






前言
在RoboMaster比赛中,舵轮底盘具有很强的机动性。舵轮机器人的底盘上一共有八个电机,其中包括四个行进轮电机和四个转向轮电机(舵机)。目前我们机械组采用GM6020电机作为舵机,行进轮是M3508、当然其实用什么电机做舵机对我们嵌入式来说并没有太大的关系。,我们只需要在代码上稍加改动即可。
一、舵轮姿态解算
舵轮底盘的姿态解算如下:
首先,任何机器人的运动都可以分解成三个方向:Vx(前后)、Vy(左右)、Vw(旋转)。
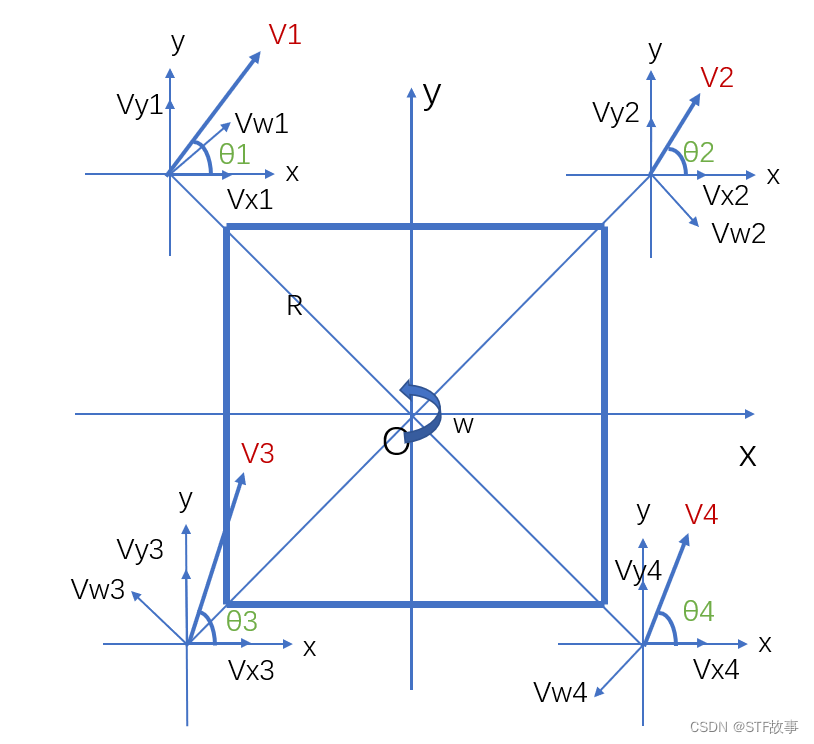
其中,Vw1=Vw2=Vw3=Vw4=w(旋转角速度) xR(圆周半径),V1、V2、V3、V4为行进轮的速度,θ1、θ2、θ3、θ4为舵轮的转向角。知道了这八个参数,就可以确定车体的运动。
二、代码分享
1.Chassis_steer_app.c
代码如下:
#include "Chassis_steer_app.h"
#include "string.h"
ChassisHandle_t ChassisHandle;
void Chassis_steerAppConfig(void)
{
ChassisHandle.console=Console_Pointer();
ChassisHandle.imu=IMU_GetDataPointer();
ChassisHandle.ctrl_mode = CHASSIS_RELAX;
ChassisHandle.structure.wheel_perimeter = WHEEL_PERIMETER; //轮子硬性参数
ChassisHandle.structure.wheeltrack = WHEELTRACK;
ChassisHandle.structure.wheelbase = WHEELBASE;
ChassisHandle.structure.Radius = RADIUS;
ChassisHandle.chassis_steer_motor[0].offset_ecd.chassis_offset_ecd =1726;
ChassisHandle.chassis_steer_motor[1].offset_ecd.chassis_offset_ecd =20;
ChassisHandle.chassis_steer_motor[2].offset_ecd.chassis_offset_ecd =7789;
ChassisHandle.chassis_steer_motor[3].offset_ecd.chassis_offset_ecd =3370;
ChassisHandle.steer_set[0].speed_direction=-1;
ChassisHandle.steer_set[1].speed_direction=-1;
ChassisHandle.steer_set[2].speed_direction=1;
ChassisHandle.steer_set[3].speed_direction=1;
for (uint8_t i=0; i<4; i++) //底盘8电机PID控制
{
ChassisHandle.chassis_motor[i].motor_info = ChassisMotor_Pointer(i);
ChassisHandle.chassis_steer_motor[i].motor_info=Chassis_steer_Motor_Pointer(i);
ChassisHandle.chassis_steer_motor[i].ecd_ratio=STEER_MOTO_POSITIVE_DIR *
STEER_REDUCTION_RATIO / ENCODER_ANGLE_RATIO;// 初始化舵机的转向系数
ChassisHandle.chassis_steer_motor[i].max_relative_angle = 180;
ChassisHandle.chassis_steer_motor[i].min_relative_angle = -180;
pid_init(&ChassisHandle.chassis_motor[i].pid, POSITION_PID, M3508_MOTOR_MAX_CURRENT, 3000.0f,
10.0f, 0.0f, 2.0f);
// pid_init(&ChassisHandle.chassis_steer_motor[i].pid.outer_pid, POSITION_PID, 500.0f, 0.0f,
// 20.0f, 0.0f, 4.0f); // 20 0 4
// pid_init(&ChassisHandle.chassis_steer_motor[i].pid.inter_pid, POSITION_PID, GM6020_MOTOR_MAX_CURRENT, 3000.0f,
// 40.0f, 0.1f, 0.0f); // 40
pid_init(&ChassisHandle.chassis_steer_motor[i].pid.outer_pid, POSITION_PID, 500.0f, 0.0f,
20.0f, 0.0f, 0.0f); // 20 0 4
pid_init(&ChassisHandle.chassis_steer_motor[i].pid.inter_pid, POSITION_PID, GM6020_MOTOR_MAX_CURRENT, 3000.0f,
10.0f, 0.0f, 0.0f); // 40
}
}
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{
CAN_RxHeaderTypeDef rx_header;
uint8_t rx_data[8];
/*CAN2接收*/
if(hcan->Instance == CAN2)
{
HAL_CAN_GetRxMessage(hcan, CAN_RX_FIFO0, &rx_header, rx_data); //receive can data
switch(rx_header.StdId)
{
/*行进轮*/
case CHASSIS_MOTOR_LF_MESSAGE_ID :
{
Motor_EncoderData(ChassisHandle.chassis_motor[0].motor_info, rx_data);
break;
}
case CHASSIS_MOTOR_RF_MESSAGE_ID:
{
Motor_EncoderData(ChassisHandle.chassis_motor[1].motor_info, rx_data);
break;
}
case CHASSIS_MOTOR_LB_MESSAGE_ID:
{
Motor_EncoderData(ChassisHandle.chassis_motor[2].motor_info, rx_data);
break;
}
case CHASSIS_MOTOR_RB_MESSAGE_ID:
{
Motor_EncoderData(ChassisHandle.chassis_motor[3].motor_info, rx_data);
break;
}
/*转向轮*/
case CHASSIS_STEER_MOTOR_LF_MESSAGE_ID :
{
Motor_EncoderData(ChassisHandle.chassis_steer_motor[0].motor_info, rx_data);
break;
}
case CHASSIS_STEER_MOTOR_RF_MESSAGE_ID:
{
Motor_EncoderData(ChassisHandle.chassis_steer_motor[1].motor_info, rx_data);
break;
}
case CHASSIS_STEER_MOTOR_LB_MESSAGE_ID:
{
Motor_EncoderData(ChassisHandle.chassis_steer_motor[2].motor_info, rx_data);
break;
}
case CHASSIS_STEER_MOTOR_RB_MESSAGE_ID:
{
Motor_EncoderData(ChassisHandle.chassis_steer_motor[3].motor_info, rx_data);
break;
}
}
}
/*CAN1接收*/
else if(hcan->Instance == CAN1)
{
HAL_CAN_GetRxMessage(hcan, CAN_RX_FIFO0, &rx_header, rx_data); //receive can data
switch(rx_header.StdId)
{
case CHASSIS_STEER_MOTOR_LF_MESSAGE_ID :
{
Motor_EncoderData(ChassisHandle.chassis_motor[0].motor_info, rx_data);
break;
}
case CHASSIS_STEER_MOTOR_RF_MESSAGE_ID:
{
Motor_EncoderData(ChassisHandle.chassis_motor[1].motor_info, rx_data);
break;
}
case CHASSIS_STEER_MOTOR_LB_MESSAGE_ID:
{
Motor_EncoderData(ChassisHandle.chassis_motor[2].motor_info, rx_data);
break;
}
case CHASSIS_STEER_MOTOR_RB_MESSAGE_ID:
{
Motor_EncoderData(ChassisHandle.chassis_motor[3].motor_info, rx_data);
break;
}
}
}
}首先,我们定义了ChassisHandle 的结构体,结构体内包含各个电机的信息、控制的模式、行进速度、舵机转角等,具体如下:
typedef struct
{
Console_t* console; //控制器模式
IMU_Data_t* imu; //IMU模块
MechanicalStructure_t structure; //底盘硬性参数
ChassisMotor_t chassis_motor[4]; //行进轮电机
Chassis_steer_Motor_t chassis_steer_motor[4]; //舵轮电机
ChassisCtrlMode_e ctrl_mode; //控制模式
fp32 vx; //Vx
fp32 vy; //Vy
fp32 vw; //Vw
fp32 wheel_rpm[4]; //用于存储转速信息
fp32 steeringAngleTarget[4];//舵机的目标转角
fp32 lastSteeringAngletarget[4]; //上一次的目标转角
fp32 steeringAngle[4]; //当前的舵机转角
fp32 last_steeringAngle[4]; //上一次的舵机转角
int32_t motor_circle[4]; //电机转过的圈数
int32_t motor_target_count[4]; //
Steer_Type steer_set[4]; //用于舵轮速度解算
uint16_t turnFlag[4]; //舵轮角度解算
fp32 chassis_yaw; //陀螺仪角度信息,下同
fp32 chassis_pitch;
fp32 chassis_roll;
}ChassisHandle_t;app文件用于初始化底盘信息的结构体,并获取各模块的指针信息。HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan) 为CAN的中断回调函数,接收电机编码器信息存入motor_info中。详细可看我的上一篇博客Robomaster电控组小白的学习经验分享(一)——用大疆C型开发板控制GM6020电机转动到既定角度_STF故事的博客-CSDN博客
ChassisHandle.chassis_steer_motor[0].offset_ecd.chassis_offset_ecd =1726; ChassisHandle.chassis_steer_motor[1].offset_ecd.chassis_offset_ecd =20;
ChassisHandle.chassis_steer_motor[2].offset_ecd.chassis_offset_ecd =7789;
ChassisHandle.chassis_steer_motor[3].offset_ecd.chassis_offset_ecd =3370;
这四行代码用于初始化舵机的偏移量,使四个舵机无论怎样安装,都可以在开机时回到设定的初始位置,偏移量要根据自己舵轮底盘舵机的安装方位而改变。
2.Chassis_steer_function.c
#include "Chassis_steer_function.h"
#include "arm_math.h"
#include "math.h"
fp32 Chassis_Steer_PID_Calc(Chassis_steer_pid_t* pid, fp32 angle_ref, fp32 angle_fdb, fp32 speed_fdb) //底盘舵电机PID(角度+速度)
{
pid->angle_ref = angle_ref;
pid->angle_fdb = angle_fdb;
pid_calc(&pid->outer_pid, pid->angle_fdb, pid->angle_ref);//角度环
pid->speed_ref = pid->outer_pid.out;
pid->speed_fdb = speed_fdb;
pid_calc(&pid->inter_pid, pid->speed_fdb, pid->speed_ref);//速度环
return pid->inter_pid.out;
}
void Steer_Speed_Calculate(ChassisHandle_t* chassis_handle, fp32 chassis_vx, fp32 chassis_vy, fp32 chassis_vw) //舵轮轮速解算
{
float theta = atan(1.0/1.0); //程序换算角度为弧度不能直接使用!!
fp32 steer_vw=chassis_vw*3.14/180;
float wheel_rpm_ratio;
fp32 wheel_rpm[4];
fp32 max = 0;
/*M3508_REDUCTION_RATIO为M3508减速比(1.0/19.0)
*/
wheel_rpm_ratio = 60.0f/(chassis_handle->structure.wheel_perimeter * M3508_REDUCTION_RATIO); //舵轮转速转换
wheel_rpm[0]
= sqrt(pow(chassis_vx - steer_vw*RADIUS*sin(theta),2)
+ pow(chassis_vy - steer_vw*RADIUS*cos(theta),2))*
wheel_rpm_ratio*chassis_handle->steer_set[0].speed_direction; //对应华南理工公式 Vx1-Vw1sin45*RADIUS
wheel_rpm[1]
= sqrt( pow(chassis_vx - steer_vw*RADIUS*sin(theta),2)
+ pow(chassis_vy + steer_vw*RADIUS*cos(theta),2))*
wheel_rpm_ratio*chassis_handle->steer_set[1].speed_direction; //对应华南理工公式 Vx2+Vw2sin45*RADIUS
wheel_rpm[2]
= sqrt( pow(chassis_vx + steer_vw*RADIUS*sin(theta),2)
+ pow(chassis_vy + steer_vw*RADIUS*cos(theta),2))*
wheel_rpm_ratio*chassis_handle->steer_set[2].speed_direction; //对应华南理工公式 Vy1-Vw1cos45*RADIUS
wheel_rpm[3]
= sqrt( pow(chassis_vx + steer_vw*RADIUS*sin(theta),2)
+ pow(chassis_vy - steer_vw*RADIUS*cos(theta),2))*
wheel_rpm_ratio*chassis_handle->steer_set[3].speed_direction; //对应华南理工公式 Vy2+Vw2cos45*RADIUS
//find max item
for (uint8_t i = 0; i < 4; i++)
{
if(chassis_handle->turnFlag[i]==1)
{
wheel_rpm[i] = -wheel_rpm[i];
}
else
{
wheel_rpm[i] = wheel_rpm[i];
}
if (fabs(wheel_rpm[i]) > max)
{
max = fabs(wheel_rpm[i]);
}
}
memcpy(chassis_handle->wheel_rpm, wheel_rpm, 4 * sizeof(fp32));
}
void Steer_angle_change(ChassisHandle_t* chassis_handle, fp32 chassis_vx, fp32 chassis_vy, fp32 chassis_vw)
{
float theta = atan(1.0/1.0);
fp32 wheel_angle[4];
fp32 steer_vw=chassis_vw*3.14/180;
if((chassis_vx==0)&&(chassis_vy==0)&&(chassis_vw==0))
{
memcpy(wheel_angle, chassis_handle->lastSteeringAngletarget, 4 * sizeof(fp32));
}
else //舵轮角度解算
{
wheel_angle[0]=atan2((chassis_vy-steer_vw*RADIUS*sin(theta)),
(chassis_vx-steer_vw*RADIUS*cos(theta))); //对应华南理工公式VX=tan-1((vy1-vw1cos45)/(vx1-vw1sin45))
wheel_angle[1]=atan2((chassis_vy+steer_vw*RADIUS*sin(theta)),
(chassis_vx-steer_vw*RADIUS*cos(theta))); //对应华南理工公式VX=tan-1((vy2-vw2cos45)/(vx2+vw2sin45))
wheel_angle[2]=atan2((chassis_vy+steer_vw*RADIUS*sin(theta)),
(chassis_vx+steer_vw*RADIUS*cos(theta))); //对应华南理工公式VX=tan-1((vy3+vw3cos45)/(vx3+vw3sin45))
wheel_angle[3]=atan2((chassis_vy-steer_vw*RADIUS*sin(theta)),
(chassis_vx+steer_vw*RADIUS*cos(theta))); //对应华南理工公式VX=tan-1((vy4+vw4cos45)/(vx4-vw4sin45))
for(uint8_t i=0;i<4;i++)
{
if(wheel_angle[i]-chassis_handle->lastSteeringAngletarget[i]>PI/2)
{
wheel_angle[i]=fmodf(wheel_angle[i]-PI,2*PI);
chassis_handle->turnFlag[i]=1;
}
else if(wheel_angle[i]-chassis_handle->lastSteeringAngletarget[i]<-PI/2)
{
wheel_angle[i]=fmodf(wheel_angle[i]+PI,2*PI);
chassis_handle->turnFlag[i]=1;
}
else
{
chassis_handle->turnFlag[i]=0;
}
}
}
memcpy(chassis_handle->lastSteeringAngletarget, wheel_angle, 4 * sizeof(fp32));
for(uint8_t i=0;i<4;i++)
{
wheel_angle[i]=wheel_angle[i]*180/PI;
}
memcpy(chassis_handle->steeringAngleTarget, wheel_angle, 4 * sizeof(fp32));
}
void Steer_Calculate(ChassisHandle_t* chassis_handle, fp32 chassis_vx, fp32 chassis_vy, fp32 chassis_vw) //舵轮底盘解算
{
Steer_angle_change(chassis_handle,chassis_vx,chassis_vy,chassis_vw);
Steer_Speed_Calculate(chassis_handle,chassis_vx,chassis_vy,chassis_vw);
}
void Steer_Chassis_ControlCalc(ChassisHandle_t* chassis_handle)
{
Steer_Calculate(chassis_handle, chassis_handle->vx, chassis_handle->vy, chassis_handle->vw);
}
void calculateRoundCnt(ChassisHandle_t* chassis_handle)
{
static float last_encoder[4] = {0};
for(uint8_t i=0;i<4;i++)
{
float now_encoder = chassis_handle->chassis_steer_motor[i].motor_info->ecd
- chassis_handle->chassis_steer_motor[i].offset_ecd.chassis_offset_ecd;
now_encoder = now_encoder/8192*360;
if(now_encoder - last_encoder[i] > 180)
chassis_handle->motor_circle[i] --;
else if(now_encoder - last_encoder[i] < -180)
chassis_handle->motor_circle[i] ++;
last_encoder[i] = now_encoder;
chassis_handle->steeringAngle[i] = -now_encoder - chassis_handle->motor_circle[i]*360;
chassis_handle->chassis_steer_motor[i].sensor.relative_angle=chassis_handle->steeringAngle[i]*-1;
}
}
void calculateTargetRoundCnt(ChassisHandle_t* chassis_handle)
{
float now_target[4];
static float last_target[4]={0,0,0,0};
memcpy(now_target, chassis_handle->steeringAngleTarget, 4 * sizeof(fp32));
for(uint8_t i=0;i<4;i++)
{
if(now_target[i] - last_target[i] > 180)
chassis_handle->motor_target_count[i] --;
else if(now_target[i] - last_target[i] < -180)
chassis_handle->motor_target_count[i] ++;
last_target[i] = now_target[i];
chassis_handle->steeringAngleTarget[i] = now_target[i] + chassis_handle->motor_target_count[i]*360 ;
}
}function文件用于舵轮的姿态解算以及其他的底层函数 。以上代码参考了华南理工的舵轮开源
RM_scut_infantry: RM2021-华南理工大学-普渡华南虎战队-舵轮步兵代码
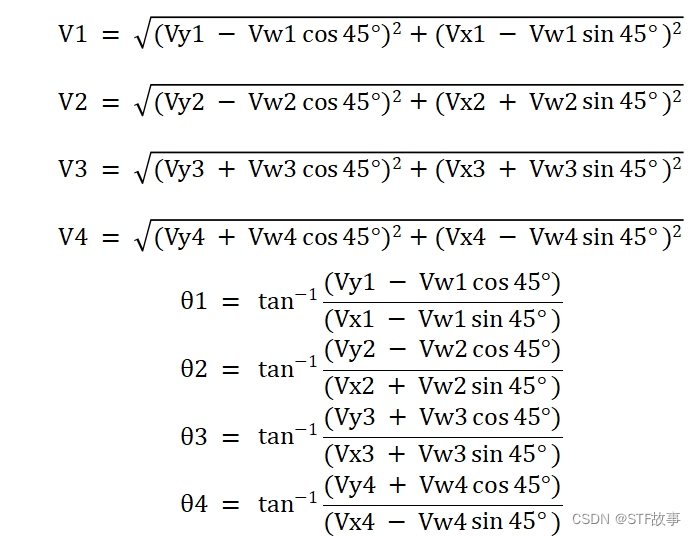
Chassis_Steer_PID_Calc函数为双环PID的解算函数;Steer_Speed_Calculate函数为行进轮转速的解算函数,即求Vx1、Vx2、Vx3、Vx4,然后将计算结果复制到ChassisHandle结构体中的wheel_rpm[4];Steer_angle_change函数用于解算舵机的转角(θ1、θ2、θ3、θ4),然后复制到ChassisHandle结构体中的steeringAngleTarget[4]数组。
calculateRoundCnt函数用于计算当前舵机的相对角度,将编码器的值转换为以度为单位的角度值,存入ChassisHandle结构体中的steeringAngle[4];calculateTargetRoundCnt函数是对ChassisHandle结构体中steeringAngleTarget[4]数组中的数据进行处理,跟踪每个电机旋转的次数,并相应地调整转向角度目标值。
3.Chassis_steer_function.c
#include "Chassis_steer_task.h"
#include "Chassis_steer_app.h"
#include "Chassis_steer_function.h"
#include "cmsis_os.h"
#include "bsp_can.h"
extern ChassisHandle_t ChassisHandle;
static void ChassisSensorUpdata(void);
void ChassisCtrlModeSwitch(void);
static void ChassisStopMode(void);
static void ChassisTestMode(void);
static void ChassisSeparateGimbalMode(void);
static void ChassisSpinMode(void);
void Chassis_Task(void const * argument)
{
for(;;)
{
ChassisSensorUpdata();
ChassisCtrlModeSwitch();
switch(ChassisHandle.ctrl_mode)
{
case CHASSIS_SEPARATE_GIMBAL:
{
ChassisSeparateGimbalMode();
}
break;
case CHASSIS_SPIN:
{
ChassisSpinMode();
}
break;
case CHASSIS_TEST:
{
ChassisTestMode();
}
break;
case CHASSIS_STOP:
{
ChassisStopMode();
}
break;
default:
break;
}
calculateRoundCnt(&ChassisHandle);
calculateTargetRoundCnt(&ChassisHandle);
Steer_Chassis_ControlCalc(&ChassisHandle);
for (uint8_t i = 0; i < 4; i++) //PID控制
{
ChassisHandle.chassis_motor[i].given_speed = ChassisHandle.wheel_rpm[i];
ChassisHandle.chassis_motor[i].current_set = pid_calc(&ChassisHandle.chassis_motor[i].pid,
ChassisHandle.chassis_motor[i].motor_info->speed_rpm,
ChassisHandle.chassis_motor[i].given_speed);
ChassisHandle.chassis_steer_motor[i].given_value=ChassisHandle.steeringAngleTarget[i];
ChassisHandle.chassis_steer_motor[i].current_set = Chassis_Steer_PID_Calc(&ChassisHandle.chassis_steer_motor->pid,
ChassisHandle.steeringAngleTarget[i],
ChassisHandle.chassis_steer_motor->sensor.relative_angle,
ChassisHandle.chassis_steer_motor[i].sensor.palstance);//ChassisHandle.imu->gyro[2]*RAD_TO_ANGLE
} //ChassisHandle.chassis_steer_motor->motor_info->speed_rpm
if(ChassisHandle.ctrl_mode == CHASSIS_RELAX)
{
for (uint8_t i = 0; i < 4; i++)
{
ChassisHandle.chassis_motor[i].current_set = 0;
ChassisHandle.chassis_steer_motor[i].current_set = 0;
}
}
Motor_SendMessage(&hcan2,MOTOR_1TO4_CONTROL_STD_ID,ChassisHandle.chassis_motor[0].current_set,
ChassisHandle.chassis_motor[1].current_set,
ChassisHandle.chassis_motor[2].current_set,
ChassisHandle.chassis_motor[3].current_set); //轮输出
Motor_SendMessage(&hcan2,MOTOR_5TO8_CONTROL_STD_ID,ChassisHandle.chassis_steer_motor[0].current_set,
ChassisHandle.chassis_steer_motor[1].current_set,
ChassisHandle.chassis_steer_motor[2].current_set,
ChassisHandle.chassis_steer_motor[3].current_set); //舵输出
osDelay(10);
}
}
static void ChassisSensorUpdata(void) //传感器数据更新
{
for(uint8_t i=0;i<4;i++)
{
ChassisHandle.chassis_steer_motor[i].sensor.palstance=ChassisHandle.chassis_steer_motor[i].motor_info->speed_rpm*6; //更新四个电机的角速度值
}
ChassisHandle.chassis_pitch=ChassisHandle.imu->attitude.pitch;
ChassisHandle.chassis_roll=ChassisHandle.imu->attitude.roll;
ChassisHandle.chassis_yaw=ChassisHandle.imu->attitude.yaw;
}
void ChassisCtrlModeSwitch(void)
{
if(ChassisHandle.console->chassis_cmd == CHASSIS_RELEASE_CMD)
{
ChassisHandle.ctrl_mode = CHASSIS_RELAX;
}
else if(ChassisHandle.console->chassis_cmd == CHASSIS_FOLLOW_GIMBAL_CMD)
{
ChassisHandle.ctrl_mode = CHASSIS_FOLLOW_GIMBAL;
}
else if(ChassisHandle.console->chassis_cmd == CHASSIS_SEPARATE_GIMBAL_CMD)
{
ChassisHandle.ctrl_mode = CHASSIS_SEPARATE_GIMBAL;
}
else if(ChassisHandle.console->chassis_cmd == CHASSIS_SPIN_CMD)
{
ChassisHandle.ctrl_mode = CHASSIS_SPIN;
}
else if(ChassisHandle.console->chassis_cmd == CHASSIS_TEST_CMD)
{
ChassisHandle.ctrl_mode = CHASSIS_TEST;
}
else if (ChassisHandle.console->chassis_cmd == CHASSIS_STOP_CMD)
{
ChassisHandle.ctrl_mode = CHASSIS_STOP;
}
}
static void ChassisStopMode(void)//停止模式
{
ChassisHandle.vx=0;
ChassisHandle.vy=0;
ChassisHandle.vw=0;
}
static void ChassisTestMode(void)//底盘测试模式VX,VY,VW测试
{
ChassisHandle.vx=ChassisHandle.console->chassis.vx;
ChassisHandle.vy=ChassisHandle.console->chassis.vy;
ChassisHandle.vw=ChassisHandle.console->chassis.vw;
}
static void ChassisSeparateGimbalMode(void)//分离模式
{
ChassisHandle.vx = ChassisHandle.console->chassis.vx;
ChassisHandle.vy = ChassisHandle.console->chassis.vy;
ChassisHandle.vw=ChassisHandle.console->chassis.vw;
}
static void ChassisSpinMode(void)//小陀螺模式
{
ChassisHandle.vw = 160;//160为初始值(详细可见infantry_console.c中的小陀螺模式切换,会在160的基础上再乘以spin_rate)
/*在除keyboard2模式下,vw的值在infantry_console.c中都没有过赋值,因此在此处自己赋值*/
ChassisHandle.vx = ChassisHandle.console->chassis.vx;
ChassisHandle.vy = ChassisHandle.console->chassis.vy;
}最后写freeRTOS的任务函数(各种模式的选择,PID运算以及CAN发送等)。
总结
以上便是本人对舵轮底盘的学习分享,自己加入嵌入式组也仅仅只有一年,还有很多要学习的地方。文章中有什么错误的、不合理的地方也希望大家能批评指正。写这篇博客旨在对自己近期的学习进行总结,也希望能帮助到大家。代码中还有很多需要改善的地方。由于机械组还未做出舵轮底盘,所以以下的视频仅仅只是电机的测试。
舵轮电机测试

















 5219
5219

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









