






 本文详细介绍了CCPP算法,一种用于扫地机器人路径规划的关键技术,涉及问题本质、关键问题、技术指标以及多种路径规划方法。算法强调了区域覆盖率、路径重复率和总行程的优化,并讨论了路径表达、平滑性及在ROS和OpenCV环境下的实现流程。
本文详细介绍了CCPP算法,一种用于扫地机器人路径规划的关键技术,涉及问题本质、关键问题、技术指标以及多种路径规划方法。算法强调了区域覆盖率、路径重复率和总行程的优化,并讨论了路径表达、平滑性及在ROS和OpenCV环境下的实现流程。
1.CCPP整体算法文档
1.1 ccpp基础介绍
全路径覆盖算法(CCPP: Complete Coverage Path Planning)作为扫地机器人较为关键的组成部分,其问题的本质是:在栅格地图中,全覆盖路径规划问题就演变为寻找机器人的下一个移动位置,只有准确找出了该位置,才能使机器人自主规划出一条切实可行的无碰撞且重复率低的移动路径。
CCPP需解决的关键问题:
- 遍历工作区域内除障碍物以外的全部区域
- 在遍历过程中有效避开所有障碍物
- 在遍历过程中要尽量避免路径重复,缩短移动距离
CCPP技术指标:
- 区域覆盖率
- 路径重复率
- 总行程
路径规划方法分类(根据实现方法)
- 传统经典算法
- 基于图的方法
- 基于栅格的方法
- 势场法
- 数学编程法
- 智能方法
- 横糊方法
- 神经网络方法
- 遗传算法
路径搜索要求
- 路径表达:以环境模型中的结点序列组成或由直线段序列组成
- 路径平滑:根据机器人运动学或动力学约束,形成机器人可跟踪执行的运动轨迹
- 运动学约束:路径轨迹的一阶导数应连续
- 动力学约束:路径轨迹的二阶导数应连续
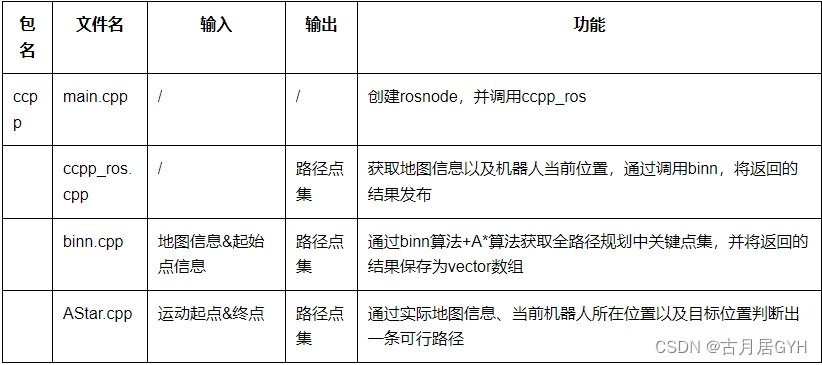
1.2 ccpp输入输出
ccpp
1.3 ccpp所用代码库
目前ccpp环境搭建是基于ros环境的,同时基于Opencv去进行分析

1.3ccpp处理流程
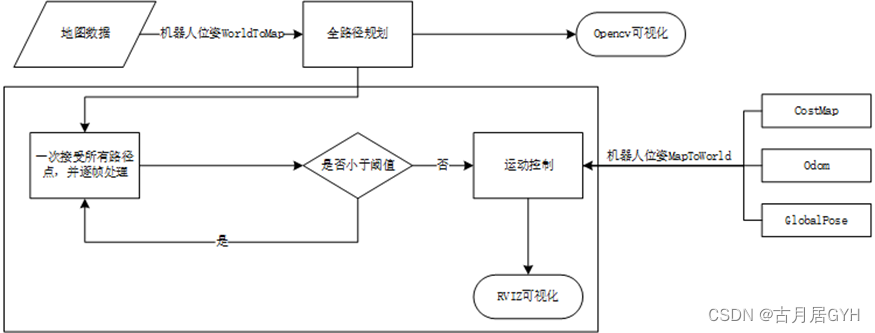
点击基于BINN算法的CCPP全路径覆盖算法 - 古月居 可查看全文















 1875
1875

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









