







 本文详细介绍了如何使用ROS进行四轮小车的仿真,包括创建功能包、编写URDF模型、集成到launch文件中,以及在Rviz中进行图形化显示和控制。通过一步步的教程,读者将掌握ROS环境中的基本模型搭建和可视化方法。
本文详细介绍了如何使用ROS进行四轮小车的仿真,包括创建功能包、编写URDF模型、集成到launch文件中,以及在Rviz中进行图形化显示和控制。通过一步步的教程,读者将掌握ROS环境中的基本模型搭建和可视化方法。
前言
ROS学习过程记录,从零开始仿真一辆小车,之后会实现运动控制、雷达、相机等
部分代码已上传至本人的GitHub,如果需要请自行下载:
创建一个四轮圆柱状机器人模型,添加摄像头和雷达传感器,并控制小车运动:
系列文章目录:
ROS仿真小车(一)—— urdf模型+rviz可视化
URDF 不能单独使用,需要结合 Rviz 或 Gazebo,URDF 只是一个文件,需要在 Rviz 或 Gazebo 中渲染成图形化的机器人模型,当前,首先演示URDF与Rviz的集成使用,因为URDF与Rviz的集成较之于URDF与Gazebo的集成更为简单
实现流程:
准备:新建功能包,导入依赖
核心:编写 urdf 文件
核心:在 launch 文件集成 URDF 与 Rviz
在 Rviz 中显示机器人模型
一、创建功能包
找一个空闲文件夹,创建ros功能包

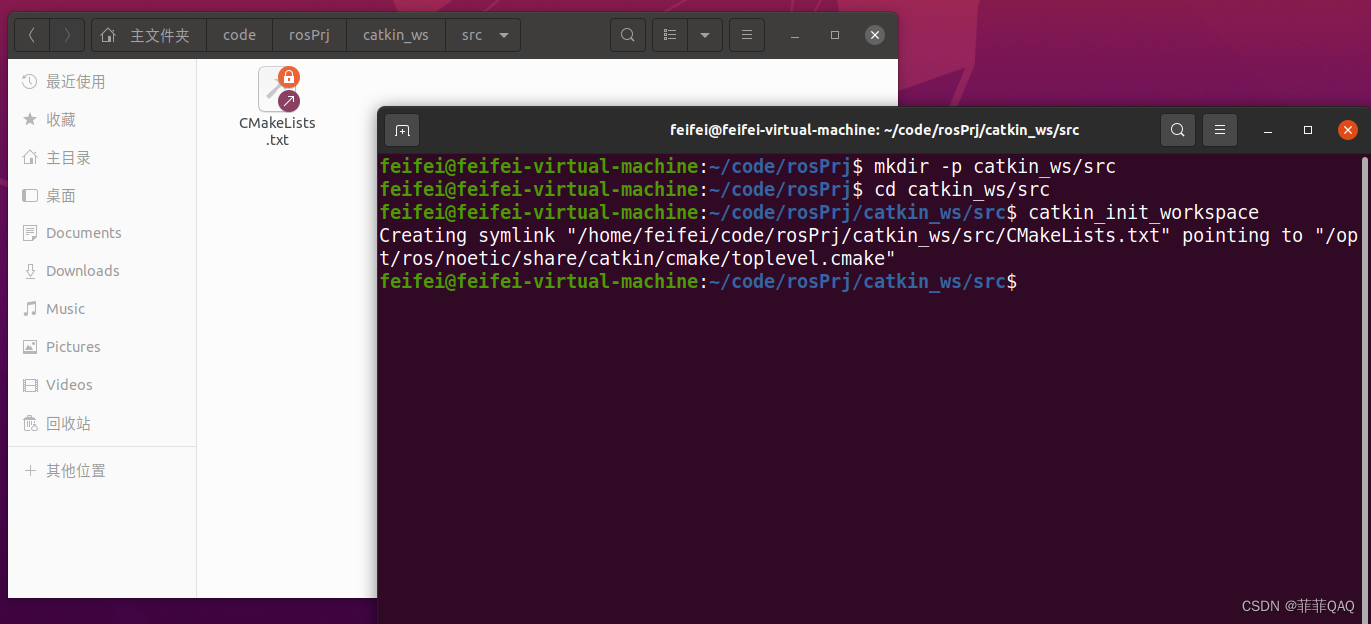
打开命令行终端,输入以下命令:
mkdir -p catkin_ws/src
cd catkin_ws/src
catkin_init_workspace
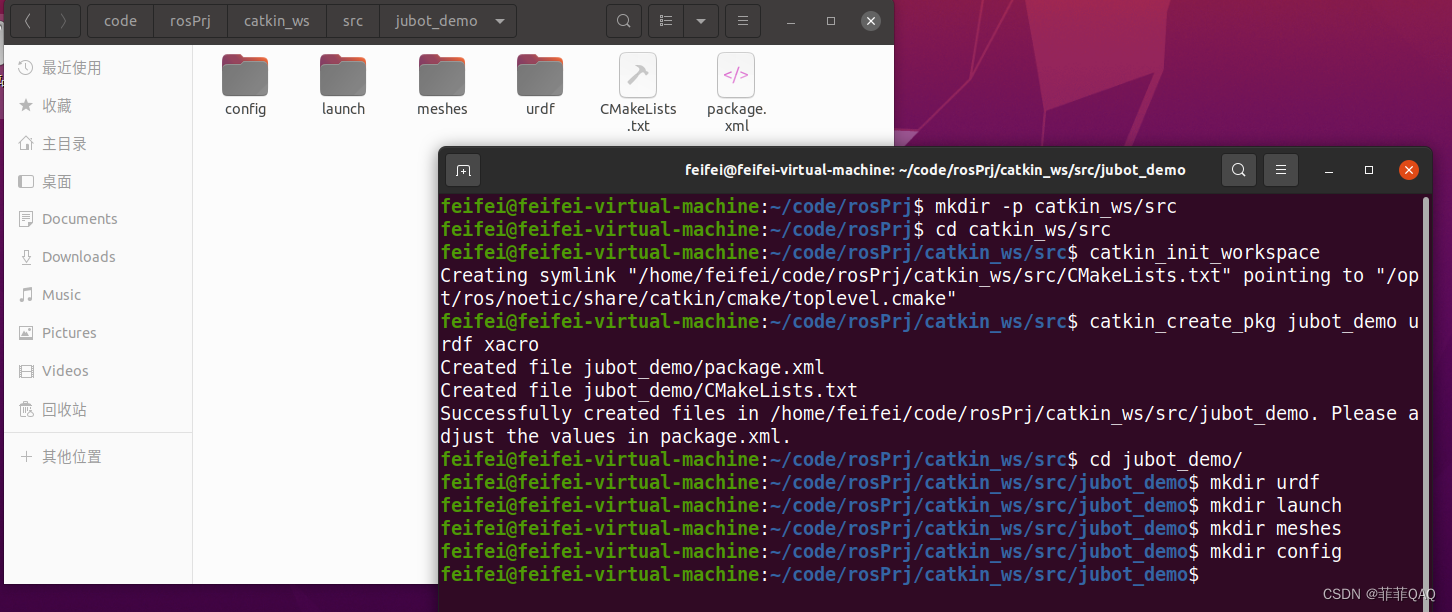
导入依赖,在src目录下输入以下命令:
catkin_create_pkg jubot_demo urdf xacro #创建功能包、添加依赖
cd jubot_demo/
mkdir urdf
mkdir launch
mkdir meshes #存放渲染机器人模型的文件
mkdir config #存放rviz配置的文件
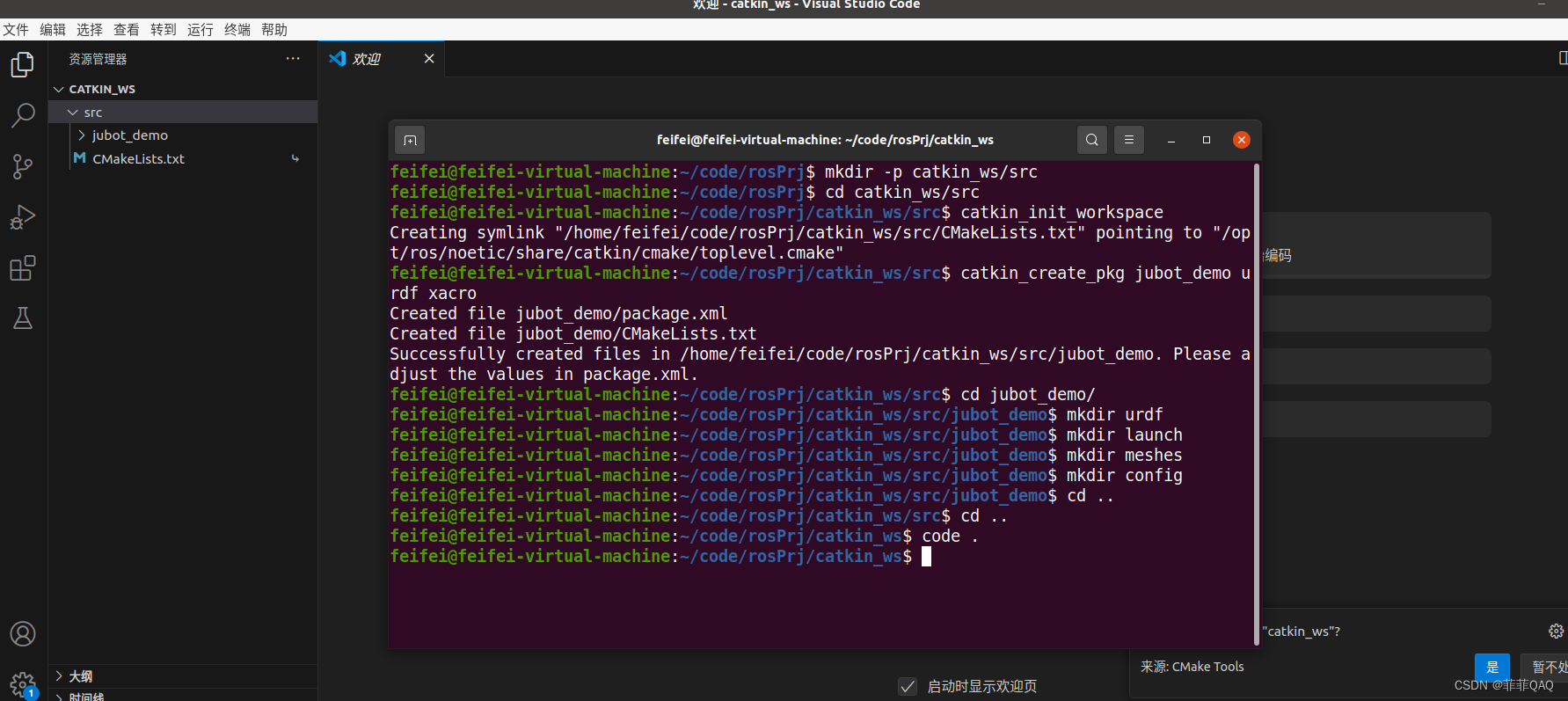
打开VS Code写两个文件
jubot_base.urdf(放urdf文件夹下)
display_jubot_base_urdf.launch(放launch文件夹下)
config里的rviz文件是保存生成的,不用写
二、urdf文件
Unified Robot Description Format,统一机器人描述格式,简称为URDF
模型的环节(link)与关节(joint)坐标关系,跟我的代码模型不匹配,仅供理解关系:

在基础模型之上,我们为机器人添加尺寸大小。由于每个环节的参考系都位于该环节的底部,关节也是如此,所以在表示尺寸大小时,只需要描述其相对于连接的关节的相对位置关系即可。URDF中的 origin 域就是用来表示这种相对关系。
如果我们为机器人的关节添加 axis 旋转轴参数,那么该机器人模型就可以具备基本的运动学参数。
注意代码中不能有中文注释
<?xml version="1.0" ?>
<robot name="jubot">
<!--base_car-->
<link name="base_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<cylinder radius="0.20" length="0.16"/>
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
</visual>
</link>
<!--left_wheel-->
<joint name="left_wheel_joint" type="continuous">
<origin xyz="0.0 0.19 -0.05" rpy="0.0 0.0 0.0"/>
<parent link="base_link"/>
<child link="left_wheel_link"/>
<axis xyz="0.0 1.0 0.0"/>
</joint>
<link name="left_wheel_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="1.5707 0.0 0.0"/>
<geometry>
<cylinder radius="0.06" length="0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<!--right_wheel-->
<joint name="right_wheel_joint" type="continuous">
<origin xyz="0.0 -0.19 -0.05"/>
<parent link="base_link"/>
<child link="right_wheel_link"/>
<axis xyz="0.0 1.0 0.0"/>
</joint>
<link name="right_wheel_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="1.5707 0.0 0.0"/>
<geometry>
<cylinder radius="0.06" length="0.025"/>
</geometry>
<material name="white">
<color rgba="1 1.0 1.0 0.9"/>
</material>
</visual>
</link>
<!--front_caster-->
<joint name="front_caster_joint" type="continuous">
<origin xyz="0.18 0.0 -0.095" rpy="0.0 0.0 0.0"/>
<parent link="base_link"/>
<child link="front_caster_link"/>
<axis xyz="0.0 1.0 0.0"/>
</joint>
<link name="front_caster_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<sphere radius="0.015"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.95"/>
</material>
</visual>
</link>
<!--back_caster-->
<joint name="back_caster_joint" type="continuous">
<origin xyz="-0.18 0.0 -0.095" rpy="0.0 0.0 0.0"/>
<parent link="base_link"/>
<child link="back_caster_link"/>
<axis xyz="0.0 1.0 0.0"/>
</joint>
<link name="back_caster_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<sphere radius="0.015"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.95"/>
</material>
</visual>
</link>
</robot>
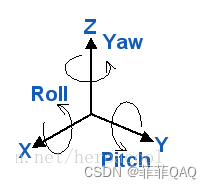
关于参数欧拉角rpy,是roll(滚转角)、pitch(俯仰角)、yaw(偏航角),分别对应绕x轴、y轴、z轴
三、launch文件
display_jubot_base_urdf.launch代码如下(示例):
<launch>
<!-- 设置机器人模型路径参数 -->
<param name="robot_description" textfile="$(find jubot_demo)/urdf/jubot_base.urdf" />
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher_gui" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<!-- 运行rviz可视化界面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find jubot_demo)/config/jubot_urdf.rviz" required="true" />
</launch>
四、图形化显示
安装一个检查urdf语法的工具:
sudo apt-get install liburdfdom-tools
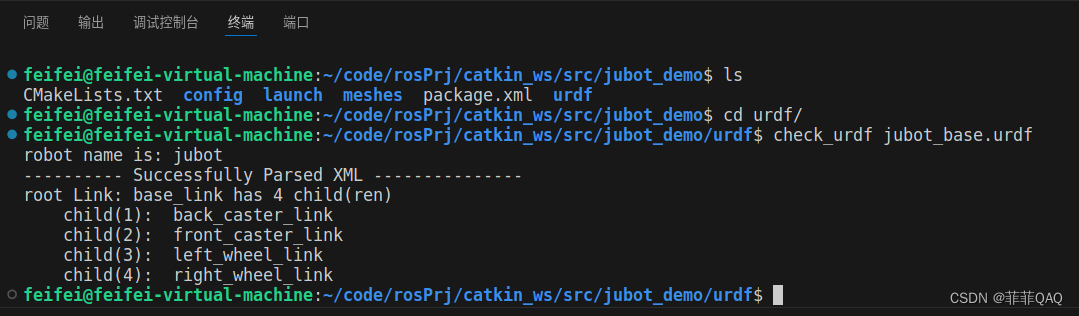
在urdf文件夹下打开终端检查语法:
check_urdf jubot_base.urdf
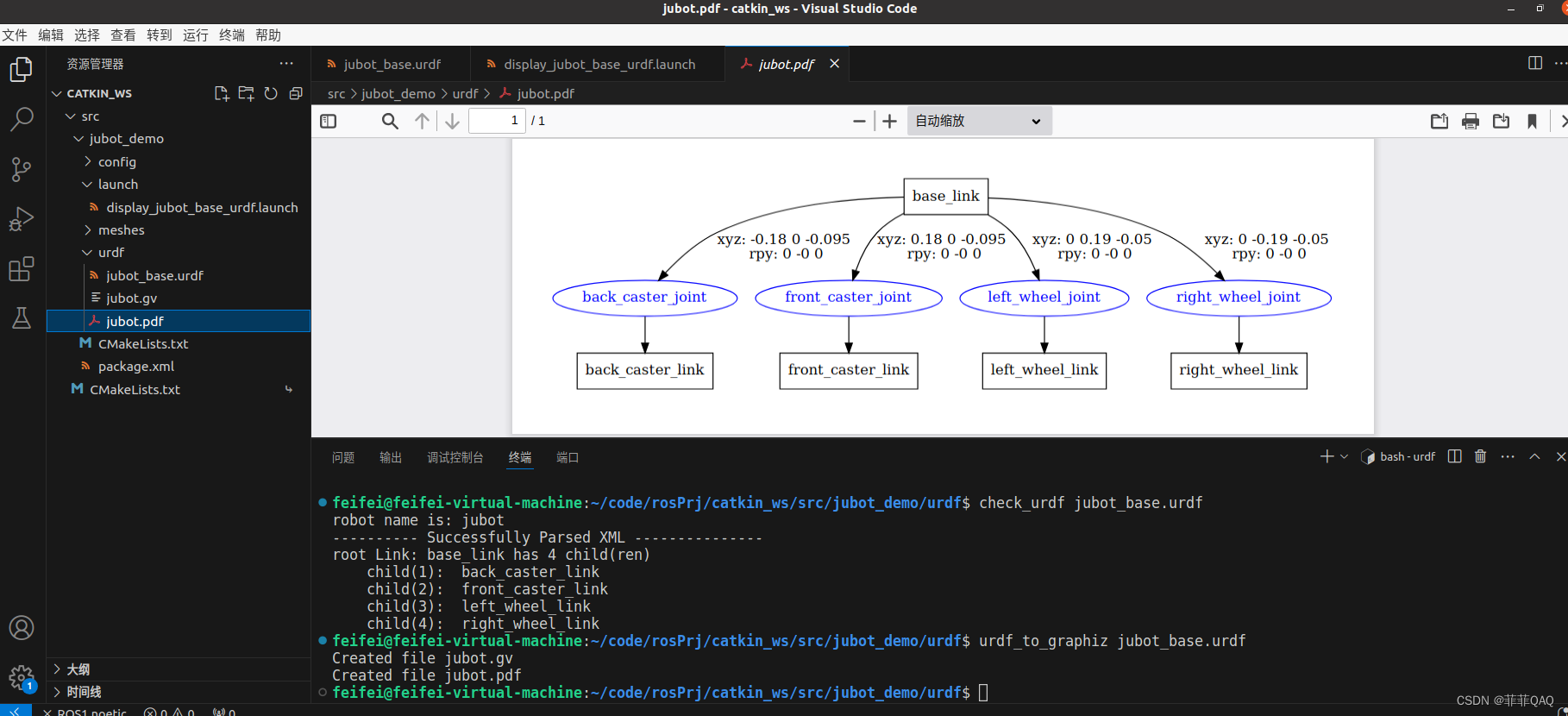
在urdf文件夹下打开终端,图形化显示URDF模型
urdf_to_graphiz jubot_base.urdf
此时会生成两个文件,打开pdf文件
五、RVIZ可视化
启动launch文件
roslaunch jubot_demo display_jubot_base_urdf.launch
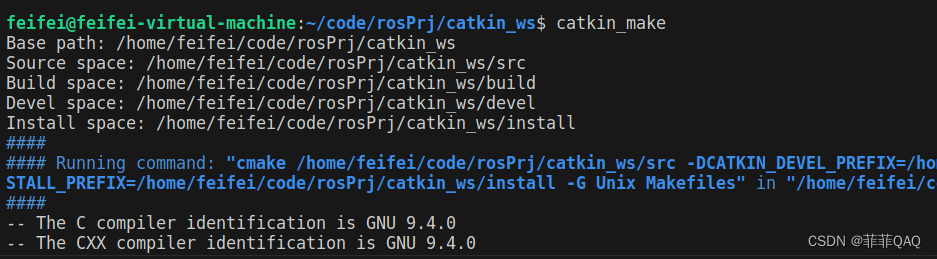
在启动launch文件之前,需要编译配置一下:
(1)退到主目录catkin_ws下,执行catkin_make
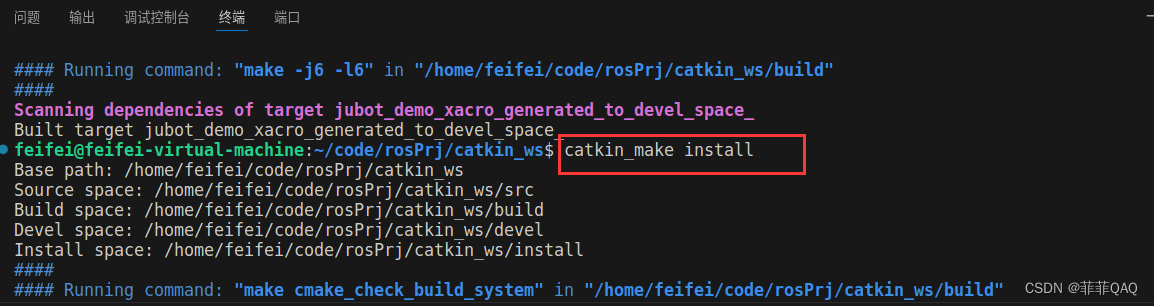
(2)执行成功之后,再执行catkin_make install
 (3)在主目录
(3)在主目录catkin_make下配置环境变量source devel/setup.bash

(4)检测环境变量是否配置成功echo $ROS_PACKAGE_PATH

到此,终于可以启动launch文件了
进入src目录下,输入命令roslaunch jubot_demo/launch/display_jubot_base_urdf.launch

窗口自动打开了RVIZ
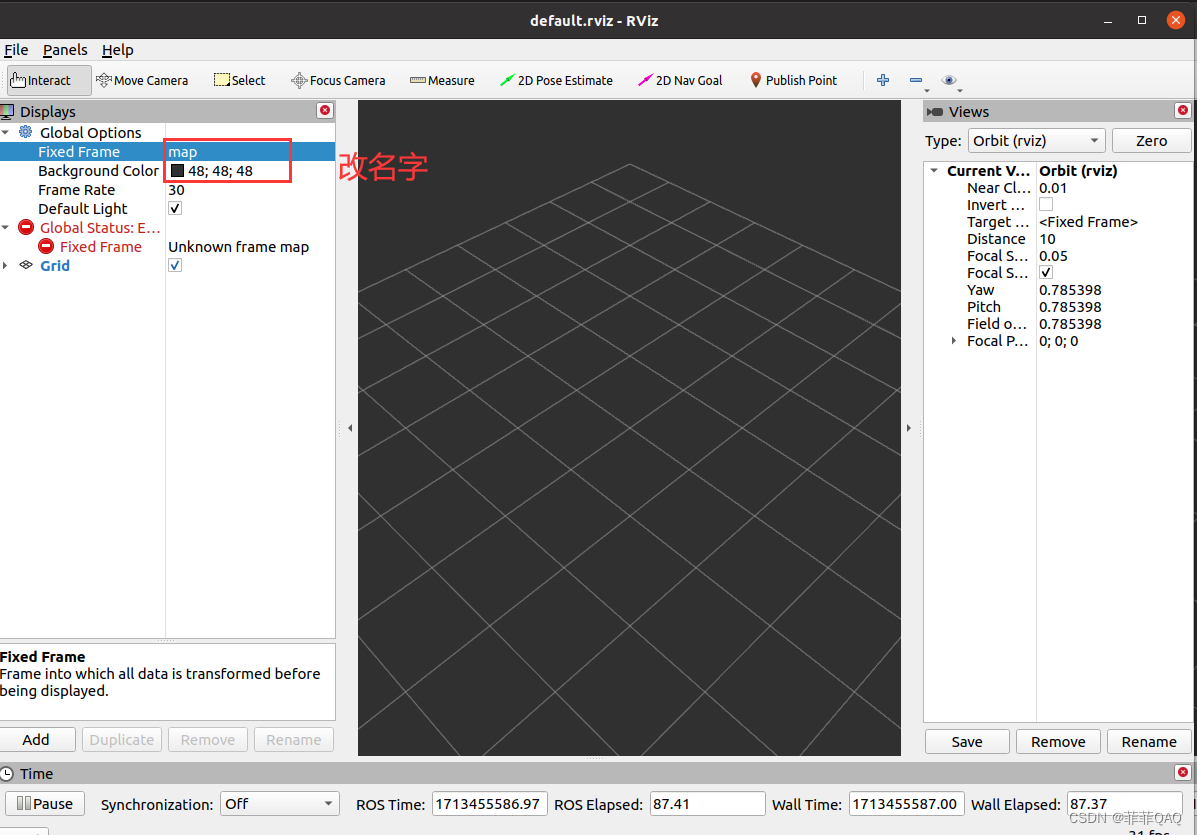
在global options下的Fixed Frame改为base_link,
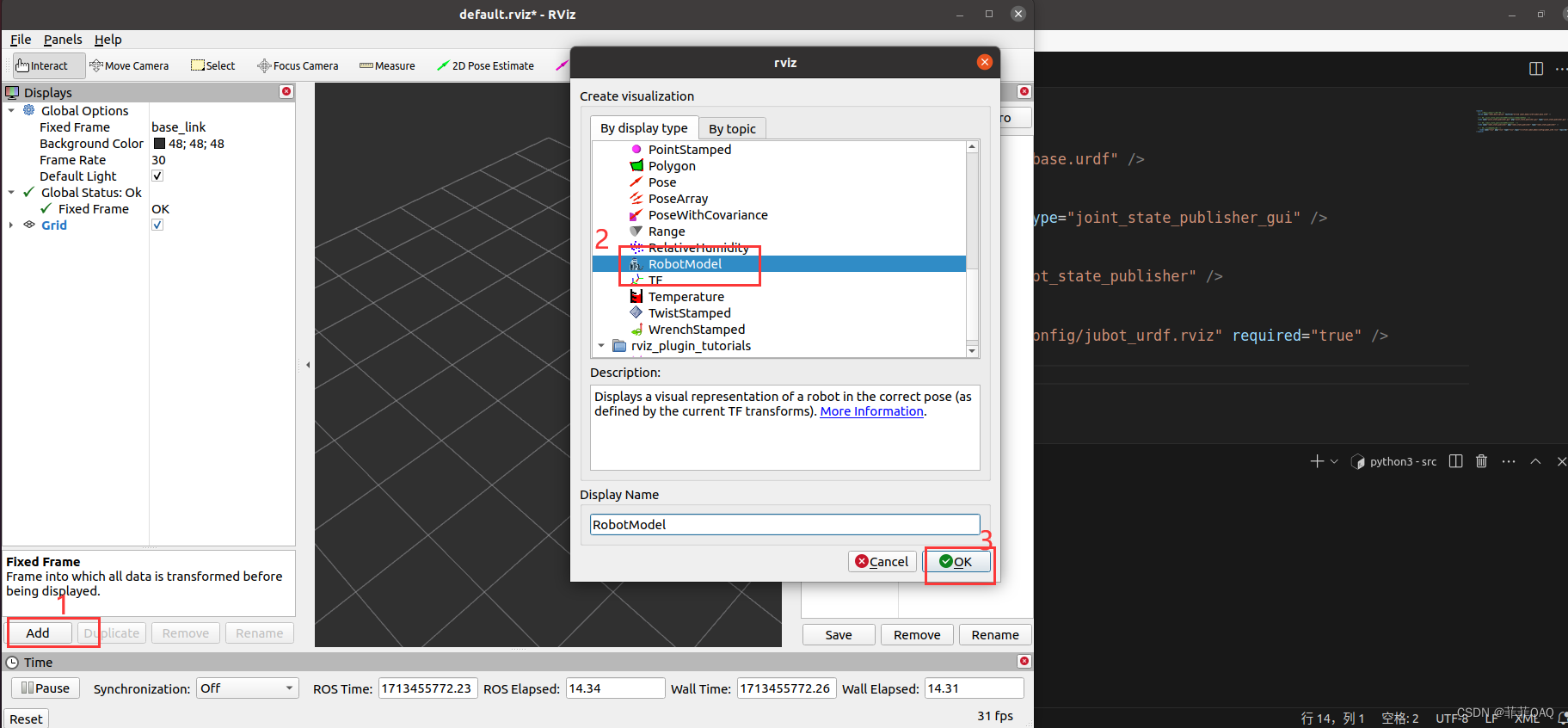
然后我们看到在屏幕左下方有一个add按钮,单击,添加robotmodel,确定以后,就会发现图形正确显示了。
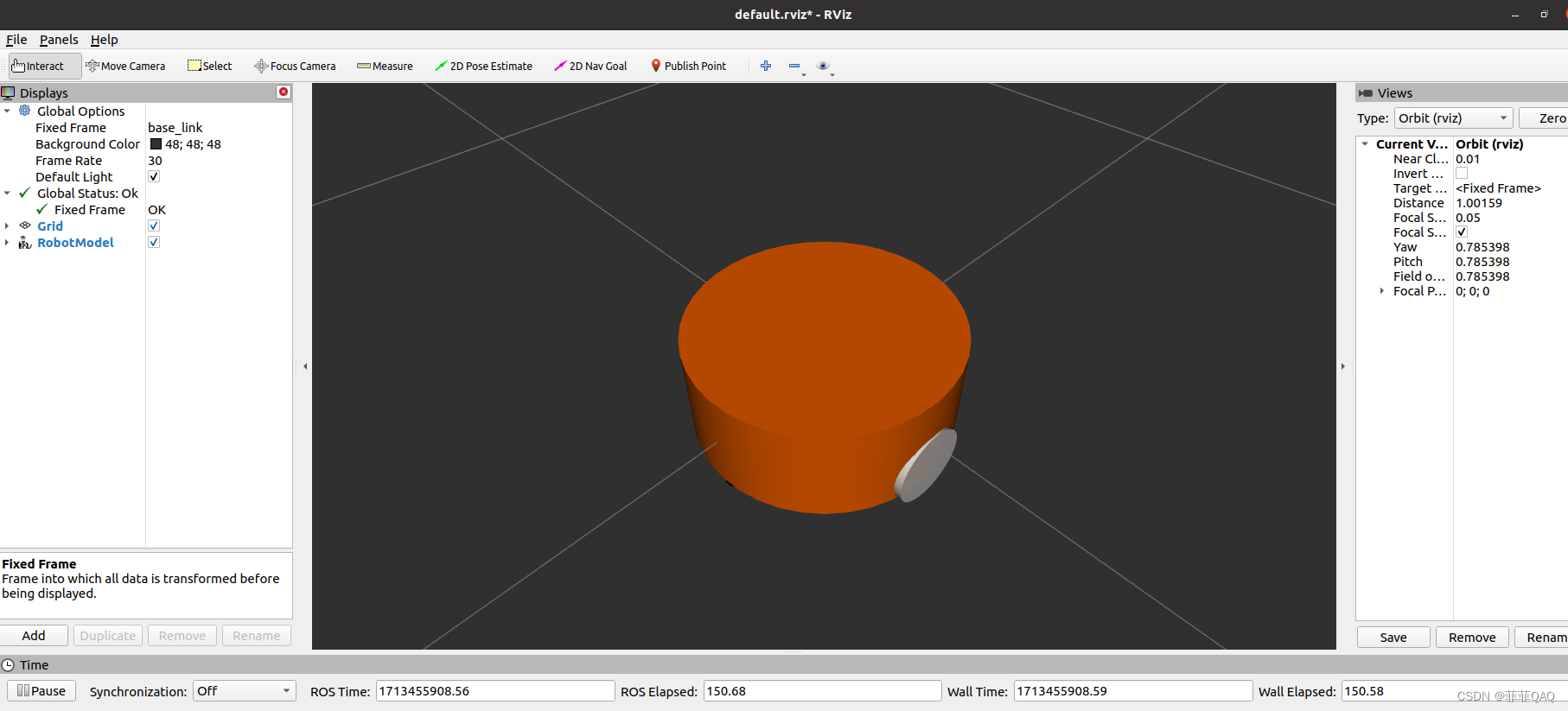
以上圆形步骤就完成了, 初步实现了urdf模型+rviz可视化。
总结
在仿真小车搭建过程中注意时刻查看自己的环境变量是否配置了,网上有很多ROS环境变量默认配置的教学视频,大家可以跟着设置一下,我这里由于篇幅限制,就没有具体说明配置过程。


















 718
718

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











