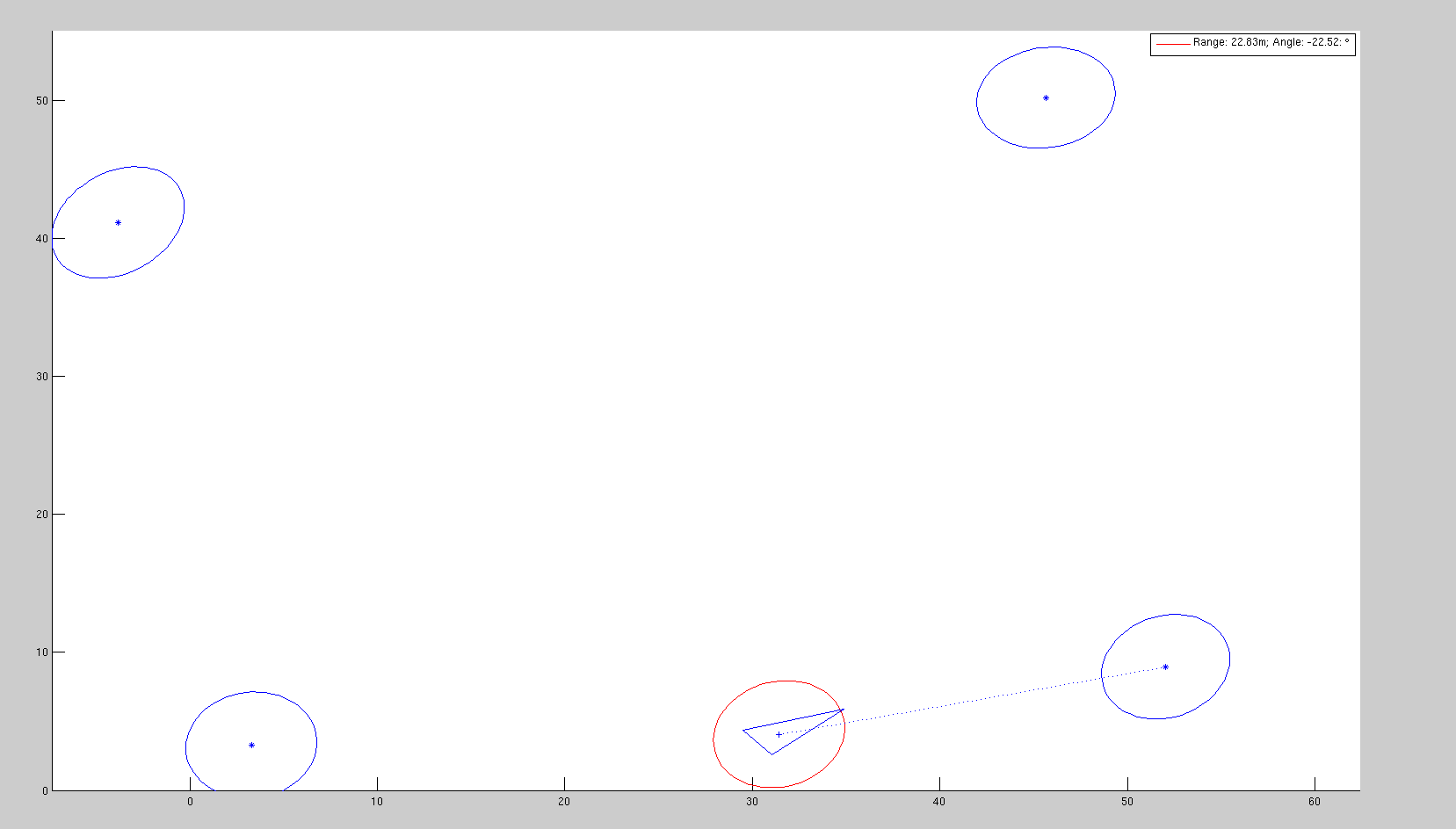
📚2 运行结果
部分代码:
% Make some spare for then
LandFeatures = zeros(2,1,nLandFeatures);
% Lets put the beacons at desired positions ( need to match the number
% defined)!!!! if nor some of then cannot be scanned!!
LandFeatures(:,:,1)=[0 10]';
LandFeatures(:,:,2)=[0 50]';
LandFeatures(:,:,3)=[50 50]';
LandFeatures(:,:,4)=[50 10]';
% Initial position of the vehicle
xVehicleTrue = [ 40 25 0]'; % start position (x, y, theta)
% Set the initial conditions of the filter
xEst =[xVehicleTrue]; % already an columm vector
PEst = diag([1 1 0.01]); % start with an medium covar ( Atention EKF need an good initialization)
% Make some space to save the Landmarks detected (arraylist (x,y)
MappedLandFeatures = NaN*zeros(nLandFeatures,2);
% Additive noise to be added at the observation
obsNoise = randn(2,1)
% Ok lets show where are our Landmarks located in the world
figure(1); hold on; grid off; axis equal;
plot(LandFeatures(1,:),LandFeatures(2,:),'b+');hold on;
set(gcf,'doublebuffer','on');
hLine = line([0,0],[0,0]);
set(hLine,'linestyle',':');
axis([ -WorldSize/2 WorldSize/2 -WorldSize/2 WorldSize/2]);
xlabel(' Initial Conditions and beacons at blue +');
display(sprintf('\n\n\n Showing initial Location \n Press any key to procced\n'));
pause;
% Standart deviation errors added to control
UTrue = diag([0.01,0.01,1.5*pi/180]).^2;
% Standard deviation errors regarding observation
RTrue = diag([1.1,5*pi/180]).^2;
% Aditive factor for control estimation and noise
UEst = 2.0*UTrue;
REst = 2.0*RTrue;
% All Setup and ready to go
% Extract first odometry for predict
CtrlNoise = randn(3,1); % some random control noise to be added ( note change to gaussian)
xOdomLast = GetOdometry(CtrlNoise);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
🌈4 Matlab代码、文档
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取
















 3819
3819

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









