






YOLOv8整体框架
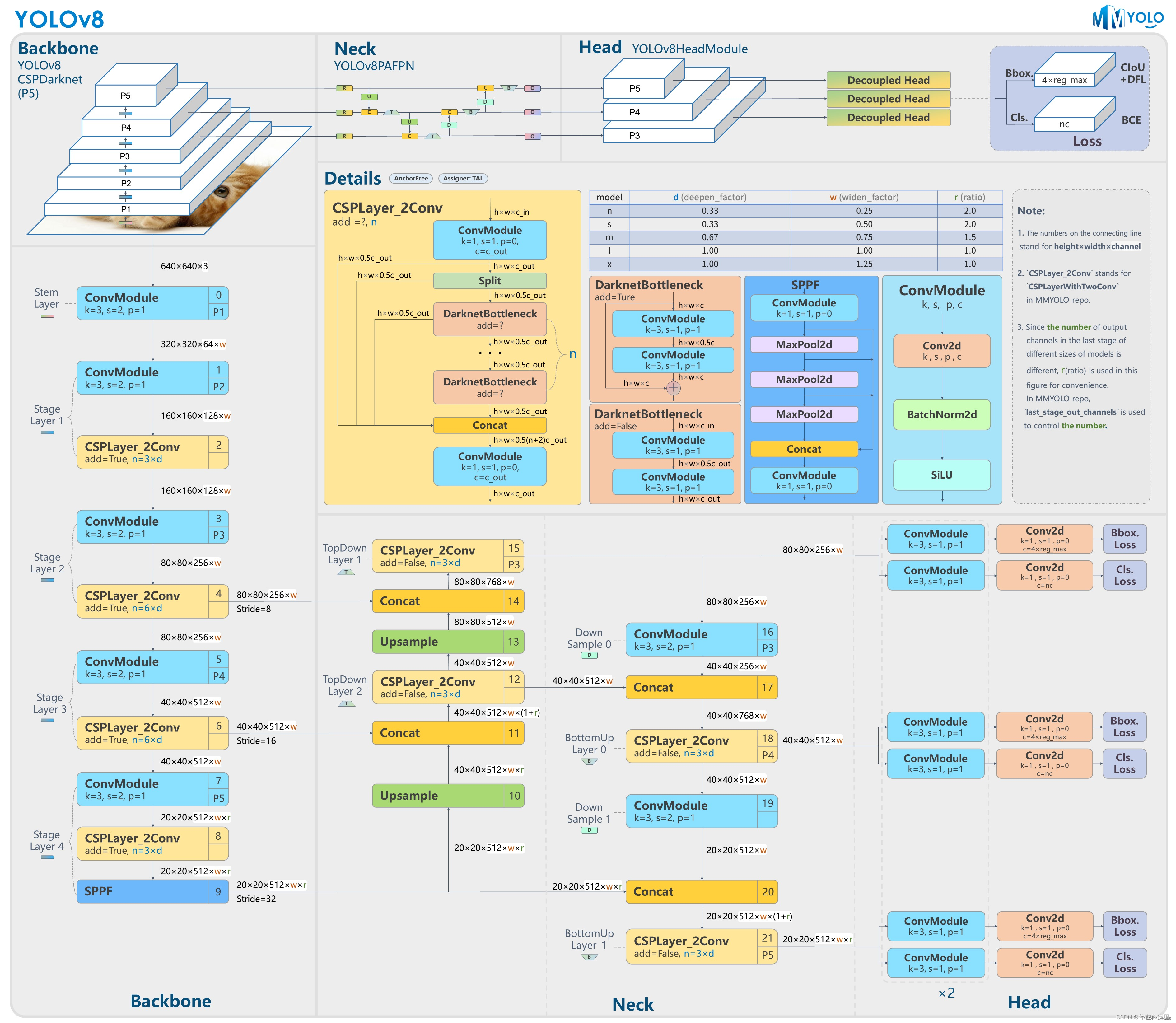
YOLOv8主要由Backbone、Neck和Head组成。我们对这三部分进行分析
Backbone 部分:主体是CSPDarkNet结构。(CSPDarkNet53)
yolov5和yolov8主体都是该结构,yolov5主要体现思想的结构是c3模块;yolov8主要体现思想的是c2f模块。
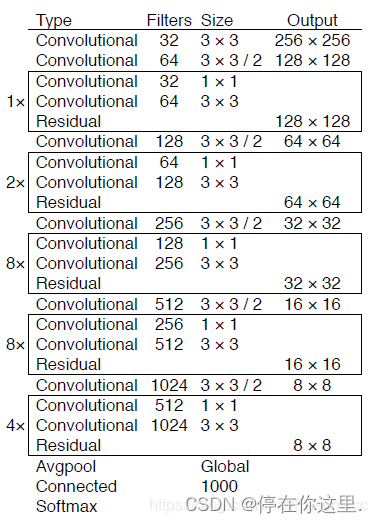
CSPDarkNet53结构
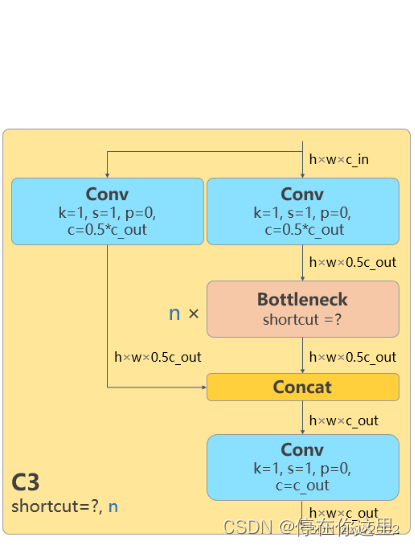
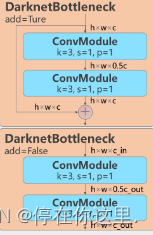
C3模块:C3模块的结构图,然后再对比与C2f的具体的区别。针对C3模块,其主要是借助CSPNet提取分流的思想,同时结合残差结构的思想,设计了C3 Block,CSP主分支梯度模块为BottleNeck模块。同时堆叠的个数由参数n来进行控制,也就是说不同规模的模型,n的值是有变化的。
class C3(nn.Module):
# CSP Bottleneck with 3 convolutions
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c1, c_, 1, 1)
self.cv3 = Conv(2 * c_, c2, 1) # optional act=FReLU(c2)
self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)))
def forward(self, x):
return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), 1)) C2f: C2f模块就是参考了C3模块以及ELAN的思想进行的设计,让YOLOv8可以在保证轻量化的同时获得更加丰富的梯度流信息。
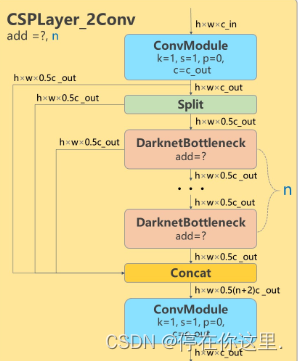
C2f模块
class C2f(nn.Module):
# CSP Bottleneck with 2 convolutions
def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
super().__init__()
self.c = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, 2 * self.c, 1, 1)
self.cv2 = Conv((2 + n) * self.c, c2, 1) # optional act=FReLU(c2)
self.m = nn.ModuleList(Bottleneck(self.c, self.c, shortcut, g, k=((3, 3), (3, 3)), e=1.0) for _ in range(n))
def forward(self, x):
y = list(self.cv1(x).split((self.c, self.c), 1))
y.extend(m(y[-1]) for m in self.m)
return self.cv2(torch.cat(y, 1)) -
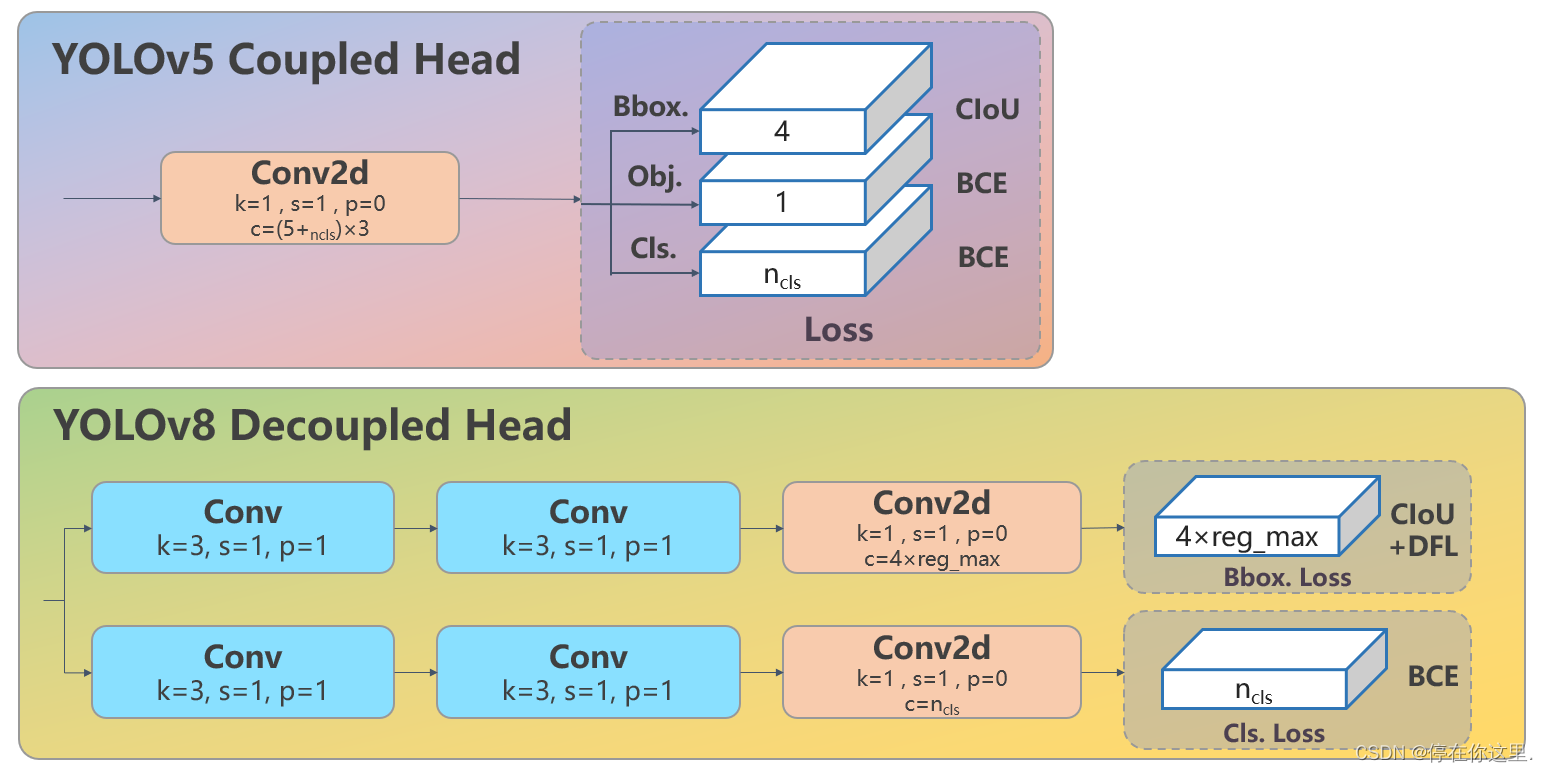
Head: Head部分较yolov5而言有两大改进:1)换成了目前主流的解耦头结构(
Decoupled-Head),将分类和检测头分离 2)同时也从 Anchor-Based 换成了 Anchor-Free -
解耦合结构:Decoupled Head不仅是模型精度上会提高,同时网络的收敛速度也加快了,使用Decoupled Head的表达能力更好,增强了模型的鲁棒性,可以更好地建模位置和类别之间的关系,提高目标检测性能。
-
耦合结构:耦合头的设计是在网络的末尾,通过一系列的卷积和全连接层,同时预测不同尺度的边界框位置、尺寸和类别。这种设计使得YOLOv5可以在不同尺度上并行地进行目标检测,即使用一层卷积同时完成分类和定位任务。
-
-
Neck模块:采用PANET结构
-
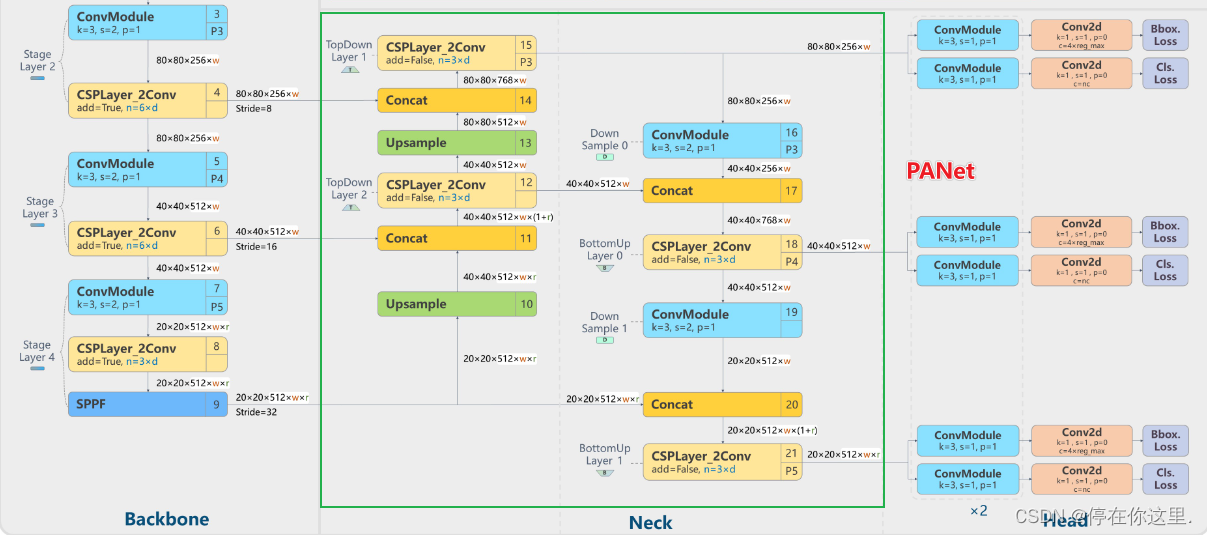 PANET结构:
PANET结构: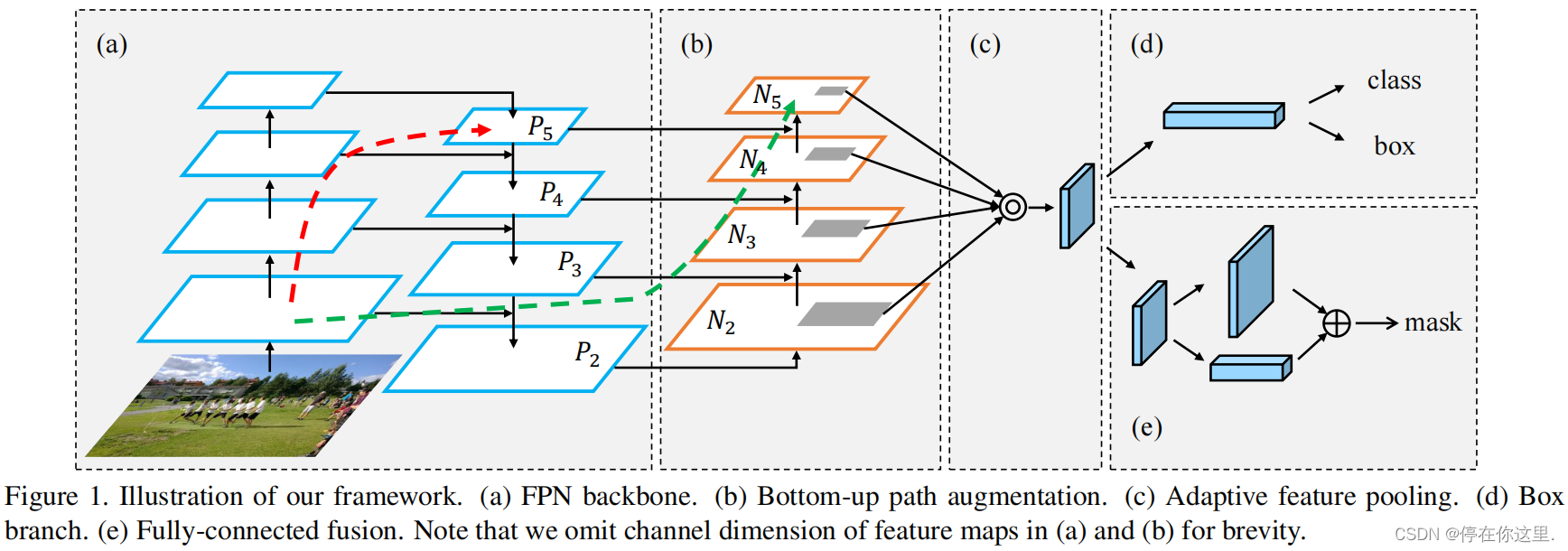
-
损失函数+改进方案持续更新中。。。

















 1236
1236

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









