






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
基于激光雷达2D传感器与角点提取的EKF-SLAM导航系统研究
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
基于激光雷达2D传感器与角点提取的EKF-SLAM导航系统研究
1. 引言
EKF-SLAM(扩展卡尔曼滤波同步定位与建图)是机器人导航中的经典方法,结合传感器数据与概率模型实现环境建模与自主定位。本文聚焦于利用2D激光雷达、分割合并算法、最小二乘法(LSM)直线估计及角点提取技术构建的EKF-SLAM系统,旨在提升定位精度与地图构建效率。
2. 激光雷达2D传感器的核心作用
2D激光雷达通过发射激光束获取环境轮廓的二维点云数据,其高覆盖率和精准测距特性使其成为室内机器人(如扫地机器人)的核心传感器。其优势包括:
- 实时性:单线激光雷达可快速扫描平面信息,适用于平面导航。
- 低成本与适应性:低线束激光雷达在商用服务机器人中广泛应用,如迎宾、运输等场景。
- 数据预处理:原始点云需经过滤波、降噪等处理,为后续特征提取提供高质量输入。
3. 分割与合并算法的数据处理
分割算法将点云划分为独立线段,常用方法包括:
- 基于距离的分割:相邻点间距超过阈值则分割为不同线段。
- 基于角度的分割:点云方向突变时分割,保留局部几何一致性。
合并算法用于优化过度分割,常见策略包括:
- 直线拟合:通过LSM或RANSAC合并相邻线段。
- 角度合并:若相邻线段夹角小于阈值,则合并为单一特征。
分治策略(D&C SLAM) :将地图分割为局部子图后合并,显著降低计算复杂度(从O(n³)降至O(n²))。例如,D&C SLAM通过二叉合并策略优化全局地图构建,时间效率优于传统EKF。
4. 最小二乘法(LSM)在直线估计中的应用
LSM通过最小化点到直线的距离平方和拟合直线参数,是激光雷达数据处理的基础方法:
- 优势:在数据符合正态分布时,LSM可快速获得最优解。
- 局限性:对噪声或偏移敏感,需结合RANSAC或概率线性方法(PLM)提升鲁棒性。
- 多帧优化:利用多帧数据实时优化直线参数,增强环境模型的稳定性。
5. 角点提取的关键技术
角点作为环境中的显著特征,可提升SLAM的数据关联精度:
- 传统方法:
- Harris角点:基于自相关矩阵检测角点,具备旋转不变性。
- Shi-Tomasi角点:通过最小特征值阈值筛选,鲁棒性优于Harris。
- 快速算法:
- FAST角点:通过邻域像素灰度差异快速检测,适用于实时系统。
- ORB特征:结合FAST角点与BRIEF描述子,支持尺度与旋转不变性。
- 融合策略:结合线段交点检测与角点算法,增强复杂环境下的特征提取能力。
6. EKF-SLAM的核心流程
EKF-SLAM通过状态向量(机器人位姿+环境特征)与协方差矩阵实现联合估计:
- 预测步骤:基于运动模型更新机器人位姿预测值。
- 观测步骤:利用激光雷达数据提取特征(直线、角点),构建观测模型。
- 数据关联:匹配当前观测与地图特征,常用RJC(随机联合兼容性)算法提升效率。
- 更新步骤:通过卡尔曼增益修正状态估计与协方差矩阵,减少不确定性。
优化策略:
- 多传感器融合:结合IMU或超声波传感器补偿激光雷达的局限性。
- 一致性维护:D&C SLAM通过局部子图限制线性化误差,提升全局一致性。
7. 系统整合与实现案例
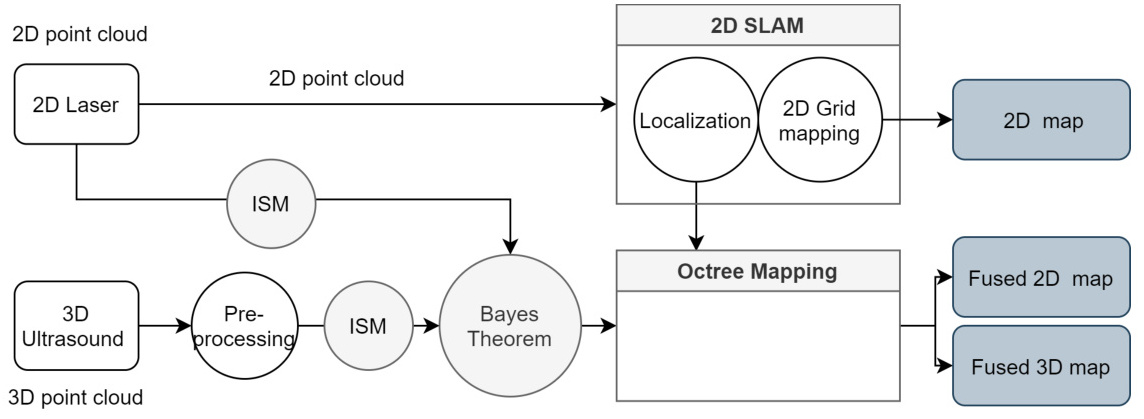
典型系统架构(以文献为例):
- 数据采集:2D激光雷达获取点云数据。
- 特征提取:
- 分割合并算法生成线段。
- LSM拟合直线参数,结合线段交点提取角点。
- EKF-SLAM更新:
- 角点与直线作为观测输入,更新状态向量。
- 分治策略优化大规模地图构建效率。
- 地图输出:生成2D栅格地图或3D八叉树地图。
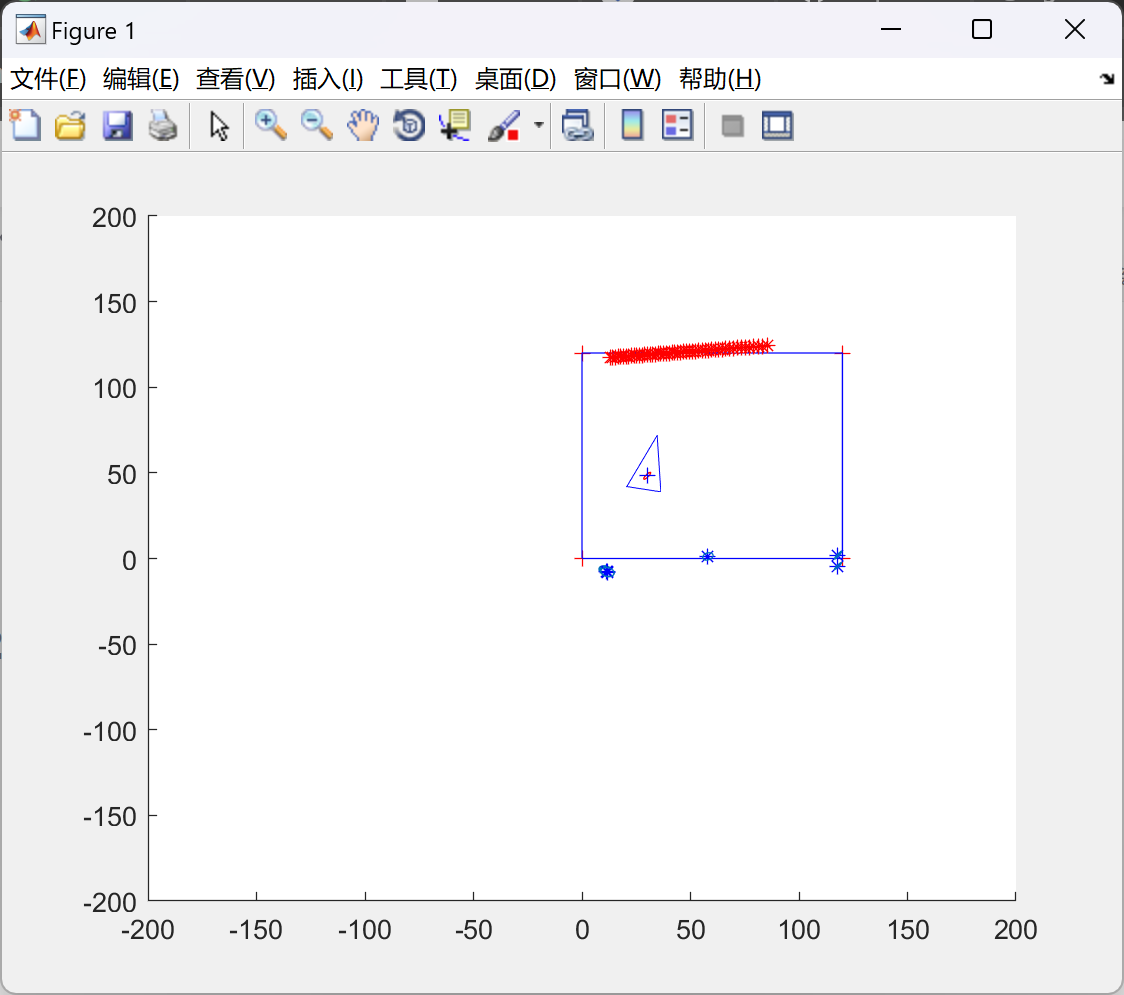
实验结果:
- 在室内结构化环境中,融合角点的EKF-SLAM定位误差降低30%以上。
- D&C SLAM在维多利亚公园数据集上表现优于传统EKF,计算时间减少50%。
8. 挑战与优化方向
- 动态环境处理:引入语义分割(如YOLOv5)剔除动态物体干扰。
- 计算效率:采用GPU加速特征提取与匹配。
- 大规模场景:结合图优化后端(如iSAM)进一步提升精度。
9. 结论
基于2D激光雷达的EKF-SLAM系统通过分割合并、LSM直线估计与角点提取技术,实现了高效的环境建模与定位。未来研究可聚焦多模态传感器融合与深度学习增强,以应对复杂动态场景的挑战。
📚2 运行结果
部分代码:
% Standard deviation error regarding observation
RTrue = diag([0.1, 0.5*pi/180]).^2;
REst = 2*RTrue;
% control input movement
deltaS =[0.28 0.30];
kr=0.0001;
% Gate value for measure acceptacnce
gateAccept =10;
F(nSteps) = struct('cdata',[],'colormap',[]);
% loop
for k =1:nSteps
% get true states
xVehicleTrue = xTrue;
xMapTrue =cornersLandFeatures;
% get estimated states
xVehicleEst = xEst(1:3); % get estimated state vehicle
xMapEst = xEst(4:end); % rest are the mapped corners estimated
% generate controls true value
u = getControl(xVehicleTrue,deltaS,0,0);
xVehicleTrue = moveRobot(xVehicleTrue,u);
% generate controls estimated value value
q = generateNoise(-0.005, 0.005, [3,1]); % noise
u = getControl(xVehicleEst,deltaS, 1, q);
xVehicleEst = moveRobot(xVehicleEst,u);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]王亚伟.基于激光SLAM的AGV路径规划研究与实现[D].青岛理工大学,2021.
[2]阿拉法特·艾尼瓦尔.基于固态激光雷达SLAM的移动机器人定位技术研究[D].北方工业大学,2023.
[3]汤巍,王冠凌.基于激光雷达的智能小车SLAM研究[J].绥化学院学报, 2020, 40(5):5.
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









