









SunnyG按:前段时间终于收到了Nvidia Jetson AGX Orin Developer Kit,摸索摸熟后将经验总结如下,分享给大家,如果有遇见其他问题,欢迎留言讨论。
===========================================================================
【【注意事项】】:
一 可以不刷机升级至Jetpack 5.0.2,详情可直接跳至查看文末【不刷机也升级到Jetpack 5.0.2】。
二 由于Jetson AGX Orin基于arm64,因此直接通过Terminal下载sdkmanager_1.9.0-10816_amd64.deb(在Orin机子上,不通过虚拟机)用命令行方式安装,是不行的,会显示类似arm64不兼容amd64之类的说明,因此选用虚拟机的途径。这里官网提供了quick-start的官方教程可以参考。
三 Jetson AGX Orin拿到手是ubuntu20.04版本的,跳出提示可升级至22.04版,一开始我就按照图形化界面指引升级到22.04,但是,升级后firefox,chromium浏览器都无法打开,一点击就跳出。通过网上搜了相关资料,是关于snap不支持的问题,也试过卸载后通过apt安装升级等方法,也是不行,现在还没找到解决办法,望大神指导。
四 Flash为5.0.2过程中最后的一步,即输入账号密码、ip地址页面时,可能出现这样的情况:invalid user id and password,无论你是否正确输入之前设定的账号密码。通过网上搜了相关资料,是关于pam的问题,也试过修改权限后进入到sshd config文本更改删去pam的方式,也是不行。但是,这个步骤其实刷机已经是完成了,可以skip后,启动Orin,是顺利的。这样会造成开机boot页面显示warning test key is used等,是不影响使用的。这里参考了其他用户相同情况以及nvidia forum工程师给出的解释:这是启动检查密钥的过程,这是用于对UEFI进行签名/加密的256位密钥。如果您没有分配密钥,它将使用测试密钥并弹出此警告消息。您可以在开发过程中忽略这一点。有兴趣了解的可以参看此处【forum链接】:


===========================================================================
Step 1:准备
环境:VMware Workstation 16,ubuntu 18.04,
材料:主机(win10+虚拟机)、Jetson AGX Orin 连接好网线(并与主机连同一路由器)、DP线、支持直连DP的显示屏、键鼠、通过Type-c与电脑主机连接,选择连到虚拟机上。一件NVME SSD。
软件:Nvidia官方sdkmanager,目前版本为sdkmanager_1.9.0-10816_amd64(官网下载,有需要安装包可以留言邮箱),sdkmanager放在虚拟机上。
账号:在Nvidia官网使用邮箱注册账号,等下使用
达成:Jetson AGX Orin 升级为Jetpack5.0.2版本,系统设置为NVME固态硬盘SSD启动。
===========================================================================
Step 2:开工
由于可预见嵌入式AI的各类框架所需容量是相当的大,Orin 32GMemory + 64GStorage也撑不了很长的,那么最好的选择就是在一开始增加外存,选择读取速率快和容量大的更优,一步到位,免去不少麻烦,而且相对与Orin整体价格这个也是值得的。
首先安装NVME,插入,拧螺丝

搜索disk,选择NVME,格式化,设为支持linux的Ext4格式。
点击小三角,mount挂载。
可以在终端Terminal用命令df -h显示已经挂载成功。
选择从NVME启动有两种方式,
一是刷机是直接选择将系统安装到NVME上,
二是将系统文件copy到NVME内设置启动,跳到文末查看。
进入ubuntu,刷机的前期过程可以参考这里Tx1的,大致差不多:Jetson TX1 刷机https://blog.csdn.net/weixin_68990480/article/details/127741826
不一样的地方在:
一 进入Recovery模式:同时按下Power键和Recovery键
二 选择的是Jetpack 5.0.2
三 这里storage选择nvme,flash完毕后系统即自动从nvme启动
(如果是不刷机的朋友,可以跳到文末查看:【将系统文件copy到NVME内设置启动】)
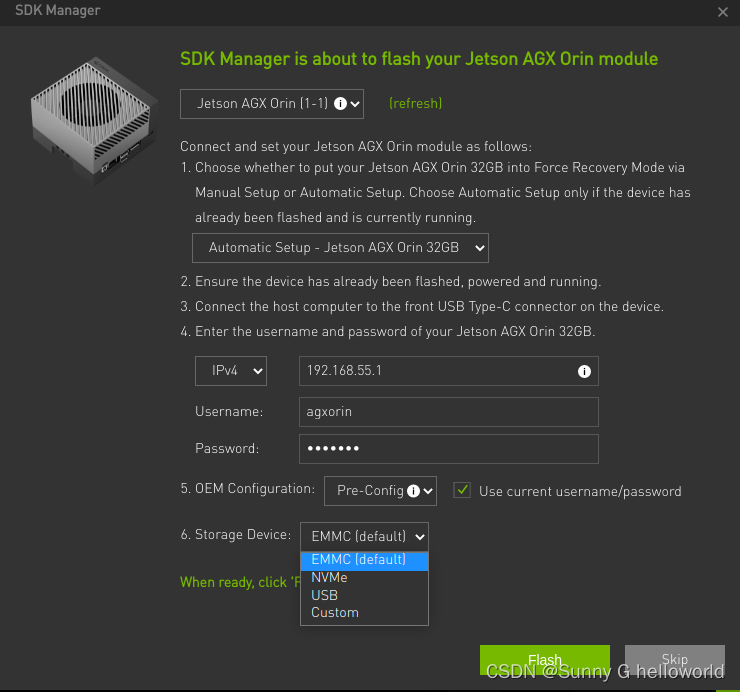
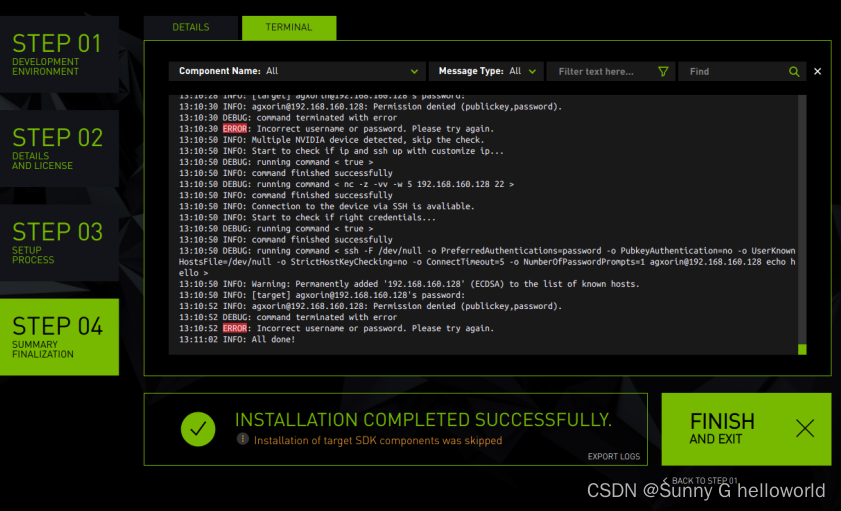
四 这里页面连接SSH再也不能像Tx1使用拔网线的方法了,而且账号密码输入也都不对,详见上文【注意事项 四】,这里我刷了几次,最终都是skip收场,系统也是能顺利进入的。

===========================================================================
【将系统文件copy到NVME内设置启动】的方法:
一 下载包
git clone https://github.com/jetsonhacks/rootOnNVMe
二 解压到路径
三 进入目录
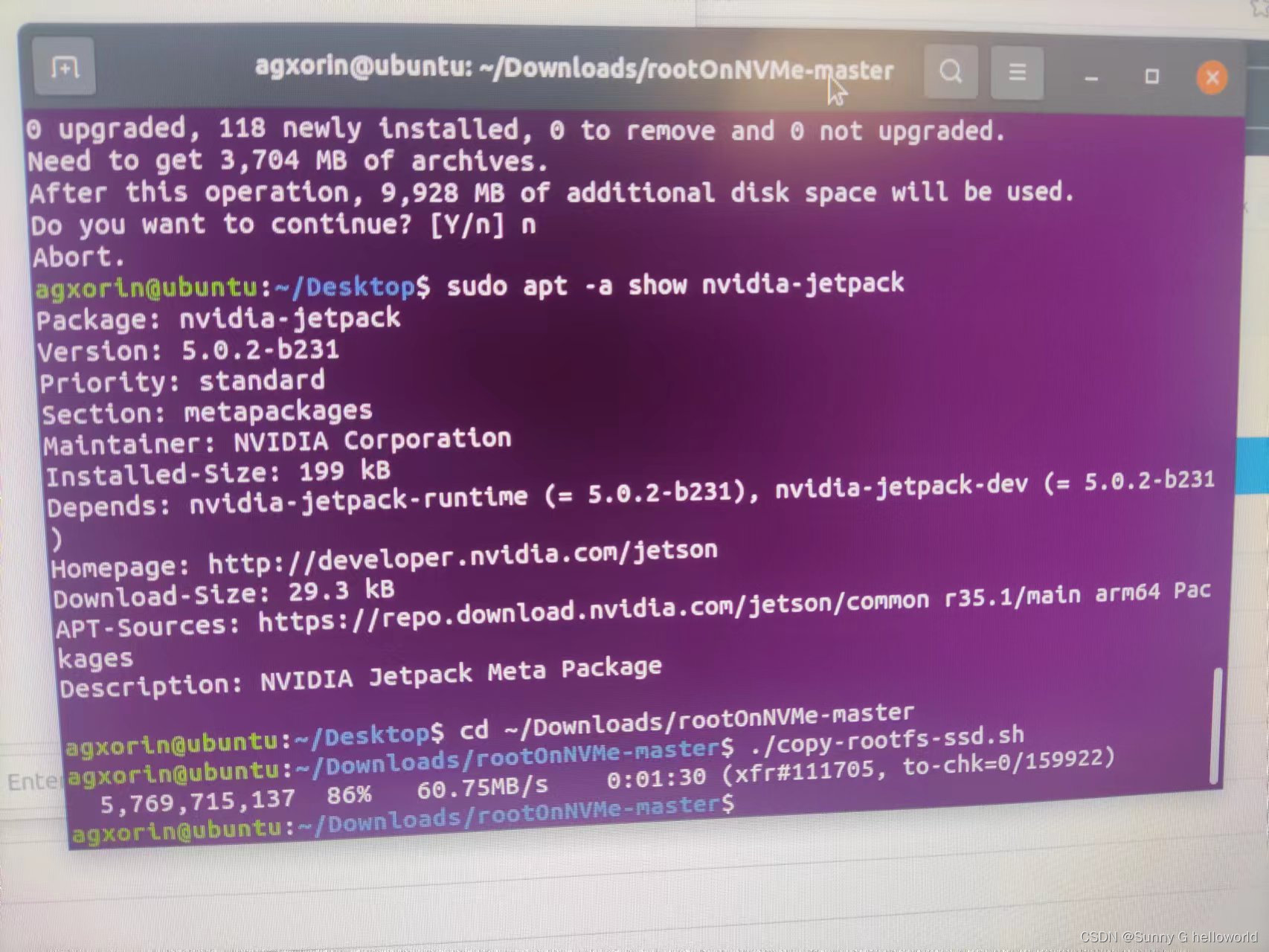
cd rootOnNVMe master
四 复制脚本
./copy-rootfs-ssd.sh
五 安装启动,将rootfs设置为NVME
./setup-service.sh
六 重启
sudo reboot
注意:重启后,你会发现原computer的存储空间和SSD的互换了,computer现为你的NVME,而原来的变为59 GB Volume,就让它留着不要删除或者unmount它,反正那边2T够用,不要增添不必要的麻烦。


===========================================================================
【不刷机也升级到Jetpack 5.0.2】
进入终端Terminal
更换arm/arm64的源
sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak
sudo vim /etc/apt/sources.list
deb https://repo.huaweicloud.com/ubuntu-ports/ bionic main restricted universe multiverse
deb-src https://repo.huaweicloud.com/ubuntu-ports/ bionic main restricted universe multiverse
deb https://repo.huaweicloud.com/ubuntu-ports/ bionic-security main restricted universe multiverse
deb-src https://repo.huaweicloud.com/ubuntu-ports/ bionic-security main restricted universe multiverse
deb https://repo.huaweicloud.com/ubuntu-ports/ bionic-updates main restricted universe multiverse
deb-src https://repo.huaweicloud.com/ubuntu-ports/ bionic-updates main restricted universe multiverse
deb https://repo.huaweicloud.com/ubuntu-ports/ bionic-backports main restricted universe multiverse
deb-src https://repo.huaweicloud.com/ubuntu-ports/ bionic-backports main restricted universe multiverse
更新:
sudo apt-get update
sudo apt-get upgrade
安装最新升级jetpack
sudo apt install nvidia-jetpack
等候...完成
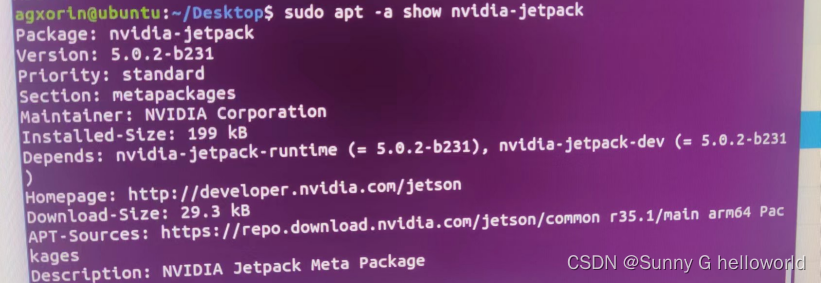
查看版本
sudo apt -a show nvidia-jetpack














 9199
9199











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









