






文章目录
前言
当前智能汽车上一般配置有12路超声波雷达,这些专用超声波雷达内置了MCU,直接输出数字化的测距结果,一般硬件接口采用串口RS485,通信协议采用modbus。请思考:
1)RS485与RS232(UART)有什么不同?
2)Modbus协议是什么?
3)如果让你设计一款 12路车载超声波雷达,采用 stm32F103+HC-SR04超声波模块,对外提供RS485和Modbus协议,你的设计方案是什么?
一、UART和RS232、RS485的关系
通讯问题,和交通是一样的。串口通信,我们这里可以用公交来类比。

公交运行可以简单分成两个部分:
1、车站
2、公路
其中车站决定了车上装什么(人),怎么发送(班次)等。
当汽车跑在路上,就要遵守公路交通的规则,过桥有过桥的规则,高速有高速的规则,和车站没有关系了。
回到串口通讯,其实,UART就相当于车站,而RS232/RS485则对应于公路的规则。
1.1 UART
UART,是通用异步收发传输器(Universal Asynchronous Receiver/Transmitter),既然是“器”,显然,它就是个设备而已,要完成一个特定的功能的硬件,它本身并不是协议。那么它要完成什么功能呢?它的最基本功能,是串行数据和并行数据之间的转换。我们知道,计算机中的数据以Byte为基本单位,对一个Byte的存取是并行的,即,同时取得/写入8个bit。而串行通信,需要把这个Byte“打碎”,按照时间顺序来收发以实现串行。例如:
内存中的数据是: 1 1 1 0 0 1 0 1
串行发送的实际效果是(按时间排序【注1】):
1
0
1
0
0
1
1
1
接收则是上述过程的逆过程。
这就是UART做的最基本工作,进一步的,它还要控制“发车的班次”,比如确认一个Byte的这8个bit是什么时候开始的,又是什么时候结束的,两个班次之间至少要隔多长时间的缓冲,等等。这一部分,也具有协议的特征,但是相对于道路上的协议,更具有一般性,或曰,是与车在什么道路上开,相对独立的。
那么道路上的规定是什么样的呢?
1.2 RS232/RS485
RS232/RS485,是两种不同的电气协议,也就是说,是对电气特性以及物理特性的规定,作用于数据的传输通路上,它并不内含对数据的处理方式。比如,最显著的特征是:RS232使用3-15v有效电平,而UART,因为对电气特性并没有规定,所以直接使用CPU使用的电平,就是所谓的TTL电平(可能在0~3.3V之间)。
更具体的,电气的特性也决定了线路的连接方式,比如RS232,规定用电平表示数据,因此线路就是单线路的,用两根线才能达到全双工的目的;而RS485, 使用差分电平表示数据,因此,必须用两根线才能达到传输数据的基本要求,要实现全双工,必需用4根线。
但是,无论使用RS232还是RS485,它们与UART是相对独立的,但是由于电气特性的差别,必须要有专用的器件和UART接驳,才能完成数据在线路和UART之间的正常流动。
RS232甚至规定了接口的具体样式,例如为DB9接口
总结: 从某种意义上,可以说,线路上存在的仅仅是电流,RS232/RS485规定了这些电流在什么样的线路上流动和流动的样式;在UART那里,电流才被解释和组装成数据,并变成CPU可直接读写的形式。
注1】这里是例子是小端发送模式,是基本的串口传输方式,但是,大端模式的串口传输模式也是存在的,少见而已。
UART可以这样理解:每个
SOC芯片,内部都会有UART控制器,也就是上面的“车站”。但是通常说的UART指的是,一种串行通信协议。规定了数据帧格式,波特率等。
RS232和RS485:是规定了数据通信的电气特性。是物理层的概念,对应的物理期间有RS232或者RS485驱动芯片,将CPU经过UART传送过来的电压信号驱动成RS232或者RS485电平逻辑。
异步串口是目前工业设备最主要的通讯接口之一。在具体的工业现场中,串口的电气接口以RS232和RS485最为普遍。串口大多以TTL信号形式从板卡的管脚输入输出,客户需要在自己的应用底板上加入相应的驱动电路单元,以获得所需的串口接口,如RS232或RS485。在实际的应用中,由于现场的设备串口接口的情况并不确定,这样就要求客户设备同时具备RS232和RS485两种接口的功能。
RS232接口是采用正负电平的单极性信号,一般以3线制的接口最为普遍,信号包括RS232_TX、RS232_RX及GND,具有全双工通讯能力。RS485接口采用一对TTL电平的差分信号RS485_D-和RS485_D+,只能半双工通讯,在通讯方向(接收或发送)的切换方面,一般有两种方式:一种方式是利用TTL_TXD经过一定处理作为方向控制,这种方式也称为自动方向切换方式;另一种方式是使用串口的RTS控制线来控制方向,RTS有效时处于发送状态,无效时处于接收状态。
RS485接口连接器采用DB-9的9芯插头座,与智能终端RS485接口采用DB-9(孔),与键盘连接的键盘接口RS485采用DB-9(针)。
RS232和RS485定义是电气特性,影响的是数据在线路上的传输过程,RS232和RS485的收发器通过UART才能被CPU访问,所以,只要控制了UART,就可以控制串口的传输方式,而所谓的编程其实就是对UART编程,所以RS232个RS485从程序员视角是不可见的。 “那你就直接说RS485和RS232编程上没有区别不就完了?”
问题是,实际总比理论复杂,这里有一种
例外:
RS232用两根线实现全双工,两根线各做各的,互不影响,可以同时进行;
RS485虽然可以用四根线实现全双工,但是实际应用中比较少见,更常见的是只用两根线实现半双工,这样一来,就涉及到“收状态”和“发状态”的切换,这一切换又涉及两种情况:1、驱动程序中已经含有对半双工情况下的接受切换,驱动程序会根据你读或写的动作,自动进行切换。这种情况下,RS485的编程就与RS232完全没有区别。
2、驱动程序不带自动切换,此时,为了完成切换,必须使用额外的GPIO连接RS485收发模块的接受使能端,在接受、发送数据之前,首先对使能端置位,使之处于正确的“接收”或“发送”状态。
"RS-485"是否与"半双工"等同?
答:否,RS-485接口可连接成半双工和全双工两种通信方式,半双工通信芯片有SN75176,SN751276,SN75LBC184,MAX485,MAX1478,MAX3082,MAX1483,全双工通信的有:SN75179,SN75180,MAX488-491,MAX1482 等
1.3 RS232 与 RS485 的区别:
(1)抗干扰性:
- RS485 接口是采用平衡驱动器和差分接收器的组合,抗噪声干扰性好。
- RS232 接口使用一根信号线和一根信号返回线而构成共地的传输形式,这种共地传输容 易产生共模干扰,所以抗噪声干扰性弱。
(2)传输距离:
- RS485 接口的最大传输距离标准值为 1200 米(9600bps 时),实际上可达 3000 米。
- RS232 传输距离有限,最大传输距离标准值为 50 米,实际上也只能用在 15 米左右。
(3)通信能力:
- RS-485 接口在总线上是允许连接多达 128 个收发器, 即具有多站能力,这样用户可以利用 单一的 RS-485 接口方便地建立起设备网络 。
- RS-232 只允许一对一通信。
(4)传输速率:
- 传输速率较低,在异步传输时,波特率为 20Kbps。
- RS-485 的数据最高传输速率为 10Mbps 。
(5)信号线:
- RS485 接口组成的半双工网络,一般只需二根信号线。
- RS-232 口一般只使用 RXD、TXD、GND 三条线,即"发送数据"、“接收数据"和"信号地” 。
(6)电气电平值:
- 逻辑"1"以两线间的电压差为+(2-6) V 表示;逻辑"0"以两线间的电压差为-(2-6)V 表 示 。
- 在 RS-232-C 中任何一条信号线的电压均为负逻辑关系。即:逻辑"1",-5- -15V;逻辑"0 " +5- +15V 。噪声容限为 2V。即要求接收器能识别低至+3V 的信号作为逻辑"0",高到-3 V 的信号作为逻辑"1" 。
- RS232 接口的信号电平值较高, 易损坏接口电路的芯片, 又因为与 TTL 电平不兼容故需使 用电平转换电路方能与 TTL 电路连接。
- RS485 接口信号电平比 RS-232-C 降低了,就不易损坏接口电路的芯片, 且该电平与 TTL 电平兼容,可方便与 TTL 电路连接。
1.4 RS232 与 RS485 的联系:
- 都可通过 DB-9 连接器连接.
- 接口均可采用屏蔽双绞线传输。
- 都是串行通信。
- 通信方式都是全双工。 (一般情况 485 是半双工)
由于有的设备是232接口的,有的是485接口的,如果有一台232接口的设备与一台485接口的设备通信,那就需要一个RS232/RS485转换器,把232接口的设备的232信号转换成485信号,然后再与485接口的设备通信。如果是两台232接口的设备要进行远距离的通信,那只要加上两个RS232/RS485转换电路就可以了。
市场上所谓的“无源RS232/RS485转换器”采用从计算机串口偷电技术,而“有源RS232/RS485转换器”在电路原理图与跟前者差不多,只是电源部分有所改动而已。
二、Modbus协议说明
2.1 什么是协议
在了解什么是Modbus之前,我们先来看下什么是 协议
协议是一个汉语词汇,读音为xié yì,意思是共同计议,协商;经过谈判、协商而制定的共同承认、共同遵守的文件。
简单地说,在我们的单片机之间互相通信,以及单片机和上位机通信中,规定了不同的内容规范,这个规范是通信的双方都需要遵守的,这样就可以实现两者的通信。
而这个协议规范可以有很多种,来适应不同的设备以及通信要求等,我们常见的就有IIC SPI UART串口通信协议等等。而Modbus也是一个串行通信协议。

2.2 Modbus协议说明
Modbus诞生于1979年 莫迪康公司 后来被施耐德电气公司收购。Modbus提供通用语言用于彼此通信的设备和设备。
Modbus已经成为工业领域通信协议的业界标准,并且现在是工业电子设备之间常用的连接方式。Modbus作为目前工业领域应用最广泛的协议
最简单的说,Modbus就是一个总线通信协议,像IIC SPI这种,但是他 不依赖于硬件总线
Modbus之所以使用广泛,是有他的优点的
- Modbus协议标准开放、公开发表且无版权要求
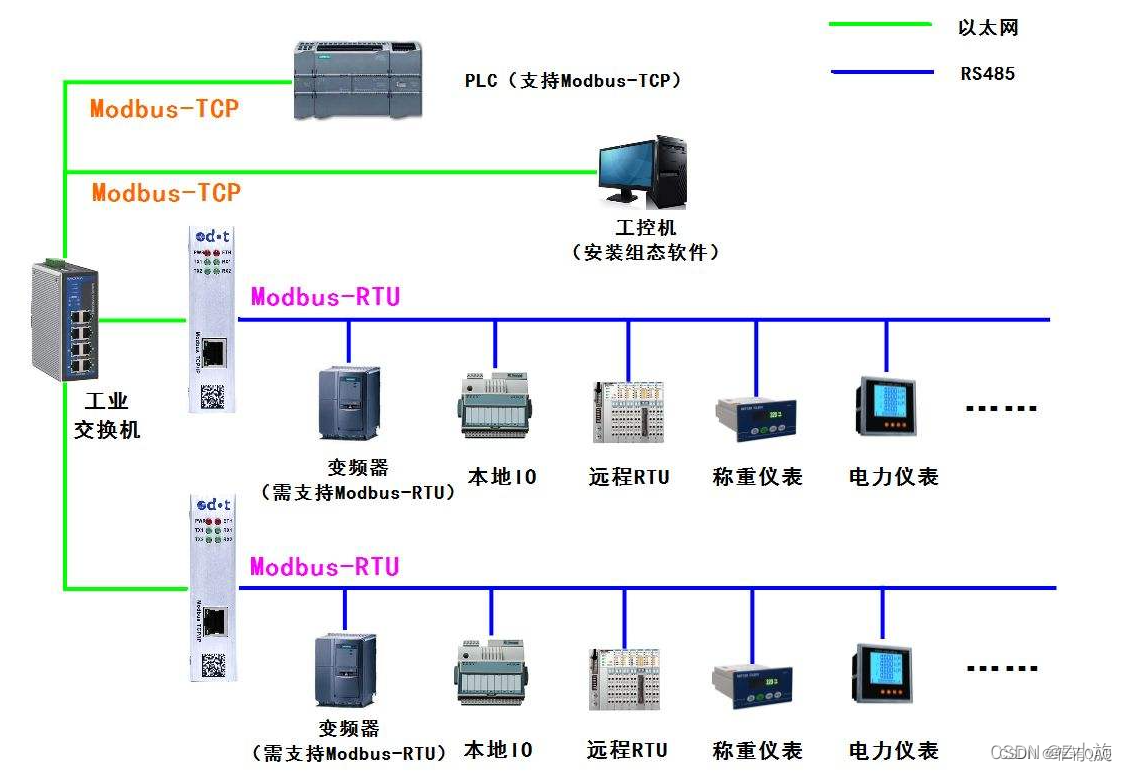
- Modbus协议支持多种电气接口,包括RS232、RS485、TCP/IP等,还可以在各种介质上传输,如双绞线、光纤、红外、无线等
- Modbus协议消息帧格式简单、紧凑、通俗易懂。用户理解和使用简单,厂商容易开发和集成,方便形成工业控制网络
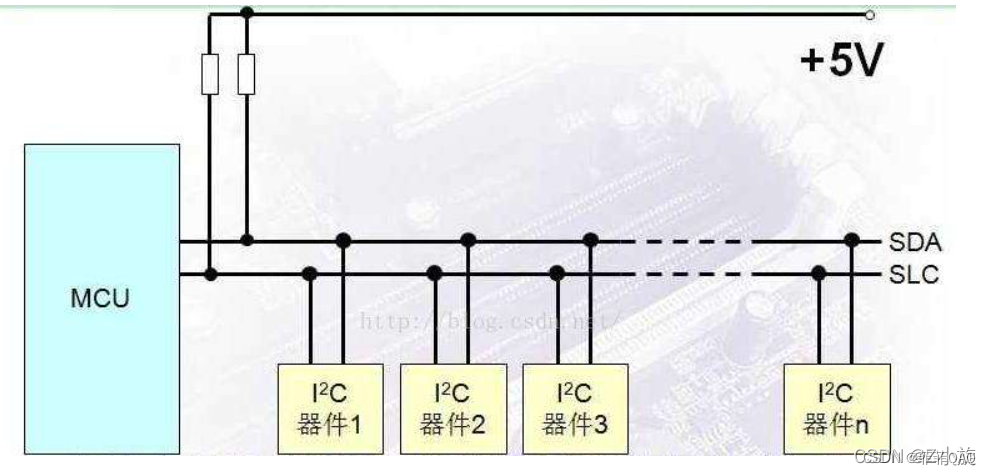
举一个简单的例子,我们常用的IIC通信协议,需要在物理上连接iic总线,然后加上拉电阻,规定好物理层的高低电平。
而 Modbus协议是一种应用层报文传输协议,协议本身并没有定义物理层,定义了控制器能够认识和使用的消息结构,不管它们是经过何种网络进行通信的。 所以能够适应多种电气接口,因此使用非常广泛。
2.3 Modebus通信过程
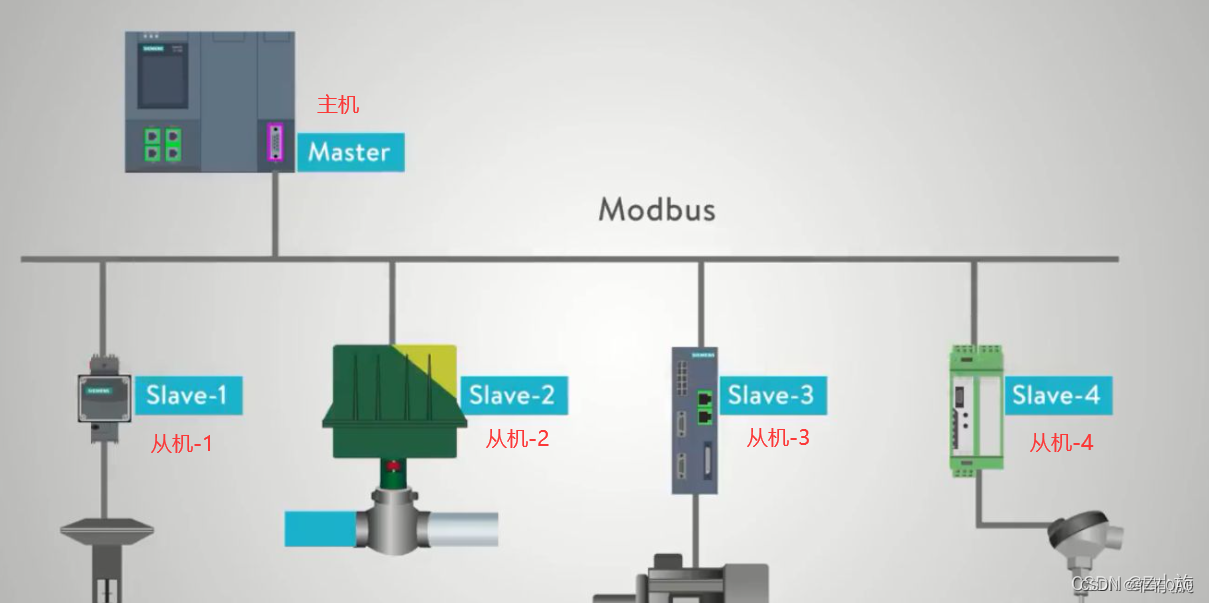
注意Modbus是一主多从的通信协议
Modbus通信中只有一个设备可以发送请求。其他从设备接收主机发送的数据来进行响应,从机是任何外围设备,如I/O传感器,阀门,网络驱动器,或其他测量类型的设备。从站处理信息和使用Modbus将其数据发送给主站。
也就是说,不能Modbus同步进行通信,主机在同一时间内只能向一个从机发送请求,总线上每次只有一个数据进行传输,即主机发送,从机应答,主机不发送,总线上就没有数据通信。
从机不会自己发送消息给主站,只能回复从主机发送的消息请求。
并且,Modbus并没有忙机制判断,比方说主机给从机发送命令, 从机没有收到或者正在处理其他东西,这时候就不能响应主机,因为modbus的总线只是传输数据,没有其他仲裁机制,所以需要通过软件的方式来判断是否正常接收。
举例
现在,我们来探讨Modbus数据传输的方式,可以简单地理解成打电话。并且是单向通信的打电话
主机发送数据,首先需要从机的电话号码(区分每个从机,每个地址必须唯一),告诉从机打电话要干什么事情,然后是需要发送的内容,最后再问问从机,我说的话你都听清楚了没有呀,没有听错吧?
然后从机这里,得到了主机打过来的电话,从机回复主机需要的内容,主机得到从机数据,这样就是一个主机到从机的通信过程
就好比老师和你打电话,老师拨通了你的电话号,然后老师跟你说,小王呀,我这里需要你给我发东西,发的内容是上周的一周总结,你说好的,然后打开你电脑的文件夹,把你的周报发给老师,这就是一个通信过程。
2.4 Modbus存储区
既然从机存储数据,那么肯定要有一个存储区,那就需要文件操作,我们都知道这文件可以分为只读(-r)和读写(-wr)两种类型
并且存储的数据类型可以分为 :布尔量 和 16位寄存器
- 布尔量比如IO口的电平高低,灯的开关状态等。
- 16位寄存器比如 传感器的温度数据,存储的密码等。
Modbus协议规定了4个存储区 分别是0 1 3 4区 其中1区和4区是可读可写,1区和3区是只读。
Modbus协议规定了4个存储区 分别是0 1 3 4区 其中1区和4区是可读可写,1区和3区是只读。
| 区号 | 名称 | 读写 | 地址范围 |
|---|---|---|---|
| 0区 | 输出线圈 | 可读可写布尔量 | 00001-09999 |
| 1区 | 输入线圈 | 只读布尔量 | 10001-19999 |
| 3区 | 输入寄存器 | 只读寄存器 | 30001-39999 |
| 4区 | 保持寄存器 | 可读可写寄存器 | 40001-49999 |
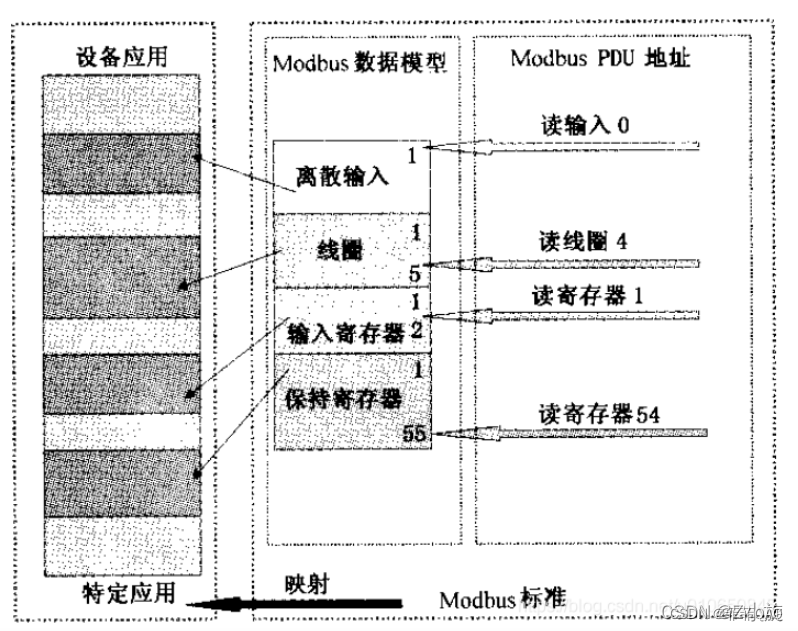
并且Modbus还给每个区都划分了地址范围 主机向从机获取数据时,只需要告诉从机数据的起始地址,还有获取多少字节的数据,从机就可以发送数据给主机
Modbus数据模型规定了具体的地址范围,每一个从机,都有实际的物理存储,跟modbus的存储区相对应,主机读写从机的存储区,实际上就是对从机设备对应的实际存储空间进行读写。
2.5 Modbus协议类型
在上面我们已经说明了Modbus可以在各种介质上传输,那么他的传输模式也分为三种。包括ASCII、RTU(远程终端控制系统)、TCP三种报文类型
串行端口存在多个版本的Modbus协议,而最常见的是下面四种:
- Modbus-Rtu
- Modbus-Ascii
- Modbus-Tcp
- ModbusPlus
Modbus RTU是一种紧凑的,十六进制表示数据的方式,Modbus ASCII是一种采用Ascii码表示数据,并且每个8Bit 字节都作为两个ASCII字符发送的表示方式。
RTU格式后续的命令/数据带有循环冗余校验的校验和,而ASCII格式采用纵向冗余校验的校验和。
Modbus协议使用串口传输时可以选择RTU或ASCII模式,并规定了消息、数据结构、命令和应答方式并需要对数据进行校验。ASCII 模式采用LRC校验,RTU模式采用16 位CRC校验。通过以太网传输时使用TCP,这种模式不使用校验,因为TCP协议是一个面向连接的可靠协议。
当然常用的就是RTU模式,ASCII一般很少
举一个简单的例子,如果我们需要发送一个数字10那么RTU模式下,只需要发送 0x0A 总线上传输数据形式为: 0000 1010
而ASCII码模式则将数据1和0转为’1’和’0’,需要发送0x31(1) 0x30(0)两个字节数据。总线上传输数据形式为: 0011 0001 0011 0000
Modbus RTU是一种紧凑的,十六进制表示数据的方式,Modbus ASCII是一种采用Ascii码表示数据,并且每个8Bit 字节都作为两个ASCII字符发送的表示方式。
RTU格式后续的命令/数据带有循环冗余校验的校验和,而ASCII格式采用纵向冗余校验的校验和。
Modbus协议使用串口传输时可以选择RTU或ASCII模式,并规定了消息、数据结构、命令和应答方式并需要对数据进行校验。ASCII 模式采用LRC校验,RTU模式采用16 位CRC校验。通过以太网传输时使用TCP,这种模式不使用校验,因为TCP协议是一个面向连接的可靠协议。

当然常用的就是RTU模式,ASCII一般很少
举一个简单的例子,如果我们需要发送一个数字10 那么RTU模式下,只需要发送 0x0A 总线上传输数据形式为: 0000 1010
而ASCII码模式则将数据1和0转为’1’和’0’,需要发送0x31(1) 0x30(0)两个字节数据。总线上传输数据形式为: 0011 0001 0011 0000
详细的我们等下再阐述
2.5.1 Modbus-RTU协议
2.5.2 Modbus报文帧结构
一个报文就是一帧数据,一个数据帧就一个报文: 指的是一串完整的指令数据,本质就是一串数据。
Modbus报文是指主机发送给从机的一帧数据,其中包含着从机的地址,主机想执行的操作,校验码等内容
Modbus协议在串行链路上的报文格式如下所示:

| 从站地址 | 功能码 | 数据 | CRC/LRC |
|---|---|---|---|
| 1 byte | 1 byte | N bytes | 2 bytes |
- 帧结构 = 从机地址 + 功能吗 + 数据 + 校验
-
从机地址: 每个从机都有唯一地址,占用一个字节,范围0-255,其中有效范围是1-247,其中255是广播地址(广播就是对所有从机发送应答)
-
功能码: 占用一个字节,功能码的意义就是,知道这个指令是干啥的,比如你可以查询从机的数据,也可以修改从机的数据,所以不同功能码对应不同功能.
-
数据: 根据功能码不同,有不同功能,比方说功能码是查询从机的数据,这里就是查询数据的地址和查询字节数等。
-
校验: 在数据传输过程中可能数据会发生错误,CRC检验检测接收的数据是否正确
Modbus功能码
Modbus规定了多个功能,那么为了方便的使用这些功能,我们给每个功能都设定一个功能码,也就是指代码。
Modbus协议同时规定了二十几种功能码,但是常用的只有8种,用于对存储区的读写,如下表所示:
| 功能码 | 功能说明 |
|---|---|
| 01H | 读取输出线圈 |
| 02H | 读取输入线圈 |
| 03H | 读取保持寄存器 |
| 04H | 读取输入寄存器 |
| 05H | 写入单线圈 |
| 06H | 写入单寄存器 |
| 0FH | 写入多线圈 |
| 10H | 写入多寄存器 |
当然我们用的最多的就是03和06 一个是读取数据,一个是修改数据。
CRC校验
错误校验(CRC)域占用两个字节包含了一个16位的二进制值。CRC值由传输设备计算出来,然后附加到数据帧上,接收设备在接收数据时重新计算CRC值,然后与接收到的CRC域中的值进行比较,如果这两个值不相等,就发生了错误。
比如主机发出01 06 00 01 00 17 98 04, 98 04 两个字节是校验位,那么从机接收到后要根据01 06 00 01 00 17 再计算CRC校验值,从机判断自己计算出来的CRC校验是否与接收的CRC校验(98 04主机计算的)相等,如果不相等那么说明数据传输有错误,这些数据就不能要。
CRC校验流程:
1、预置一个16位寄存器为0FFFFH(全1),称之为CRC寄存器。
2 、把数据帧中的第一个字节的8位与CRC寄存器中的低字节进行异或运算,结果存回CRC寄存器。
3、将CRC寄存器向右移一位,最高位填以0,最低位移出并检测。
4 、如果最低位为0:重复第三步(下一次移位);如果最低位为1:将CRC寄存器与一个预设的固定值(0A001H)进行异或运算。
5、重复第三步和第四步直到8次移位。这样处理完了一个完整的八位。
6 、重复第2步到第5步来处理下一个八位,直到所有的字节处理结束。
7、最终CRC寄存器的值就是CRC的值。
此外还有一种利用预设的表格计算CRC的方法,它的主要特点是计算速度快,但是表格需要较大的存储空间,该方法此处不在阐述

下面我们来看详细的发送和接收数据:
1、主机对从机读数据操作
主机发送报文格式如下:
| 从站地址 | 功能码 | 起始(高) | 起始(低) | 数量(高) | 数量(低) | 校验 |
|---|---|---|---|---|---|---|
| 0x01 | 0x03 | 0x00 | 0x01 | 0x00 | 0x01 | 0xD5 0xCA |
含义:
0x01:从机的地址
0x03:查询功能,读取从机寄存器的数据
0x00 0x01: 代表读取的起始寄存器地址.说明从0x0001开始读取.
0x00 0x01: 查询的寄存器数量为0x0001个 Modbus把数据存放在寄存器中,通过查询寄存器来得到不同变量的值,一个寄存器地址对应2字节数据; 寄存器地址对应着从机实际的存储地址
0xD5 0xCA: 循环冗余校验 CRC
从机回复报文格式如下:
| 从站地址 | 功能码 | 字节计数 | 字节1 |字节2 | 校验 |
|–|–|-|-|-|-|-|
| 0x01 | 0x03| 0x02| 0x01 | 0x00| 0x17| 0xF8 0x4A |
含义:
0x01:从机的地址
0x03:查询功能,读取从机寄存器的数据
0x02: 返回字节数为2个 一个寄存器2个字节
0x00 0x17:寄存器的值是0017
0xF8 0x4A: 循环冗余校验 CRC
2、主机对从机写数据操作
主机发送报文格式如下:
| 从站地址 | 功能码 | 数据地址(高) | 数据地址(低) | 数据(高) | 数据(低) | 校验 |
|---|---|---|---|---|---|---|
| 0x01 | 0x06 | 0x00 | 0x01 | 0x00 | 0x17 | 0x98 0x04 |
含义:
0x01:从机的地址
0x06:修改功能,修改从机寄存器的数据
0x00 0x01: 代表修改的起始寄存器地址.说明修改0x0000-0x0001的存储内容
0x00 0x17: 要修改的数据值为0017
0x98 0x04: 循环冗余校验 CRC
从机回复报文格式如下:
| 从站地址 | 功能码 | 数据地址(高) | 数据地址(低) | 数据(高) | 数据(低) | 校验 |
|---|---|---|---|---|---|---|
| 0x01 | 0x06 | 0x00 | 0x01 | 0x00 | 0x17 | 0x98 0x04 |
含义:
0x01:从机的地址
0x06:修改功能,修改从机寄存器的数据
0x00 0x01: 代表修改的起始寄存器地址.说明是0x0000
0x00 0x17:修改的值为0017
0x98 0x04: 循环冗余校验 CRC
从机的回复和主机的发送是一样的,如果不一样说明出现了错误
2.5.3 Modbus-ACSII协议
在消息中的每个字节都作为两个ASCII字符发送
十六进制的0-F 分别对应ASCII字符的0…9,A…F
也就是0x30~0x3A 0x41~0x46

下方是ascii的报文帧
-
1个字节起始位
-
2个字节地址位
-
2个字节功能位
-
n个数据位,最小的有效位先发送
-
LRC(纵向冗长检测) 注意校验方式不同
-
结束符 \r \n

可以看到数据部分更加繁琐,正常我们使用都是用RTU格式,ASCII码格式有了解即可。

总结:
ModbusASCII有开始字符(和结束字符(CR LF),可以作为一帧数据开始和结束的标志,而ModbusRTU没有这样的标志,需要用时间间隔来判断一帧报文的开始和结束,协议规定的时间为3.5个字符周期,就是说一帧报文开始前,必须有大于3.5个字符周期的空闲时间,一帧报文结束后,也必须要有3.5个字符周期的空闲时间否则就会出现粘包的情况。
注意:针对3.5个字符周期,其实是一个具体时间,但是这个时间跟波特率相关。
在串口通信中,1个字符包括1位起始位、8位数据位(一般情况)、1位校验位(或者没有)、1位停止位(一般情况下),因此1个字符包括11个位,那么3.5个字符就是38.5个位,波特率表示的含义是每秒传输的二进制位的个位,因此如果是9600波特率,3.5个字符周期=/960038.5=0.00401s1000=4.01ms
2.5.4 Modbus-TCP协议
我们首先看下Modbus-TCP和Modbus-ACSII的区别
Modbus-TCP并不需要从从机地址,而是需要MBAP报文头
并且不需要差错校验,因为TCP本身就具有校验差错的能力

MBAP报文头格式如下:

其中事务处理表示符合协议标识符我们正常使用设置为0即可 长度为6个字节 0x0006
简单来说,也就是Modbus-TCP是在Modbus-ACSII的基础上,去掉校验,然后加上五个字节的0和一个06
最后附上 Modbus标准协议手册链接
Modbus标准协议手册
三、stm32+HC-SR04超声波模块,对外提供RS485和Modbus协议
3.1 硬件设计
- 超声波雷达模块
- 超声波传感器:12个HC-SR04模块,每个模块有Trig和Echo引脚。
- 连接方式:将每个HC-SR04模块的Trig和Echo引脚分别连接到STM32F103的GPIO引脚上。
- 微控制器
- 微控制器:STM32F103系列,至少需要12个GPIO用于超声波模块的Trig和Echo信号。
- 时钟设置:72MHz的系统时钟频率。
- 通信接口
- RS485接口:采用MAX485芯片,实现RS485物理层通信。
- 串口配置:STM32的USART接口用于与MAX485通信。
- 电源管理
- 电源:汽车电源通常为12V,需要DC-DC转换器将12V转换为STM32和HC-SR04模块所需的5V和3.3V。
3.2 软件设计
- 底层驱动
- GPIO驱动:配置GPIO引脚为输出模式(Trig)和输入模式(Echo)。
- 定时器驱动:使用定时器捕获HC-SR04的Echo信号高电平时间,计算距离。
- USART驱动:配置USART用于RS485通信,波特率根据具体需求设置,一般为9600或115200。
- 测距算法
- 触发信号:发送至少10us的高电平到Trig引脚。
- 捕获回波:定时器捕获Echo信号的高电平时间,通过时间计算距离。
- Modbus协议栈
- 帧格式:实现Modbus RTU协议的帧格式,包括地址域、功能码、数据域和CRC校验
- 读写操作:支持基本的读寄存器和写寄存器操作,读取超声波模块的测距数据。
- 数据处理
- 距离测量:每个超声波模块测量到的距离存储在STM32的寄存器中。
- 错误处理:处理测量超时或无效数据的情况,确保系统的可靠性。
3.3 实现步骤
硬件连接
- 超声波模块连接:将每个HC-SR04的Trig和Echo分别连接到STM32的GPIO引脚,例如:Trig1 -> PA0, Echo1 -> PA1, Trig2 -> PA2, Echo2 -> PA3,依此类推。
- RS485连接:MAX485的DI连接到STM32的TX引脚,RO连接到STM32的RX引脚,DE和RE引脚连接在一起并连接到STM32的一个控制引脚(例如PA4),用于控制发送和接收状态。
- 电源连接:确保所有模块都供电正常,STM32和HC-SR04都需要3.3V/5V供电,MAX485需要5V供电。
软件开发
1. 初始化
- 配置系统时钟。
- 初始化GPIO引脚。
- 初始化定时器用于捕获Echo信号。
- 初始化USART用于RS485通信。
2. 超声波测距
- 触发每个HC-SR04模块,启动测距。
- 捕获Echo信号高电平时间,通过定时器计算距离。
- 将距离数据存储在寄存器中,供Modbus协议读取。
3. Modbus通信
- 实现Modbus RTU协议的帧解析和生成。
- 处理Modbus主站的请求,根据请求的功能码读取或写入寄存器。
- 返回对应的距离数据或执行相应操作。
4. 测试与调试
- 使用Modbus主站测试工具,验证通信协议的正确性。
- 通过调试工具和串口监视器,调试距离测量和通信功能。
总结
本设计方案提出了一种基于STM32F103和HC-SR04超声波模块的12路车载超声波雷达系统。系统采用RS485接口和Modbus协议,确保了数据通信的可靠性和扩展性。通过精心设计的硬件和软件,系统能够提供精确的障碍物检测和距离测量,满足智能汽车对环境感知的需求。
在实际开发过程中,还需要考虑更多的技术细节和工程挑战,例如电磁兼容性(EMC)、电源管理、环境适应性等。此外,还需要进行详细的系统分析、设计迭代和严格的测试验证。


















 7万+
7万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











